You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- A3953 DatasheetDocument12 pagesA3953 DatasheetMohan RajNo ratings yet
- A3953 Datasheet PDFDocument12 pagesA3953 Datasheet PDFfelres87No ratings yet
- A4954 DatasheetDocument9 pagesA4954 DatasheetAngly1959No ratings yet
- A3930 1 Datasheet PDFDocument21 pagesA3930 1 Datasheet PDFKaan GünayNo ratings yet
- Microstepping DMOS Driver With Translator: Description Features and BenefitsDocument18 pagesMicrostepping DMOS Driver With Translator: Description Features and BenefitsSaid BoubkerNo ratings yet
- A4935 Datasheet PDFDocument25 pagesA4935 Datasheet PDFRyan DelaneyNo ratings yet
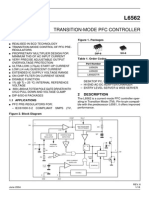
- Transition-Mode PFC Controller: 1 FeaturesDocument17 pagesTransition-Mode PFC Controller: 1 Featuresadriancho66No ratings yet
- MC34063AMDocument16 pagesMC34063AMSajjad4434No ratings yet
- UC2842B/3B/4B/5B UC3842B/3B/4B/5B: High Performance Current Mode PWM ControllerDocument15 pagesUC2842B/3B/4B/5B UC3842B/3B/4B/5B: High Performance Current Mode PWM ControllertoajuiceNo ratings yet
- Document - SG3525A DDocument10 pagesDocument - SG3525A Donlinerahul823405No ratings yet
- Datasheet STR 6757Document11 pagesDatasheet STR 6757Walter CarreroNo ratings yet
- LTC 1625Document24 pagesLTC 1625Sakura KunNo ratings yet
- SG3525A Pulse Width Modulator Control Circuit: 1% and The ErrorDocument10 pagesSG3525A Pulse Width Modulator Control Circuit: 1% and The ErrorJayesh SuryavanshiNo ratings yet
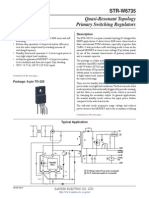
- Quasi-Resonant Topology Primary Switching Regulators: STR-W6735Document13 pagesQuasi-Resonant Topology Primary Switching Regulators: STR-W6735perro sNo ratings yet
- 1/2/3-Phase Quick-PWM IMVP-6.5 VID Controllers: General Description FeaturesDocument39 pages1/2/3-Phase Quick-PWM IMVP-6.5 VID Controllers: General Description FeaturesSunil SuwarnkarNo ratings yet
- STR W6735Document14 pagesSTR W6735proctepNo ratings yet
- Data Sheet: IC Timers 555 and 556Document8 pagesData Sheet: IC Timers 555 and 556Adenilson MatiasNo ratings yet
- NCP1337 PWM Current Mode Controller For Free Running Quasi Resonant OperationDocument14 pagesNCP1337 PWM Current Mode Controller For Free Running Quasi Resonant Operationcorrales_86No ratings yet
- LT 3693Document24 pagesLT 3693Zoltán BaranyaiNo ratings yet
- Dse STR A6000mDocument13 pagesDse STR A6000mAlanNo ratings yet
- Obsolete Product(s) - Obsolete Product(s) : Control Circuit For Switch Mode Power Supplies Using Mos TransistorsDocument7 pagesObsolete Product(s) - Obsolete Product(s) : Control Circuit For Switch Mode Power Supplies Using Mos Transistorsbookreader1968No ratings yet
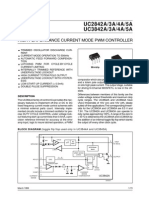
- UC2842A/3A/4A/5A UC3842A/3A/4A/5A: High Performance Current Mode PWM ControllerDocument16 pagesUC2842A/3A/4A/5A UC3842A/3A/4A/5A: High Performance Current Mode PWM ControllerCortés BernaNo ratings yet
- UC3845ANDocument15 pagesUC3845ANMiloud ChouguiNo ratings yet
- Uc 3909Document14 pagesUc 3909Amarnath M DamodaranNo ratings yet
- PWM Off-Line Switching Regulator Ics: Str-A6000H SeriesDocument13 pagesPWM Off-Line Switching Regulator Ics: Str-A6000H SeriesAnonymous Lfgk6vygNo ratings yet
