You might also like
- Formación de Profesores Universitarios Un Diagnóstico de Necesid PDFDocument188 pagesFormación de Profesores Universitarios Un Diagnóstico de Necesid PDFLEONARDO MORENO COLLAZOSNo ratings yet
- Plantilla Unidad Didáctica CCDocument4 pagesPlantilla Unidad Didáctica CCLESTAD871No ratings yet
- Redes Sociales y EducacionDocument3 pagesRedes Sociales y EducacionYais De RieraNo ratings yet
- Actividad Nº03 - CircuitoElectricosDocument14 pagesActividad Nº03 - CircuitoElectricosJuana magdalena Gil perezNo ratings yet
- Los Valores Sociales Del Ser Costarricense Que Deben Fomentase en El Proceso Educativo Como Componentes Del Contenido Curricular de Los Programas y MateriasDocument6 pagesLos Valores Sociales Del Ser Costarricense Que Deben Fomentase en El Proceso Educativo Como Componentes Del Contenido Curricular de Los Programas y MateriasYari AlfaroNo ratings yet
- Nuevas Tecnologias-NticxDocument39 pagesNuevas Tecnologias-NticxclaudiaecasariegoNo ratings yet
- Diplomado en Diseño Didáctico InstruccionalDocument2 pagesDiplomado en Diseño Didáctico InstruccionalJuan Jose Jimenez MogollonNo ratings yet
- Diseño Curricular Diversificado Del Area de CienciaDocument2 pagesDiseño Curricular Diversificado Del Area de CienciaLucio Rojas VitorNo ratings yet
- Latch y flip-flop: Análisis de circuitos con NE555, 74LS02 y TTL7473Document9 pagesLatch y flip-flop: Análisis de circuitos con NE555, 74LS02 y TTL7473franz barraNo ratings yet
- Reingeniería MOODLE UPACHDocument3 pagesReingeniería MOODLE UPACHSamuelMendezNo ratings yet
- Diseño y Validez de Indicadores para Evaluar El Plan de EstudiosDocument11 pagesDiseño y Validez de Indicadores para Evaluar El Plan de Estudios印露露No ratings yet
- Diseño Escuelas TecnicasDocument322 pagesDiseño Escuelas TecnicasAdrian NticxNo ratings yet
- Ciencia Tecnologia y SociedadDocument9 pagesCiencia Tecnologia y SociedadJember AdolfoNo ratings yet
- Atlas Ti y N ViVo 10Document18 pagesAtlas Ti y N ViVo 10Pato Paredes100% (1)
- Ciencia-Tecnologia-Victor-Morles-Lec 2 PDFDocument15 pagesCiencia-Tecnologia-Victor-Morles-Lec 2 PDFmarguah4237No ratings yet
- Plan de Gestion I.E. 19 de MarzoDocument13 pagesPlan de Gestion I.E. 19 de Marzoomurexe123No ratings yet
- Los entornos informáticos educativos enDocument23 pagesLos entornos informáticos educativos enBrayan GarcíaNo ratings yet
- Los Métodos Didácticos o Lógicos en El Proceso de AprendizajeDocument18 pagesLos Métodos Didácticos o Lógicos en El Proceso de AprendizajeFaviola BertrezNo ratings yet
- Guia de Actividades - Fase 1 - Análisis Del Pensamiento ComplejoDocument6 pagesGuia de Actividades - Fase 1 - Análisis Del Pensamiento ComplejoMariel Dayana Barrios BarriosNo ratings yet
- AIP de Institución EducativaDocument6 pagesAIP de Institución EducativajamimcolNo ratings yet
- Didáctica para La Enseñanza en La Sociedad DigitalDocument8 pagesDidáctica para La Enseñanza en La Sociedad DigitalNestor Almanza KmlsNo ratings yet
- Instalaciones Electricas Residenciles 832221 v2Document21 pagesInstalaciones Electricas Residenciles 832221 v2CATERINE2013No ratings yet
- Lectura Integrada de Los Ejes de Los Nap Edutec - Ferreras-SandroneDocument7 pagesLectura Integrada de Los Ejes de Los Nap Edutec - Ferreras-SandroneDaniel RicharNo ratings yet
- Diseño CurricularDocument10 pagesDiseño CurricularLucia MartinezNo ratings yet
- Redes y Transmisión de Datos UNSMDocument4 pagesRedes y Transmisión de Datos UNSMXDark GhoztxNo ratings yet
