You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Web p05628 Manual Facility Connect Unificado Rev3Document2 pagesWeb p05628 Manual Facility Connect Unificado Rev3cooldamageNo ratings yet
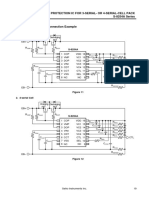
- S-8254A Series: Battery Protection Ic For 3-Serial-Or 4-Serial-Cell PackDocument29 pagesS-8254A Series: Battery Protection Ic For 3-Serial-Or 4-Serial-Cell PackcooldamageNo ratings yet
- DS203 Mini OsciloscopDocument29 pagesDS203 Mini Osciloscopsandro2009No ratings yet
- Battery Firmware Hacking: Inside the InnardsDocument38 pagesBattery Firmware Hacking: Inside the InnardscooldamageNo ratings yet
- Specification: Model No.: CT-3S4S-LIFE Document No.: DM-3S4S-LIFE (Rev. A) Customer.Document9 pagesSpecification: Model No.: CT-3S4S-LIFE Document No.: DM-3S4S-LIFE (Rev. A) Customer.cooldamageNo ratings yet
- Everdrive-64 X7: User ManualDocument12 pagesEverdrive-64 X7: User ManualcooldamageNo ratings yet
- Quick Start Guide Quick Start Guide: Network Viruswall™ Enforcer 1200Document2 pagesQuick Start Guide Quick Start Guide: Network Viruswall™ Enforcer 1200cooldamageNo ratings yet
- Battery Protection Ic For 3-Serial-Or 4-Serial-Cell Pack S-8254A SeriesDocument1 pageBattery Protection Ic For 3-Serial-Or 4-Serial-Cell Pack S-8254A SeriescooldamageNo ratings yet
- Shenzhen Concox Information Technology Co.,Ltd: GPS Tracker Communication ProtocolDocument44 pagesShenzhen Concox Information Technology Co.,Ltd: GPS Tracker Communication ProtocolAldo Aldrino Ail PiresNo ratings yet
- HM Parts List & Wiring DiagramDocument5 pagesHM Parts List & Wiring DiagramcooldamageNo ratings yet
- Downloaded From Manuals Search EngineDocument12 pagesDownloaded From Manuals Search EnginecooldamageNo ratings yet
- Cessna 172 Skyhawk ChecklistDocument2 pagesCessna 172 Skyhawk Checklistfedor andres81% (31)
- Web p05628 Manual Facility Connect Unificado Rev3Document2 pagesWeb p05628 Manual Facility Connect Unificado Rev3cooldamageNo ratings yet
- Everdrive-64 X7: User ManualDocument12 pagesEverdrive-64 X7: User ManualcooldamageNo ratings yet
- Dishwasher: Owner'S ManualDocument116 pagesDishwasher: Owner'S ManualcooldamageNo ratings yet
- IP Camera User Manual (Common Version)Document59 pagesIP Camera User Manual (Common Version)cooldamageNo ratings yet
- Bose Soundlink Mini Bluetooth-speaker-II Rev.12 SMDocument35 pagesBose Soundlink Mini Bluetooth-speaker-II Rev.12 SMcooldamageNo ratings yet
- High Sensitivity Wireless Receiver Module RXB6Document2 pagesHigh Sensitivity Wireless Receiver Module RXB6SandorGyorfiNo ratings yet
- SER Uide: Caller ID Handsfree Business TelephoneDocument20 pagesSER Uide: Caller ID Handsfree Business TelephonecooldamageNo ratings yet
- SER Uide: Caller ID Handsfree Business TelephoneDocument20 pagesSER Uide: Caller ID Handsfree Business TelephonecooldamageNo ratings yet
- Directory: Hc-04 Hc-04-D -04-D 套件Document6 pagesDirectory: Hc-04 Hc-04-D -04-D 套件Dumitru VMNo ratings yet
- MFL67783505 - Eng-15.8 PDFDocument30 pagesMFL67783505 - Eng-15.8 PDFcooldamageNo ratings yet
- Airport Simulator ManualDocument9 pagesAirport Simulator ManualcooldamageNo ratings yet
- Dishwasher: Owner'S ManualDocument116 pagesDishwasher: Owner'S ManualcooldamageNo ratings yet
- Module BluetoothDocument15 pagesModule Bluetoothapi-288039470No ratings yet
- Operator's Manual: Quick Start GuideDocument20 pagesOperator's Manual: Quick Start GuidecooldamageNo ratings yet
- Glow Plug DriverDocument2 pagesGlow Plug DrivercooldamageNo ratings yet
- 3789Document72 pages3789B.j. DixonNo ratings yet
