You might also like
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- ArduinoDocument14 pagesArduinowmarasigan2610No ratings yet
- Service Manual: GE SIGNA 1.5T T/R Knee and Foot Array CoilDocument28 pagesService Manual: GE SIGNA 1.5T T/R Knee and Foot Array CoilRogerio Castro100% (1)
- PIR Motion Sensor AlarmDocument46 pagesPIR Motion Sensor AlarmSyad AlyNo ratings yet
- Manual ArduinoDocument15 pagesManual ArduinoBalachandraNo ratings yet
- Arduino Course Final Exam Time: 45 Min: Choose The Best Answer For Each QuestionDocument6 pagesArduino Course Final Exam Time: 45 Min: Choose The Best Answer For Each QuestionalanNo ratings yet
- Arduino LectureDocument52 pagesArduino LectureSỹ RonNo ratings yet
- Philips Fwm998Document29 pagesPhilips Fwm998boroda2410No ratings yet
- Arduino Lab2Document89 pagesArduino Lab2sarvodayasingh100% (1)
- Arduino Radar ProjectDocument10 pagesArduino Radar ProjectJesus Mamani100% (2)
- Linear Magnetic SensorDocument1 pageLinear Magnetic Sensorpredrag152No ratings yet
- 12 X 12 Matrix Analog Pressure Sensors TutorialDocument4 pages12 X 12 Matrix Analog Pressure Sensors TutorialhasanNo ratings yet
- Part-1 PIR Motion Sensor and Servo CodeDocument15 pagesPart-1 PIR Motion Sensor and Servo CodeM Salman RyanNo ratings yet
- Adc ProgramsDocument5 pagesAdc Programsamareshgunda1404No ratings yet
- Sensor de Fuego 2Document7 pagesSensor de Fuego 2Pool Vila AdautoNo ratings yet
- ARDUINO Tinkercad Practices - NoDocument116 pagesARDUINO Tinkercad Practices - NoDavidNo ratings yet
- Interface Digital and Analog I/O Devices (Arduino Interfacing)Document29 pagesInterface Digital and Analog I/O Devices (Arduino Interfacing)Raggy TannaNo ratings yet
- Print Page - Turbidity Sensor CodingDocument3 pagesPrint Page - Turbidity Sensor CodingSubhasis BiswasNo ratings yet
- EnergiaDocument15 pagesEnergiaDaniel V Sam100% (1)
- Arduino Serial CommunicationDocument31 pagesArduino Serial CommunicationWin KyiNo ratings yet
- C++ Ultrasonic Ping Sensor Distance CodeDocument3 pagesC++ Ultrasonic Ping Sensor Distance CodeGroove GamingNo ratings yet
- Intro To The Arduino: Topics: The Arduino Digital IO Analog IO Serial CommunicationDocument33 pagesIntro To The Arduino: Topics: The Arduino Digital IO Analog IO Serial CommunicationPrince GoenkaNo ratings yet
- 4 Arduino ProgrammingDocument32 pages4 Arduino Programmingncqphuong.20it2No ratings yet
- Lab 2 - 7 Segment Display and Analog InputsDocument27 pagesLab 2 - 7 Segment Display and Analog Inputsroger david pimienta barrosNo ratings yet
- SEN 17 037 DatasheetDocument7 pagesSEN 17 037 DatasheetahmadNo ratings yet
- Arduino ExamplesDocument16 pagesArduino ExamplesKapila WijayaratneNo ratings yet
- LAMPIRANDocument18 pagesLAMPIRANResky HarsuniNo ratings yet
- DmuXfU4SEeiBcwquuD4ZzA Quiz1 AssignmentDocument6 pagesDmuXfU4SEeiBcwquuD4ZzA Quiz1 AssignmentJoshikaNo ratings yet
- Arduino v2Document68 pagesArduino v2sadekNo ratings yet
- Expanding Arduino's Pins with a Demultiplexer IC 4051Document8 pagesExpanding Arduino's Pins with a Demultiplexer IC 4051francoNo ratings yet