- Datasheet PDFDocument15 pagesDatasheet PDFperro sNo ratings yet
- 161 20551 0 FS7M0880Document16 pages161 20551 0 FS7M0880Edwin Vitovis TorresNo ratings yet
- Quasi-Resonant Topology Primary Switching Regulators: STR-W6756Document8 pagesQuasi-Resonant Topology Primary Switching Regulators: STR-W6756perro sNo ratings yet
- STRW6252Document15 pagesSTRW6252miltoncgNo ratings yet
- SSC2001S Application NoteDocument18 pagesSSC2001S Application NoteGerardo Mendez CamarilloNo ratings yet
- Uc2577 AdjDocument14 pagesUc2577 AdjChandranoola RajuNo ratings yet
- Iramx 16 Up 60 ADocument17 pagesIramx 16 Up 60 AJandfor Tansfg ErrottNo ratings yet
- L 6565Document17 pagesL 6565tatatabuchoNo ratings yet
- MC34060ADocument16 pagesMC34060AJoão GranemanNo ratings yet
- ACS756 DatasheetDocument11 pagesACS756 Datasheetbinhtb14No ratings yet
- Uc3842b 3843BDocument10 pagesUc3842b 3843Bbob75No ratings yet
- 04 Spec Sheet PWM Controller ChipDocument16 pages04 Spec Sheet PWM Controller Chipxuanhiendk2No ratings yet
- LM393Document6 pagesLM393Joao EfremNo ratings yet
- Ltc1629/Ltc1629-Pg Polyphase, High Efficiency, Synchronous Step-Down Switching RegulatorsDocument28 pagesLtc1629/Ltc1629-Pg Polyphase, High Efficiency, Synchronous Step-Down Switching Regulatorscatsoithahuong84No ratings yet
- A3910 DatasheetDocument7 pagesA3910 DatasheetLêĐìnhDanhNo ratings yet
- STR W6735 DatasheetDocument13 pagesSTR W6735 DatasheetloagerNo ratings yet
- Ap5002 - PWM Control 2a Step-Down ConverterDocument10 pagesAp5002 - PWM Control 2a Step-Down ConverterAmador Garcia IIINo ratings yet
- CA3140Document20 pagesCA3140Brzata PticaNo ratings yet
- LMC555 CMOS Timer: General Description FeaturesDocument10 pagesLMC555 CMOS Timer: General Description FeaturesJeremy ObriotNo ratings yet
- Chip Ca3098eDocument12 pagesChip Ca3098etopogigio240No ratings yet
- LM2596 LM2596 SIMPLE SWITCHER Power Converter 150 kHz3A Step-Down Voltage RegulatorDocument33 pagesLM2596 LM2596 SIMPLE SWITCHER Power Converter 150 kHz3A Step-Down Voltage RegulatorFremont Navarro GottliebNo ratings yet
- DatasheetDocument12 pagesDatasheetDjalma MoreiraNo ratings yet
- P1027P65 (SMPS)Document30 pagesP1027P65 (SMPS)Jesus Silva67% (3)
- CM6800GIPDocument18 pagesCM6800GIPAndré Frota PaivaNo ratings yet
- ST3232 Data SheetDocument12 pagesST3232 Data SheetcredioNo ratings yet
- Lm555 555c TimerDocument12 pagesLm555 555c TimerAlexis Orellana VediaNo ratings yet
- Uc 3854Document12 pagesUc 3854Leandro CoradiNo ratings yet
- 3000W Single Output Power Supply Spec SheetDocument6 pages3000W Single Output Power Supply Spec SheetGrigoriu CodrutaNo ratings yet
- Fan 7314Document14 pagesFan 7314Kamal NonekNo ratings yet
- STR W6753 DatasheetDocument8 pagesSTR W6753 DatasheetjgerabmNo ratings yet
- 2n7000 PDFDocument7 pages2n7000 PDFNuraniIndahSNo ratings yet
- T BJT - TIP41C - TIP42C - Power - BJTs (Sonder Pinout)Document4 pagesT BJT - TIP41C - TIP42C - Power - BJTs (Sonder Pinout)Ludwig SchmidtNo ratings yet
- T BJT PNP - 2n4403Document7 pagesT BJT PNP - 2n4403Ludwig SchmidtNo ratings yet
