You might also like
- PIC USB tutorial - Build a USB thermometerDocument12 pagesPIC USB tutorial - Build a USB thermometerJuan Gil RocaNo ratings yet
- Curso Pic24j60Document173 pagesCurso Pic24j60Diojan Torres100% (1)
- Premium EmbeddedDocument61 pagesPremium EmbeddedthehickNo ratings yet
- Experiment Number 1 Design of An Eight Bit Latch: Xess CorporationDocument10 pagesExperiment Number 1 Design of An Eight Bit Latch: Xess CorporationRuben DiazNo ratings yet
- Microchip dsPIC30F2020 SMPS DatasheetDocument286 pagesMicrochip dsPIC30F2020 SMPS DatasheetMarlon MoscosoNo ratings yet
- How To Build A USB Device With A PIC 18F4550 or 18F2550Document12 pagesHow To Build A USB Device With A PIC 18F4550 or 18F2550Adenilson Pipino100% (1)
- Testing The PIC Microcontroller (Pic 16F877A)Document6 pagesTesting The PIC Microcontroller (Pic 16F877A)Matt ImriNo ratings yet
- LTC4416-1 Flyback Controller BoardDocument1 pageLTC4416-1 Flyback Controller BoardChandrasegar SubramaniNo ratings yet
- LPC2148 EbookDocument89 pagesLPC2148 Ebookkarthikeyan_mani1987No ratings yet
- 3-Wire LCD Driver For CCS PIC C CompilerDocument6 pages3-Wire LCD Driver For CCS PIC C CompilerJonathan LazoNo ratings yet
- LCD 16X2 AsmDocument20 pagesLCD 16X2 AsmEduardo FP100% (1)
- PIC Tutorial 1-2-3-4-5-6Document113 pagesPIC Tutorial 1-2-3-4-5-6Phúc Vũ Viết PhúcNo ratings yet
- T89C51 Training Board Manual GuideDocument44 pagesT89C51 Training Board Manual GuidedavidegrimaNo ratings yet
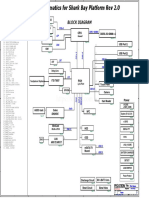
- VGS Schematics for Shark Bay Platform Rev 2.0 Block DiagramDocument74 pagesVGS Schematics for Shark Bay Platform Rev 2.0 Block DiagramJulio CaraguayNo ratings yet
- Foxconn H61MXE-K Schematic DiagramDocument46 pagesFoxconn H61MXE-K Schematic DiagramAcomputer NathonNo ratings yet
- 24W04Document2 pages24W04maldomattNo ratings yet
- EDN 0504 SupplementDocument36 pagesEDN 0504 Supplementmcpa-tum100% (2)
- Master 2012Document91 pagesMaster 2012PAUL BALLARTANo ratings yet
- A Simple Usb Oscilloscope For The PCDocument15 pagesA Simple Usb Oscilloscope For The PCJuan Gil Roca100% (1)
- BP080WX7-100 20130805 201702209800Document22 pagesBP080WX7-100 20130805 201702209800godzalli44No ratings yet
- Thank You For Your Interest in Our SchematicsDocument2 pagesThank You For Your Interest in Our SchematicsadyhansoloNo ratings yet
- Lecture 9 USB To PIC Microcontroller InterfaceDocument8 pagesLecture 9 USB To PIC Microcontroller Interfaceaaaa100% (1)
- Compal AAL15 LA-D071P r1.0-1Document64 pagesCompal AAL15 LA-D071P r1.0-1Manishkumar JethvaNo ratings yet
- Ldmicro ChangesDocument4 pagesLdmicro ChangesPandu Milik MuNo ratings yet
- Understanding The Modbus ProtocolDocument7 pagesUnderstanding The Modbus ProtocolAshok Kumar100% (1)
- mcb1700 LAB - Intro - ARM Cortex m3Document22 pagesmcb1700 LAB - Intro - ARM Cortex m3RagulANNo ratings yet
- LPC 2148Document62 pagesLPC 2148Karthikeyan JhkNo ratings yet
- Quick Start With Ccs C CompilerDocument2 pagesQuick Start With Ccs C CompilerJaime BarraganNo ratings yet
- Programming PIC MCU PDFDocument117 pagesProgramming PIC MCU PDFletrongtan00100% (4)
- BK4811B Datasheet V1.2Document37 pagesBK4811B Datasheet V1.2BradMorse50% (2)
- Programming Practices With SimulatorsDocument11 pagesProgramming Practices With Simulatorsarun0% (2)
- Electronic Load and Other Circuit IdeasDocument6 pagesElectronic Load and Other Circuit Ideasanees_172000100% (1)
