You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Zener Diode Voltage Regulator Circuit DesignDocument32 pagesZener Diode Voltage Regulator Circuit DesignS.m. FerdousNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Busbar: Energy Storing and Recovering in Power Systems and Hev and EvDocument12 pagesBusbar: Energy Storing and Recovering in Power Systems and Hev and EvS.m. FerdousNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Lesson 5 - Transistor Behaviour and ModelsDocument40 pagesLesson 5 - Transistor Behaviour and ModelsS.m. FerdousNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Lesson 4 - LEDs and PhotodiodesDocument17 pagesLesson 4 - LEDs and PhotodiodesS.m. FerdousNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Comparative Study Between Series Resonant Converter and Parallel Resonant ConverterDocument23 pagesComparative Study Between Series Resonant Converter and Parallel Resonant ConverterS.m. FerdousNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Recent Development in Power Electronic - ContentDocument2 pagesRecent Development in Power Electronic - ContentS.m. FerdousNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
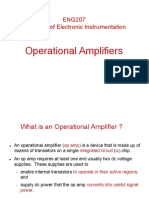
- ENG207 Operational Amplifiers Principles of Electronic InstrumentationDocument38 pagesENG207 Operational Amplifiers Principles of Electronic InstrumentationS.m. FerdousNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Lesson 2 - Simple Diode Models and Circuits - (Presentation - Slides)Document29 pagesLesson 2 - Simple Diode Models and Circuits - (Presentation - Slides)S.m. FerdousNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Lesson 1 - Introduction and Diode ModelsDocument45 pagesLesson 1 - Introduction and Diode ModelsS.m. FerdousNo ratings yet
- Recent Dev in Power Electronic - FinalDocument51 pagesRecent Dev in Power Electronic - FinalS.m. FerdousNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- EmbeddedLab v1.60 RemoteDocsDocument197 pagesEmbeddedLab v1.60 RemoteDocsAshok ObuliNo ratings yet
- FlywheelDocument8 pagesFlywheelS.m. FerdousNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
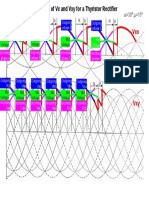
- Thyristor Commutation Animation VxVxyDocument1 pageThyristor Commutation Animation VxVxyS.m. FerdousNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- AIPDocument19 pagesAIPS.m. FerdousNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Accion Control y Aplicacion de Motores ElectricosDocument358 pagesAccion Control y Aplicacion de Motores Electricosnikoll1953No ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Technical Implications of Electric Vehicle (EV) Integration For The Grid, Bulk and Local DistributionDocument16 pagesTechnical Implications of Electric Vehicle (EV) Integration For The Grid, Bulk and Local DistributionS.m. FerdousNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Analog MultipliersDocument5 pagesAnalog MultipliersS.m. FerdousNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- BatteryDocument9 pagesBatteryS.m. FerdousNo ratings yet
- Normallised Parameters: The Parallel Resonant Converter: AnalysisDocument12 pagesNormallised Parameters: The Parallel Resonant Converter: AnalysisS.m. FerdousNo ratings yet
- Current Sources BJTDocument15 pagesCurrent Sources BJTS.m. FerdousNo ratings yet
- The Status of Li-Ion Battery Development For LEV ApplicationsDocument4 pagesThe Status of Li-Ion Battery Development For LEV ApplicationsS.m. FerdousNo ratings yet
- 3.2.3 Flux-Weakening Control Design and Analysis: Semiaxis Because of IDocument13 pages3.2.3 Flux-Weakening Control Design and Analysis: Semiaxis Because of IPierumberto PampaninNo ratings yet
- Chapter 7 ChecklistDocument2 pagesChapter 7 ChecklistS.m. FerdousNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Checklist For Chapter 6: Synchronous MotorsDocument2 pagesChecklist For Chapter 6: Synchronous MotorsS.m. FerdousNo ratings yet
- Checklist For Chapter 1: Introduction To Machinery PrinciplesDocument1 pageChecklist For Chapter 1: Introduction To Machinery PrinciplesS.m. FerdousNo ratings yet
- Chap 1Document21 pagesChap 1S.m. FerdousNo ratings yet
- Quote For MR - Shuvo, American International University BangladeshDocument3 pagesQuote For MR - Shuvo, American International University BangladeshS.m. FerdousNo ratings yet
- Chap 2Document11 pagesChap 2S.m. FerdousNo ratings yet
- Cover PagesDocument12 pagesCover PagesS.m. FerdousNo ratings yet
- Mass Weight DensityDocument29 pagesMass Weight DensityKoh Seok HweeNo ratings yet