- Tl-wr1043nd v1 User GuideDocument124 pagesTl-wr1043nd v1 User GuideroblasarNo ratings yet
- T BJT - Tip41 - Tip42 (Met Pinout)Document4 pagesT BJT - Tip41 - Tip42 (Met Pinout)Ludwig SchmidtNo ratings yet
- SOUND CARD - Sblive24 Sound Blaster Live! 24-Bit ExternalDocument2 pagesSOUND CARD - Sblive24 Sound Blaster Live! 24-Bit ExternalLudwig SchmidtNo ratings yet
- Transistor NPN 2n222aDocument8 pagesTransistor NPN 2n222aRoberto Eduardo Tenorio RamosNo ratings yet
- BF245BDocument4 pagesBF245BilanigalNo ratings yet
- Reg - LM2931Document18 pagesReg - LM2931Ludwig SchmidtNo ratings yet
- Sound Card - Emagic A 62 enDocument84 pagesSound Card - Emagic A 62 enLudwig SchmidtNo ratings yet
- Switch Tact Mic B1736 ++ Me249-020Document1 pageSwitch Tact Mic B1736 ++ Me249-020Ludwig SchmidtNo ratings yet
- T Fet N - Bf245a-B-c - 2 - PhilipsDocument12 pagesT Fet N - Bf245a-B-c - 2 - PhilipsLudwig SchmidtNo ratings yet
- Router Wlan Gbit Tl-wr1043nd - v1 - DatasheetDocument3 pagesRouter Wlan Gbit Tl-wr1043nd - v1 - DatasheetLudwig SchmidtNo ratings yet
- OpAmp - MCP6244Document38 pagesOpAmp - MCP6244Ludwig SchmidtNo ratings yet
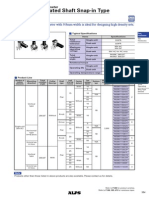
- R POT - Insulated Shaft Potentiometer RK09K+RK09D Series - 0900766b80f4c571Document7 pagesR POT - Insulated Shaft Potentiometer RK09K+RK09D Series - 0900766b80f4c571Ludwig SchmidtNo ratings yet
- PLUG DC Mantech Connectors ME249-098Document1 pagePLUG DC Mantech Connectors ME249-098Ludwig SchmidtNo ratings yet
- OpAmp - LM308AN - National Semiconductor - 49173 - DSDocument9 pagesOpAmp - LM308AN - National Semiconductor - 49173 - DSLudwig SchmidtNo ratings yet
- Sound Card - Sound Blaster X-Fi Sb0679 Rev1.0Document5 pagesSound Card - Sound Blaster X-Fi Sb0679 Rev1.0Ludwig SchmidtNo ratings yet
- Optical Distance Sensor - GP2Y0D810Z0F Gp2y0d810z - eDocument9 pagesOptical Distance Sensor - GP2Y0D810Z0F Gp2y0d810z - eLudwig SchmidtNo ratings yet
- PICkit 3 User Guide 51795ADocument98 pagesPICkit 3 User Guide 51795AJack Liddle100% (1)
- MC78XX/LM78XX/MC78XXA: 3-Terminal 1A Positive Voltage RegulatorDocument28 pagesMC78XX/LM78XX/MC78XXA: 3-Terminal 1A Positive Voltage Regulatorapi-19786583No ratings yet
- LM318HDocument19 pagesLM318HAlberto MarsicoNo ratings yet
- OpAmp - LF12741 - NatSemDocument13 pagesOpAmp - LF12741 - NatSemLudwig SchmidtNo ratings yet
- OpAmp - MCP6241Document28 pagesOpAmp - MCP6241Ludwig SchmidtNo ratings yet
- OpAmp - LF12741 - NatSemDocument13 pagesOpAmp - LF12741 - NatSemLudwig SchmidtNo ratings yet
- LM101ADocument20 pagesLM101AAna MelendezNo ratings yet
- Amplifiers and ComparatorsDocument11 pagesAmplifiers and Comparatorshoang_tuanNo ratings yet
- LM124/LM224/LM324/LM2902 Low Power Quad Operational AmplifiersDocument21 pagesLM124/LM224/LM324/LM2902 Low Power Quad Operational Amplifiersapple.scotch.fool3550No ratings yet
- OpAmp - LF451Document8 pagesOpAmp - LF451Ludwig SchmidtNo ratings yet
- LF 353 NDocument15 pagesLF 353 NivrajkireNo ratings yet
- How Do Adcs Work?: Back PrintDocument5 pagesHow Do Adcs Work?: Back Printmilostar6No ratings yet
- Ob3350 Inverter ControlDocument10 pagesOb3350 Inverter ControlsorintvrNo ratings yet