- Kontron 2 18008-0000-16-0Document2 pagesKontron 2 18008-0000-16-0tystar_21No ratings yet
- PIC TutorialDocument203 pagesPIC TutorialUnwana James0% (1)
- 8051 Microcontroller Programming GuideDocument35 pages8051 Microcontroller Programming GuideHassan Mustafa JamalNo ratings yet
- Solar Charger Made Simple Attiny85Document1 pageSolar Charger Made Simple Attiny85myEbooksNo ratings yet
- DSUB-25P Male Pinout DiagramDocument1 pageDSUB-25P Male Pinout DiagramabnomaloNo ratings yet
- Getting Started With PIC Microcontroller - CCS C Compiler PDFDocument19 pagesGetting Started With PIC Microcontroller - CCS C Compiler PDFNithya100% (2)
- CAN Bus in PSoC Report210Document16 pagesCAN Bus in PSoC Report210Marcos Antonio EstremoteNo ratings yet
- LCD PanelsDocument85 pagesLCD PanelsJim Rich100% (1)
- GPS Neo-6m-V12 SCHDocument1 pageGPS Neo-6m-V12 SCHKwok Chung Chu100% (1)
- TOSHIBA 32AV500U Wiring - DiagramDocument1 pageTOSHIBA 32AV500U Wiring - Diagramdreamyson1983No ratings yet
- PIC Microcontroller, Timer0, Hello World, PIC16F1823Document3 pagesPIC Microcontroller, Timer0, Hello World, PIC16F1823Nolan Manteufel100% (3)
- DVR Firmware UpdateDocument12 pagesDVR Firmware Updatemario_iv1No ratings yet
- 07 - Chapter 3Document58 pages07 - Chapter 3Chibueze EzeokaforNo ratings yet
- PIC PWM ControllerDocument10 pagesPIC PWM Controllerkeitabando100% (2)
- Manual Pluto DataDocument8 pagesManual Pluto DataDouglas RodriguesNo ratings yet
- ALL 02 ManualDocument47 pagesALL 02 ManualmcabreratNo ratings yet
- PIC Microcontroller IntroductionDocument81 pagesPIC Microcontroller Introductionpnlinh2850% (2)
- Ka2206B 2.3W Dual Audio Power Amp: O CC L O CC LDocument4 pagesKa2206B 2.3W Dual Audio Power Amp: O CC L O CC LEdgar Robert DolarNo ratings yet
- Fire Bird Software ManualDocument62 pagesFire Bird Software ManualEyantra_resourcesNo ratings yet
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionFrom EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionNo ratings yet
- Altium Designer Summer 09Document3 pagesAltium Designer Summer 09Ryan LizardoNo ratings yet
- Project Report 1Document7 pagesProject Report 1api-3756512No ratings yet
- Gcbasic PDFDocument799 pagesGcbasic PDFBrian LaiNo ratings yet
- Bootloading The TMS320VC5402 in HPI Mode: Scott Tater DSP Applications - Semiconductor GroupDocument11 pagesBootloading The TMS320VC5402 in HPI Mode: Scott Tater DSP Applications - Semiconductor GroupGigi IonNo ratings yet
- Running An Application From Internal Flash Memory On The TMS320F28xxx DSPDocument38 pagesRunning An Application From Internal Flash Memory On The TMS320F28xxx DSPShelby PerezNo ratings yet
- Programming PIC Microcontrollers in CDocument126 pagesProgramming PIC Microcontrollers in CShomeswaran Mugunthan100% (3)
- H-Jtag User Manual (En)Document96 pagesH-Jtag User Manual (En)Silviu NeniuNo ratings yet
- Altium Designer 13 - ReadmeDocument2 pagesAltium Designer 13 - ReadmeMike EdwardsNo ratings yet
- MacromoleculesDocument6 pagesMacromoleculesRaymondZhangNo ratings yet
- Organic Chemistry Part 1Document6 pagesOrganic Chemistry Part 1RaymondZhangNo ratings yet
- Source Based Question SkillsDocument4 pagesSource Based Question SkillsRaymondZhangNo ratings yet
- Date: - / - / - , - Public Transport Evaluation FormDocument2 pagesDate: - / - / - , - Public Transport Evaluation FormRaymondZhangNo ratings yet