- 1 Ciencia Tecnologia y SociedadDocument18 pages1 Ciencia Tecnologia y SociedadBeto QeyarNo ratings yet
- Presentacion Matriz de CoherenciaDocument13 pagesPresentacion Matriz de CoherenciaDilan ZamoraNo ratings yet
- Evaluación de presentaciones sobre innovación y tecnología en educaciónDocument3 pagesEvaluación de presentaciones sobre innovación y tecnología en educaciónAlberto Salmeron LizaldiNo ratings yet
- Introducción A Los Protocolos de RedDocument3 pagesIntroducción A Los Protocolos de RedArianne SierraNo ratings yet
- Tarea 3 Informatica AplicadaDocument3 pagesTarea 3 Informatica AplicadaLari Alejandra YanesNo ratings yet
- Pensamiento CriticoDocument25 pagesPensamiento CriticoMAURICIO MONTANEZ SUNINo ratings yet
- Niveles de Educación en ColombiaDocument10 pagesNiveles de Educación en ColombiaWilliam Fernando RIVAS LEONNo ratings yet
- Reglamento Gestión Academico-Administrativa (UES) (May2013)Document60 pagesReglamento Gestión Academico-Administrativa (UES) (May2013)cegarciaNo ratings yet
- PLE recursos aprendizajeDocument16 pagesPLE recursos aprendizajeHANS MALCOLM RASCH DIAZNo ratings yet
- Topologia de MaquetaDocument7 pagesTopologia de MaquetastefanyNo ratings yet
- Introduccion A La RoboticaDocument48 pagesIntroduccion A La RoboticaSmith SmithNo ratings yet
- Guia Practica de Diagnostico DE 4TO GRUPAL MARIA ANGELICA REYES CARVAJAL.Document7 pagesGuia Practica de Diagnostico DE 4TO GRUPAL MARIA ANGELICA REYES CARVAJAL.Maria Reyes CNo ratings yet
- Marpegan-Leliwa Tecnología y Educación - Cap 4Document30 pagesMarpegan-Leliwa Tecnología y Educación - Cap 4Gabriela Gauna100% (1)
- Teoria General de Sistemas Aplicada A La EducacionDocument3 pagesTeoria General de Sistemas Aplicada A La EducacionAntonio RodNo ratings yet
- Qué Son Las TACDocument1 pageQué Son Las TACLaura MttzNo ratings yet
- La VideoconferenciaDocument12 pagesLa VideoconferenciaJose Manuel AlvarezNo ratings yet
- Modelo AddieDocument11 pagesModelo AddieeusreyNo ratings yet
- Circuitos ElectronicosDocument21 pagesCircuitos Electronicosomar alva suarezNo ratings yet
- Fundamentos Filosoficos de Educacion MatematicaDocument24 pagesFundamentos Filosoficos de Educacion MatematicaFrancisco Gurrola100% (2)
- Conocimiento Especulativo y PracticoDocument3 pagesConocimiento Especulativo y PracticoJuan Ignacio García Gallardo100% (2)
- Informe Final Diseño IDocument17 pagesInforme Final Diseño Ianon_697030576No ratings yet
- ¿Qué Condiciones Deben Reunirse para Dar Lugar A Una Alfabetización Tecnológica? - MC CormickDocument6 pages¿Qué Condiciones Deben Reunirse para Dar Lugar A Una Alfabetización Tecnológica? - MC CormickNatalia AsselleNo ratings yet
- Proyecto IntegradorDocument2 pagesProyecto IntegradorMarco JuarezNo ratings yet
- Módulo 8°Document27 pagesMódulo 8°DomingoCallejasVegaNo ratings yet
- Formato - Sílabo - Istsb - 2020 - Rediseño - Analisis Matematico - Rene VillacisDocument40 pagesFormato - Sílabo - Istsb - 2020 - Rediseño - Analisis Matematico - Rene VillacisVILLACIS ORQUERA RENE DAVID100% (1)
- ROM CorrientesDocument72 pagesROM CorrientesSebastian RamirezNo ratings yet
- Por Qué Una Ética Profesional en Nuestros TiemposDocument5 pagesPor Qué Una Ética Profesional en Nuestros Tiemposnacho100% (1)
- Reporte de Tesis BetoDocument112 pagesReporte de Tesis BetoCentro Universitario QuevedoNo ratings yet
- Estrategias de enseñanza aprendizajeDocument24 pagesEstrategias de enseñanza aprendizajedannydanna2016No ratings yet