- Kater'S Pendulum: By-Saurabh Yadav & Shubham Gupta Kirori Mal College G5 5 GroupDocument12 pagesKater'S Pendulum: By-Saurabh Yadav & Shubham Gupta Kirori Mal College G5 5 GroupSaurabh YadavNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Gravity (Draft) PrudenteDocument16 pagesGravity (Draft) PrudentePatrick James B. PrudenteNo ratings yet
- QuickRWall - Guía de UsuarioDocument51 pagesQuickRWall - Guía de UsuariogchoyNo ratings yet
- Colin M. Hurd Auth., C. L. Chien, C. R. Westgate Eds. The Hall Effect and Its ApplicationsDocument550 pagesColin M. Hurd Auth., C. L. Chien, C. R. Westgate Eds. The Hall Effect and Its Applicationsmordon100% (1)
- Phy Aipmt 2015 QuesDocument6 pagesPhy Aipmt 2015 QuesakalikarNo ratings yet
- Fundamentals of Electrical Circuits-ITSE-1261: Lecture 01: Course Overview, Basic Electric Circuit ConceptsDocument45 pagesFundamentals of Electrical Circuits-ITSE-1261: Lecture 01: Course Overview, Basic Electric Circuit ConceptsKebede Alemu100% (1)
- LUMS Mechanics Course Fall 2018Document3 pagesLUMS Mechanics Course Fall 2018fawaz AhmedNo ratings yet
- Orifice and Jet Flow AppDocument40 pagesOrifice and Jet Flow AppMayuresh ChavanNo ratings yet
- Detailed Lesson Plan in Mapeh 7Document16 pagesDetailed Lesson Plan in Mapeh 7c21-1035-916No ratings yet
- Transient Stability Example 1: ObjectivesDocument7 pagesTransient Stability Example 1: ObjectivesAndres VergaraNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Electric Flux and CurrentDocument5 pagesElectric Flux and CurrentthuniNo ratings yet
- 6n1 SPK Prot Rev 1.2B - With Basic Function How It WorksDocument34 pages6n1 SPK Prot Rev 1.2B - With Basic Function How It Worksអំភ្លី សំលេងNo ratings yet
- Resistive Network AnalysisDocument27 pagesResistive Network AnalysisTanmaysainiNo ratings yet
- Chapter 8 Nature of LightDocument45 pagesChapter 8 Nature of LightjellNo ratings yet
- Exam 02: Chapters 04 and 05: NstructionsDocument7 pagesExam 02: Chapters 04 and 05: NstructionsRonaldcito Eduardo Portocarrero HoyoNo ratings yet
- Electromanitism: Self-Sustaining Portable Generator Through Magnets, Old Speaker, and MotorDocument8 pagesElectromanitism: Self-Sustaining Portable Generator Through Magnets, Old Speaker, and MotorDunhill GuanteroNo ratings yet
- Part One - ElectricalDocument2 pagesPart One - ElectricalMwaniki CharlesNo ratings yet
- Slit Diffraction Technical PaperDocument8 pagesSlit Diffraction Technical PapervinzkeenangoNo ratings yet
- ESPTrouble Shooting GuideDocument65 pagesESPTrouble Shooting Guidesivakscribd67% (3)
- CH 4Document6 pagesCH 4Shaker Ullah ChowdhuryNo ratings yet
- SC3 B2 CompleteDocument255 pagesSC3 B2 CompletePankaj Singh KushwahNo ratings yet
- TWI Ultrasonic Inspection Coursework 5Document2 pagesTWI Ultrasonic Inspection Coursework 5HassanSobohNo ratings yet
- Mock Test - 1: (Physics)Document29 pagesMock Test - 1: (Physics)kalloliNo ratings yet
- Constant Voltage Constant Frequency Operation For A Self-Excited Induction GeneratorDocument7 pagesConstant Voltage Constant Frequency Operation For A Self-Excited Induction GeneratorAnkita AroraNo ratings yet
- MIT520 5kV Digital Insulation Tester User ManualDocument22 pagesMIT520 5kV Digital Insulation Tester User Manualwuriokta100% (1)
- Tutorial 4 Work and ENERGYDocument5 pagesTutorial 4 Work and ENERGYjumanneshambiNo ratings yet
- Irrigation Engineering and Hydraulic Structure Santosh Kumar GargDocument165 pagesIrrigation Engineering and Hydraulic Structure Santosh Kumar GargAnand RatnaNo ratings yet
- Waves and Imaging Class NotesDocument146 pagesWaves and Imaging Class NotesderpyuniverseNo ratings yet
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 5 out of 5 stars5/5 (8)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (542)
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsFrom EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsRating: 4 out of 5 stars4/5 (1)
- The Rare Metals War: the dark side of clean energy and digital technologiesFrom EverandThe Rare Metals War: the dark side of clean energy and digital technologiesRating: 5 out of 5 stars5/5 (2)
- C++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingFrom EverandC++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingRating: 4 out of 5 stars4/5 (1)
- Off-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemFrom EverandOff-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemNo ratings yet
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4 out of 5 stars4/5 (331)