- KY 013 Joy ITDocument6 pagesKY 013 Joy ITTesoro HonNo ratings yet
- Job Sheet P2 - Antarmuka Arduino Dan ProcessingDocument11 pagesJob Sheet P2 - Antarmuka Arduino Dan ProcessingRifky MuhamadNo ratings yet
- Jobsheet 6 - TI2B - 07 - Dwi Suci AmliapdfDocument26 pagesJobsheet 6 - TI2B - 07 - Dwi Suci AmliapdfDwi SuciNo ratings yet
- Ardu5 para S4ADocument6 pagesArdu5 para S4AEDWARD ENRIQUE ROJAS BARBOSANo ratings yet
- Introduction To ArduinoDocument22 pagesIntroduction To ArduinoSourabh BanerjeeNo ratings yet
- Arduino - AnalogInOutSerialDocument4 pagesArduino - AnalogInOutSerialAhmed JafarNo ratings yet
- IOT IntroductionDocument23 pagesIOT IntroductionMadhuNo ratings yet
- UntitledDocument1 pageUntitledGroove GamingNo ratings yet
- Chapter 7 and 8Document12 pagesChapter 7 and 8Amruta AvhaleNo ratings yet
- Arduino Einfuehrung SchulzeDaniel SS2010Document28 pagesArduino Einfuehrung SchulzeDaniel SS2010Fernando MoreiraNo ratings yet
- Controler PDFDocument15 pagesControler PDFKhoiril HudaNo ratings yet
- Toaz - Info Arduino Course Final Exam PRDocument6 pagesToaz - Info Arduino Course Final Exam PRmontassar limemNo ratings yet
- C Programming LanguageDocument34 pagesC Programming Languagemohamed ramadanNo ratings yet
- Toaz - Info Arduino Course Final Exam PRDocument6 pagesToaz - Info Arduino Course Final Exam PRmontassar limemNo ratings yet
- AN128 - Cozir ArduinoDocument4 pagesAN128 - Cozir ArduinoMatthew Heitzenroder100% (1)
- 4-digit 7-segment display RTC clockDocument21 pages4-digit 7-segment display RTC clockfrasekh100% (1)
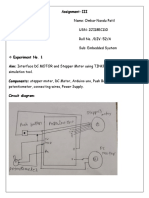
- Name: Omkar Nandu Patil USN: 2JI18EC110 Roll No. /DIV: 52/A Sub: Embedded SystemDocument22 pagesName: Omkar Nandu Patil USN: 2JI18EC110 Roll No. /DIV: 52/A Sub: Embedded SystemOMKAR PATILNo ratings yet
- S4AFirmware16 InoDocument5 pagesS4AFirmware16 InoribazetaNo ratings yet
- Lab 2 Analog Input and Output: ComponentsDocument5 pagesLab 2 Analog Input and Output: ComponentsAbdul AzizNo ratings yet
- This Lesson Will Teach You To Turn On and Off Leds Using WebpageDocument24 pagesThis Lesson Will Teach You To Turn On and Off Leds Using WebpageSedrex De Veas CastilloNo ratings yet
- SensorsDocument5 pagesSensorsIrfanNo ratings yet
- Lecture 9Document31 pagesLecture 9Nader ShabrawyNo ratings yet
- Electronic 11111Document5 pagesElectronic 11111Kimberly Mae AsisNo ratings yet
- Day 1 Lab Manual - Simulation With ThinkerCADDocument12 pagesDay 1 Lab Manual - Simulation With ThinkerCADinfo.learninglabsonlineNo ratings yet
- Trabajo 23Document10 pagesTrabajo 23Noé Bonilla maciasNo ratings yet
- Lab2 CSE3006 Kushagra Srivastava 19BCE1003Document15 pagesLab2 CSE3006 Kushagra Srivastava 19BCE1003Chirag DuaNo ratings yet
- University Automoma of Queretaro Engineering Faculty: Digital System 2Document15 pagesUniversity Automoma of Queretaro Engineering Faculty: Digital System 2Carlos Eduardo Martínez Hernández100% (1)
- VijayrDocument75 pagesVijayrManoj SyNo ratings yet
- IoT Lab 2Document15 pagesIoT Lab 2Arshad KhanNo ratings yet
- Arduino LM35 SensorDocument5 pagesArduino LM35 SensorStephi S. Montesdeoca0% (1)