- Date: - / - / - , - Public Transport Evaluation FormDocument2 pagesDate: - / - / - , - Public Transport Evaluation FormRaymondZhangNo ratings yet
- ACJC 2014 H2 Maths Supp Exam (Solution For Students)Document9 pagesACJC 2014 H2 Maths Supp Exam (Solution For Students)RaymondZhangNo ratings yet
- ACJC 2014 H2 Math JC2 Supp QP PaperDocument7 pagesACJC 2014 H2 Math JC2 Supp QP PaperRaymondZhang100% (1)
- Unit 3 Notes PDFDocument68 pagesUnit 3 Notes PDFPadmanaban MNo ratings yet
- COA LAb File-ShubhiDocument28 pagesCOA LAb File-ShubhiKrishan Kant ShuklaNo ratings yet
- QuadSPI STMDocument95 pagesQuadSPI STMGolnaz KorkianNo ratings yet
- Arm Cortex r52 Technical Reference Manual 100026 0102 00 en PDFDocument633 pagesArm Cortex r52 Technical Reference Manual 100026 0102 00 en PDFanomin89No ratings yet
- Microprocessor Chapter 2Document111 pagesMicroprocessor Chapter 2Tigabu YayaNo ratings yet
- Catalogo Modicon M580Document152 pagesCatalogo Modicon M580Aleks ProañoNo ratings yet
- 8085 Notes GoodDocument4 pages8085 Notes GoodLovely AlamgirNo ratings yet
- Zilog Z8000 CPU Reference ManualDocument299 pagesZilog Z8000 CPU Reference ManualNathalie VillemaireNo ratings yet
- UNIT 6 Input-Output-OrganizationDocument25 pagesUNIT 6 Input-Output-OrganizationSaranya Priyanka100% (1)
- 16F54Document90 pages16F54SHAHID_71No ratings yet
- Z 8530 BookDocument28 pagesZ 8530 BookarchankumarturagaNo ratings yet
- Architecture and Programming of 8051 MicrocontrollersDocument294 pagesArchitecture and Programming of 8051 MicrocontrollersRomeu Corradi JúniorNo ratings yet
- pg194 Axi Bridge Pcie Gen3 en Us 3.0Document203 pagespg194 Axi Bridge Pcie Gen3 en Us 3.0Jim JimNo ratings yet
- Brey-The Intel Microprocessors 8EDocument944 pagesBrey-The Intel Microprocessors 8EJulian RNo ratings yet
- Etherlink Ii Adapter Technical Reference Manual: A Member of The Etherlink Product FamilyDocument56 pagesEtherlink Ii Adapter Technical Reference Manual: A Member of The Etherlink Product Familyantonius0990No ratings yet
- 322813Document388 pages322813Surya BabaNo ratings yet
- Microproessor - Microprocessor and Its Components - : Qisthi Al Hazmi HR., S.T., M.TDocument21 pagesMicroproessor - Microprocessor and Its Components - : Qisthi Al Hazmi HR., S.T., M.TChuenk NeutronNo ratings yet
- 02ddmethod PDFDocument46 pages02ddmethod PDFMohammad Mohsen AmiriNo ratings yet
- AT89C52Document3 pagesAT89C52Harish SekaranNo ratings yet
- EC 8791 ERTS 2 MarksDocument24 pagesEC 8791 ERTS 2 Marksdeenandhini b100% (2)
- Design of The Smart Glove To System The Visually ImpairedDocument63 pagesDesign of The Smart Glove To System The Visually ImpairedNexgen TechnologyNo ratings yet
- Training Report of Industrial Interaction in Cetpa Infotech PDFDocument40 pagesTraining Report of Industrial Interaction in Cetpa Infotech PDFmjdj1230% (1)
- C Programming For Embedded SystemsDocument408 pagesC Programming For Embedded SystemsBiju Kuttan100% (1)
- Input Output InterfaceDocument10 pagesInput Output InterfaceHarsh JainNo ratings yet
- Line Follower RobotDocument30 pagesLine Follower RobotNeetu Bansal100% (5)
- Ee2354 QBDocument10 pagesEe2354 QByuvigunaNo ratings yet
- DatasheetDocument30 pagesDatasheetMarwa BoukediNo ratings yet
- dsk6416 TechRefDocument56 pagesdsk6416 TechRefAizaz Hussain ShahNo ratings yet
- Lecture 1Document24 pagesLecture 1loverboy_86No ratings yet
- Elevator Control Logic DesignDocument80 pagesElevator Control Logic DesignMohammed SajidNo ratings yet