- Boxford Know Your LatheDocument108 pagesBoxford Know Your LatheRoy Masters75% (4)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- H. P. Lovecraft: Trends in ScholarshipDocument18 pagesH. P. Lovecraft: Trends in ScholarshipfernandoNo ratings yet
- The Tales Themselves - An Overview by Dr. Anna ChallengerDocument15 pagesThe Tales Themselves - An Overview by Dr. Anna Challengerhimkeraditya100% (2)
- TITLE: Paper Format GuidelinesDocument3 pagesTITLE: Paper Format GuidelinesLakshmanan MarimuthuNo ratings yet
- Database Management Systems-6Document10 pagesDatabase Management Systems-6Arun SasidharanNo ratings yet
- NumericalMethods UofVDocument182 pagesNumericalMethods UofVsaladsamurai100% (1)
- I Didn't Notice That My Glass Was Broken Until I Filled ItDocument3 pagesI Didn't Notice That My Glass Was Broken Until I Filled It23 Đàm Phương Nguyên 10D04No ratings yet
- 3 Unit 6 Week 5 Lesson Plan PlaybookDocument18 pages3 Unit 6 Week 5 Lesson Plan PlaybookembryjdNo ratings yet
- Installation Cheat Sheet 1 - OpenCV 3 and C++Document3 pagesInstallation Cheat Sheet 1 - OpenCV 3 and C++David BernalNo ratings yet
- Symfony Quick Tour 3.4Document26 pagesSymfony Quick Tour 3.4Tita Sri PuspitaNo ratings yet
- BB 7Document17 pagesBB 7Bayu Sabda ChristantaNo ratings yet
- Text LinguisticsDocument30 pagesText LinguisticsIAmAngryGuyNo ratings yet
- CS571 Lecture4 Scheduling PDFDocument39 pagesCS571 Lecture4 Scheduling PDFHadcjj ManNo ratings yet
- MAKER List OF MATERIAL & EQUIPMENTS - LONGLINEDocument7 pagesMAKER List OF MATERIAL & EQUIPMENTS - LONGLINETri HariyNo ratings yet
- Test Bank For Fundamentals of Financial Management Concise Edition 10th Edition by BrighamDocument36 pagesTest Bank For Fundamentals of Financial Management Concise Edition 10th Edition by Brighamfulvousdidactyln3o2100% (43)
- Sample XML File (Books - XML)Document4 pagesSample XML File (Books - XML)Saajidah AafreenNo ratings yet
- Consuming NETCONF On NexusDocument3 pagesConsuming NETCONF On Nexusaurumstar2000No ratings yet
- 26 The Participles: 272 The Present (Or Active) ParticipleDocument7 pages26 The Participles: 272 The Present (Or Active) ParticipleCerasela Iuliana PienoiuNo ratings yet
- ?admin Panel Bypass Checklist?Document3 pages?admin Panel Bypass Checklist?setyahangga3No ratings yet
- LISTENING COMPREHENSION TEST TYPESDocument15 pagesLISTENING COMPREHENSION TEST TYPESMuhammad AldinNo ratings yet
- SNMP Simple Network Management ProtocolDocument16 pagesSNMP Simple Network Management ProtocolBenson Edwin RajNo ratings yet
- Mini Python - BeginnerDocument82 pagesMini Python - BeginnerBemnet GirmaNo ratings yet
- Experimental Project On Action ResearchDocument3 pagesExperimental Project On Action Researchddum292No ratings yet
- Predictive - Modelling - Project - PDF 1Document31 pagesPredictive - Modelling - Project - PDF 1Shiva KumarNo ratings yet
- LESSON PLAN - Kinds of WeatherDocument4 pagesLESSON PLAN - Kinds of WeatherSittie Naifa CasanNo ratings yet
- Chemistry - Superscripts, Subscripts and Other Symbols For Use in Google DocsDocument2 pagesChemistry - Superscripts, Subscripts and Other Symbols For Use in Google DocsSandra Aparecida Martins E SilvaNo ratings yet
- Kumulus COAreviewDocument8 pagesKumulus COAreviewTran quoc HuyNo ratings yet
- Introduction To Fractions: What Is A Fraction?Document7 pagesIntroduction To Fractions: What Is A Fraction?Rahul BanerjeeNo ratings yet
- Ferdinand LessonDocument2 pagesFerdinand Lessonapi-534190089No ratings yet
- Unit 3 Introduction To Ms-ExcelDocument12 pagesUnit 3 Introduction To Ms-ExcelKomal NandanNo ratings yet
- Plural and Singular Rules of NounsDocument6 pagesPlural and Singular Rules of NounsDatu rox AbdulNo ratings yet