- Introducción YaDocument8 pagesIntroducción YaAlicia MartinezNo ratings yet
- Métodos y Medios de EnseñanzaDocument6 pagesMétodos y Medios de EnseñanzaLeydy Yurbihet Valderrama CNo ratings yet
- Tics en La Escuela PDFDocument10 pagesTics en La Escuela PDFRodolfo SanchezNo ratings yet
- Modelos Pedagógicos para Un Ambiente de Aprendizaje Con NTICDocument19 pagesModelos Pedagógicos para Un Ambiente de Aprendizaje Con NTICChriscaribeNo ratings yet
- Modelo DidácticoDocument42 pagesModelo DidácticoJuanaDavila100% (1)
- Diseño instruccional y sus característicasDocument13 pagesDiseño instruccional y sus característicasMiguelónHernández100% (2)
- Volver A Casa. Hermeneutica de La Propia Vida Desde LC 15,11-32 Definitivo PujDocument184 pagesVolver A Casa. Hermeneutica de La Propia Vida Desde LC 15,11-32 Definitivo PujXimena Fajardo100% (1)
- Poniendo Horarios y Límites en El HogarDocument3 pagesPoniendo Horarios y Límites en El HogarXimena FajardoNo ratings yet
- Una Historia de Amor PDFDocument2 pagesUna Historia de Amor PDFXimena FajardoNo ratings yet
- Juegos AdolescentesDocument12 pagesJuegos AdolescentesvagologiNo ratings yet
- TESISDocument99 pagesTESISXimena FajardoNo ratings yet
- Libro 1Document1 pageLibro 1Ximena FajardoNo ratings yet
- Plan de Negocio para Crear Una Empresa de Cunícola en La Ciudad DDocument158 pagesPlan de Negocio para Crear Una Empresa de Cunícola en La Ciudad DXimena FajardoNo ratings yet
- Educaciòn en Casa Y Creatividad 1Document165 pagesEducaciòn en Casa Y Creatividad 1Juan Carlos HernándezNo ratings yet
- La Biblia y Sus NumerosDocument3 pagesLa Biblia y Sus NumerosjlpeteneroNo ratings yet
- Willy Dimtom y Sus AventurasDocument3 pagesWilly Dimtom y Sus AventurasXimena FajardoNo ratings yet
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Parte 6 Programación Lineal Método SimplexDocument28 pagesParte 6 Programación Lineal Método Simplexcmpunk_01No ratings yet
- Capitulo 3 CRITERIOS BÁSICOS DE DISEÑODocument123 pagesCapitulo 3 CRITERIOS BÁSICOS DE DISEÑOSandra Milena Quintana SaavedraNo ratings yet
- Abel ZabalaDocument17 pagesAbel ZabalaDorcas Abigail Vásquez BecerraNo ratings yet
- Listo+para+nuestro+Encuentro - Abel Zavala PDFDocument22 pagesListo+para+nuestro+Encuentro - Abel Zavala PDFchelabassNo ratings yet
- Abel ZabalaDocument17 pagesAbel ZabalaDorcas Abigail Vásquez BecerraNo ratings yet
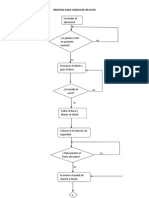
- Diagrama de Flujo de ConduccionDocument2 pagesDiagrama de Flujo de ConduccionXimena Fajardo70% (10)
- Cancionero - Abel Zabala - Jesus Mi Fiel Amigo PDFDocument9 pagesCancionero - Abel Zabala - Jesus Mi Fiel Amigo PDFJuan Banesta100% (1)
- Taller 1Document1 pageTaller 1Ximena FajardoNo ratings yet
- Taller 1Document1 pageTaller 1Ximena FajardoNo ratings yet
- Archicad Comandos EspanolDocument114 pagesArchicad Comandos EspanolJuan Villanueva100% (2)
- Proyecto HotelDocument2 pagesProyecto HotelXimena FajardoNo ratings yet
- Autocad 3D DiemsionesDocument8 pagesAutocad 3D DiemsionesAnonymous Kvm4KxY4No ratings yet
- Proyecto HotelDocument2 pagesProyecto HotelXimena FajardoNo ratings yet
- 50 Trucos de Google PDFDocument16 pages50 Trucos de Google PDFchinoe88No ratings yet
- Actividad Autocad3d Sem3Document1 pageActividad Autocad3d Sem3Ximena FajardoNo ratings yet
- Proyecto HotelDocument2 pagesProyecto HotelXimena FajardoNo ratings yet