- Develop Routine of TF-Luna in Arduino: Step 1: Hardware ConnectionDocument6 pagesDevelop Routine of TF-Luna in Arduino: Step 1: Hardware ConnectionSumitra TNo ratings yet
- Lecturer No 1 - Transformer BasicDocument1 pageLecturer No 1 - Transformer Basiclvb123No ratings yet
- The Accord On Fire and Building SafetyDocument4 pagesThe Accord On Fire and Building SafetyMashrur RahmanNo ratings yet
- Workshop Week 4 PDFDocument4 pagesWorkshop Week 4 PDFStevenRNo ratings yet
- Passive filter design fundamentalsDocument9 pagesPassive filter design fundamentalsH3C2No ratings yet
- YBS ElevatorCables PDFDocument4 pagesYBS ElevatorCables PDFYBS CablesNo ratings yet
- PratinDocument11 pagesPratinPrashant ChoudriNo ratings yet
- GSC400 Series: Automatic Gen-Set Controller ManualDocument105 pagesGSC400 Series: Automatic Gen-Set Controller ManualLuis DerasNo ratings yet
- FOR Approval Specification: 42.0" Wuxga TFT LCD TitleDocument35 pagesFOR Approval Specification: 42.0" Wuxga TFT LCD TitleWalter Petracca100% (1)
- Simulation of 3 Phase Inverter and AC-DC ConverterDocument11 pagesSimulation of 3 Phase Inverter and AC-DC ConverterSoumiya SrinivasanNo ratings yet
- G GM M: GM-4 Product Information Damper ActuatorsDocument15 pagesG GM M: GM-4 Product Information Damper ActuatorsLucasRafaelNo ratings yet
- LG Oled65g6p T-Con Board Layout Voltages 2017Document10 pagesLG Oled65g6p T-Con Board Layout Voltages 2017Fernando AguiarNo ratings yet
- Wavepro LT Busway Cost Effective Solution For Electrical DistributionDocument30 pagesWavepro LT Busway Cost Effective Solution For Electrical DistributionPravin HonmuteNo ratings yet
- EPD Lab#9Document8 pagesEPD Lab#9Muhammad ShaheerNo ratings yet
- Analog Circuit Fundamentals: BJT and FET CharacteristicsDocument43 pagesAnalog Circuit Fundamentals: BJT and FET CharacteristicsjoserxNo ratings yet
- Ltspice Tutorial: ObjectivesDocument22 pagesLtspice Tutorial: ObjectivesMd Kafiul IslamNo ratings yet
- FlipflopsDocument80 pagesFlipflopsvikramkolanuNo ratings yet
- Machine Experiment 1Document7 pagesMachine Experiment 1Ujin MalabananNo ratings yet
- SENSORSDocument31 pagesSENSORSKenani SaningaNo ratings yet
- Dsre - M 2016Document120 pagesDsre - M 2016Mohit KohliNo ratings yet
- Mobile Robot Chapter 7: The Motors of The Robot (V.4a)Document18 pagesMobile Robot Chapter 7: The Motors of The Robot (V.4a)Carlos RamirezNo ratings yet
- OLRDocument3 pagesOLRMazhar SaqlainNo ratings yet
- EEE-Autonomous SyllabusDocument257 pagesEEE-Autonomous Syllabusvamsi krishnaNo ratings yet
- Bell PDFDocument8 pagesBell PDFlibraryNo ratings yet
- MiCOM P44XDocument8 pagesMiCOM P44XMahesh YadaNo ratings yet
- F-27201 (DuraDrive Globe Valve Product Guide)Document36 pagesF-27201 (DuraDrive Globe Valve Product Guide)NATHANNo ratings yet
- 11kv 200a Ab Switch PDFDocument2 pages11kv 200a Ab Switch PDFhimanshuNo ratings yet
- Ad Notam Display Frame Unit: Product HighlightsDocument5 pagesAd Notam Display Frame Unit: Product HighlightsVishal SuryawaniNo ratings yet
- Ingenium (Abstract)Document5 pagesIngenium (Abstract)urvish_soniNo ratings yet