- AD9364 Register Map Reference Manual UG-672Document72 pagesAD9364 Register Map Reference Manual UG-672sivar22No ratings yet
- Vardhaman College of Engineering B.Tech VI Semester Supplementary Examinations, Nov/Dec - 2017Document12 pagesVardhaman College of Engineering B.Tech VI Semester Supplementary Examinations, Nov/Dec - 2017Kiran Kumar NallamekalaNo ratings yet
- Sponsored by:I!J Texas InstrumentsDocument697 pagesSponsored by:I!J Texas Instrumentsvasilebora100% (2)
- Pulse Modulation Techniques ExplainedDocument34 pagesPulse Modulation Techniques ExplainedMd. Mamun Hossan 31No ratings yet
- Power Rectifier ASIC ControllerDocument5 pagesPower Rectifier ASIC ControllerQuang TaNo ratings yet
- Datasheet A3967Document16 pagesDatasheet A3967Martim BouflerNo ratings yet
- Fuente Atx Sg6105Document10 pagesFuente Atx Sg6105qfacuNo ratings yet
- MC34063ADocument8 pagesMC34063ADiego MontaltoNo ratings yet
- Ep227 Digital ElectronicsDocument85 pagesEp227 Digital ElectronicsPECMURUGANNo ratings yet
- RC MessagesDocument292 pagesRC MessagesKrish Gokul0% (1)
- Tutorial Simcoupler ModuleDocument10 pagesTutorial Simcoupler ModuleMuhammad Nur SururiNo ratings yet
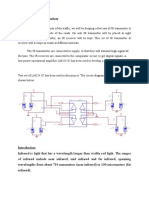
- IR TX RXDocument4 pagesIR TX RXBhaskar Rao PNo ratings yet
- Williams 06 - 1995 - EDN - A Designer's Guide To Innovative Linear CircuitsDocument180 pagesWilliams 06 - 1995 - EDN - A Designer's Guide To Innovative Linear CircuitsBenMohamedNo ratings yet
- 13.56Mhz Rfid Transceiver: This Datasheet Has Been Downloaded From at ThisDocument26 pages13.56Mhz Rfid Transceiver: This Datasheet Has Been Downloaded From at ThisИрена ДимоваNo ratings yet
- NCP1380 Quasi-Resonant Current-Mode Controller For High-Power Universal Off-Line SuppliesDocument26 pagesNCP1380 Quasi-Resonant Current-Mode Controller For High-Power Universal Off-Line SupplieszokiNo ratings yet
- Kasturba Institute of Technology: Minor ProjectDocument15 pagesKasturba Institute of Technology: Minor ProjectRiya KumariNo ratings yet
- 2-Phase Stepper Motor Driver: DescriptionDocument9 pages2-Phase Stepper Motor Driver: Descriptiondanielu79No ratings yet
- HT66FU30Document259 pagesHT66FU30Duc VuNo ratings yet
- Richtek RT7247ADocument15 pagesRichtek RT7247Ajhg-crackmeNo ratings yet
- Digital Electronics Practical Questions GuideDocument4 pagesDigital Electronics Practical Questions GuideVinod JagdaleNo ratings yet
- Ucc 3626Document23 pagesUcc 3626Service ServexmotionNo ratings yet
- AD9834Document36 pagesAD9834fred7106No ratings yet
- 1.5A Step-Down/Step-Up/Inverting DC-DC Converter Az34063UDocument14 pages1.5A Step-Down/Step-Up/Inverting DC-DC Converter Az34063UProducciones3NNo ratings yet
- Fluke 78 Service ManualDocument64 pagesFluke 78 Service ManualjosklxNo ratings yet
- ADM705 ADM706 ADM707 ADM708: Low Cost Microprocessor Supervisory CircuitsDocument12 pagesADM705 ADM706 ADM707 ADM708: Low Cost Microprocessor Supervisory CircuitsNicolae FeraruNo ratings yet
- S8209a e PDFDocument27 pagesS8209a e PDFkarkeraNo ratings yet
- Design Compiler and Physical Compiler MultivoltageDocument133 pagesDesign Compiler and Physical Compiler MultivoltageYongwoo KimNo ratings yet