- Ejercicios Con ExcelDocument2 pagesEjercicios Con ExcelXimena FajardoNo ratings yet
- 34 AlimentosDocument6 pages34 AlimentosFREDDY SALINAS MEJIANo ratings yet
- Sindrome de WilliamsDocument12 pagesSindrome de WilliamsJessiica AlejandraNo ratings yet
- Oscar Res. 19Document2 pagesOscar Res. 19FRANCO GOMERONo ratings yet
- COMUNICACIONDocument5 pagesCOMUNICACIONUlises Angulo Burgos100% (1)
- 25 Pensamientos de Torá y Cabalá XXVDocument2 pages25 Pensamientos de Torá y Cabalá XXVYosef Ben ShuljanNo ratings yet
- 09 Creacion de Sobres y Etiquetas Individuales y Sobres Etiquetas y Documentos Modelo para Creacion y Envio MasivoDocument12 pages09 Creacion de Sobres y Etiquetas Individuales y Sobres Etiquetas y Documentos Modelo para Creacion y Envio Masivohernan andres toro jaramilloNo ratings yet
- Estas Vestido Con Poder Paul WasherDocument4 pagesEstas Vestido Con Poder Paul WasherEmanuelContrerasNo ratings yet
- Venta Inmueble Tarija 40m2Document3 pagesVenta Inmueble Tarija 40m2Shary Pamela Cornejo AizaNo ratings yet
- Tratamiento de FisurasDocument10 pagesTratamiento de FisurasJavier LeonNo ratings yet
- Documento 1 Documental y FicciónDocument3 pagesDocumento 1 Documental y FicciónSofía Florez GaviriaNo ratings yet
- Pdot 2030 Santo DomingoDocument455 pagesPdot 2030 Santo DomingoSandro MoreiraNo ratings yet
- Boletines de Problemas 20 21Document24 pagesBoletines de Problemas 20 21gatuso123No ratings yet
- Tarea2 CamiloGuzmanDocument19 pagesTarea2 CamiloGuzmanCAMILO ANDRES GUZMAN AMOROCHONo ratings yet
- Guillermo Briones HipótesisDocument3 pagesGuillermo Briones HipótesisMailen MastrandreaNo ratings yet
- Luces Testigo Del Volkswagen Jetta - OpinautosDocument6 pagesLuces Testigo Del Volkswagen Jetta - OpinautosLaura Rivera EscalanteNo ratings yet
- Hernandez Ramos Luis Enrique - Mariposa MonarcaDocument40 pagesHernandez Ramos Luis Enrique - Mariposa MonarcaInocencia PalominoNo ratings yet
- 20-Patrick IberDocument54 pages20-Patrick Ibermarciagonzalez81No ratings yet
- Misa Comunitaria-3 VocesDocument8 pagesMisa Comunitaria-3 VocesMariaFelixVillanuevaNo ratings yet
- Conciencia & Psicología Transpersonal EDITARDocument11 pagesConciencia & Psicología Transpersonal EDITARPepona Pepita Pepi100% (1)
- EJEMPLO DE CARTILLA DE EVALUACION 1,2,3 GradoDocument9 pagesEJEMPLO DE CARTILLA DE EVALUACION 1,2,3 GradoEduardo VazquezNo ratings yet
- Esan - PEE - Gestià N de Créditos y Cobranzas - Caso PCGADocument3 pagesEsan - PEE - Gestià N de Créditos y Cobranzas - Caso PCGAEstefany Ramirez MezaNo ratings yet
- Ficha Técnica T-CrossDocument2 pagesFicha Técnica T-CrossNico AraqueNo ratings yet
- CooperativasDocument10 pagesCooperativasJosé canizalezNo ratings yet
- CalitividadDocument1 pageCalitividadSelva Fabiola Cajachagua YabarNo ratings yet
- Quinta Practica CAÍDA LIBREDocument7 pagesQuinta Practica CAÍDA LIBREMANUEL EDSON MENESES CATACORANo ratings yet
- Sesion 1 Sistema de Medicion AngularDocument3 pagesSesion 1 Sistema de Medicion AngularLoftuz JaqueNo ratings yet
- Biografía de Medardo Ángel SilvaDocument5 pagesBiografía de Medardo Ángel SilvaDavidGabrielApolinarioSuarez67% (3)
- Informe de Pavimento RigidoDocument18 pagesInforme de Pavimento RigidoDaniela Paola valverde collazosNo ratings yet
- Contexto Del EndomarketingDocument8 pagesContexto Del Endomarketingorozco complementsNo ratings yet
- Departamento de Proyectos Presentacion INTECMECOLDocument4 pagesDepartamento de Proyectos Presentacion INTECMECOLMiguel RomeroNo ratings yet