You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Programming Cat® Electronic Truck EngineDocument258 pagesProgramming Cat® Electronic Truck EngineDuy Kha95% (108)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Volvo Trucks North America Fuel System Design and FunctionDocument12 pagesVolvo Trucks North America Fuel System Design and FunctionEduardo Pai Tocarlo90% (40)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Speeduino Manual: Install, Configure & Use Open-Source Engine ManagementDocument58 pagesSpeeduino Manual: Install, Configure & Use Open-Source Engine Managementgiapy0000No ratings yet
- Pinout Denso Hyundai Megatruck2010Document1 pagePinout Denso Hyundai Megatruck2010giapy0000No ratings yet
- Bosch System Basis Chip Cy329 Product SummaryDocument6 pagesBosch System Basis Chip Cy329 Product SummaryPijai TDMNo ratings yet
- Electric Diagram For SR-250 Upper1Document1 pageElectric Diagram For SR-250 Upper1giapy0000No ratings yet
- Ic 900 PDFDocument100 pagesIc 900 PDFShubra DebNo ratings yet
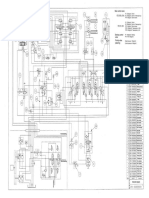
- 25 MR-100 Hyd-DiagDocument1 page25 MR-100 Hyd-Diaggiapy0000No ratings yet
- PLC Overview 4104euen0802Document40 pagesPLC Overview 4104euen0802Jeevan JyotiNo ratings yet
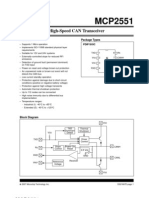
- MCP 2551Document24 pagesMCP 2551senguttuvelNo ratings yet
- VOLVO 7748542 US Installation EMS 2 D13 PDFDocument62 pagesVOLVO 7748542 US Installation EMS 2 D13 PDFSIVARAMANJAGANATHANNo ratings yet
- Manualegcp2 26174 BDocument234 pagesManualegcp2 26174 BINGRgomezNo ratings yet
- L Series: Engineered To SaveDocument8 pagesL Series: Engineered To Savegiapy0000No ratings yet
- User'S Manual: PIC-P26J50 Proto Development BoardDocument19 pagesUser'S Manual: PIC-P26J50 Proto Development Boardgiapy0000100% (1)
- 6068hf 485 Manual-EngineDocument160 pages6068hf 485 Manual-Enginegiapy0000No ratings yet
- Manual de Partes Del Motor Cat c9Document127 pagesManual de Partes Del Motor Cat c9jalb80% (5)
- Pic 14000Document153 pagesPic 14000MarkoStankovicNo ratings yet
- Manual Pic 18F2550Document430 pagesManual Pic 18F2550Pancho NuncioNo ratings yet
- Speeduino Manual PDFDocument58 pagesSpeeduino Manual PDFgiapy0000No ratings yet
- Preamp PDFDocument1 pagePreamp PDFgiapy0000No ratings yet
- m0698 - Power Mode Bypass Controller To Suit Komatsu Hd785-5 and Hd785-7 VehiclesDocument16 pagesm0698 - Power Mode Bypass Controller To Suit Komatsu Hd785-5 and Hd785-7 Vehiclesgiapy0000No ratings yet
- Gold Capacitors: Electric Double Layer CapacitorsDocument28 pagesGold Capacitors: Electric Double Layer Capacitorsgiapy0000No ratings yet
- 275kw Diesel Generator Datasheet J275u (English)Document4 pages275kw Diesel Generator Datasheet J275u (English)giapy0000No ratings yet
- VHP750 XHP750WCAT零件手册Document66 pagesVHP750 XHP750WCAT零件手册giapy000050% (2)
- Product Manual 04176 (Revision G, 8/2015) : Proact™ Ii Electric Powered Actuator and DriverDocument33 pagesProduct Manual 04176 (Revision G, 8/2015) : Proact™ Ii Electric Powered Actuator and DriverpayNo ratings yet
- Koler Power Systems 20 - 2000kW - Operation - Manual PDFDocument80 pagesKoler Power Systems 20 - 2000kW - Operation - Manual PDFTấn Dũng BùiNo ratings yet
- R"i 1 - F'y" Uo: LB II IftDocument2 pagesR"i 1 - F'y" Uo: LB II Iftgiapy0000No ratings yet
- Scania Diagnos 2.32 Release NotesDocument12 pagesScania Diagnos 2.32 Release Notesgiapy0000No ratings yet
- Complex Fluid For Olga 5Document10 pagesComplex Fluid For Olga 5angry_granNo ratings yet
- Load capacity diagrams and features of Linde electric counterbalanced trucksDocument2 pagesLoad capacity diagrams and features of Linde electric counterbalanced trucksashielanieNo ratings yet
- Bharat Hotels Annual ReportDocument203 pagesBharat Hotels Annual ReportJaydeep Thaker100% (1)
- GEA PHE NT enDocument2 pagesGEA PHE NT enVLASTAR100% (2)
- Business Graduation ProjectDocument26 pagesBusiness Graduation ProjectSanket ThoratNo ratings yet
- Glycerol Production, Consumption, Prices, Characterization and New Trends in CombustionDocument19 pagesGlycerol Production, Consumption, Prices, Characterization and New Trends in CombustionmkamalzamanNo ratings yet
- Particulate Photocatalysts CRDocument67 pagesParticulate Photocatalysts CRYiou WangNo ratings yet
- Design and Implementation of IOT Based Monitoring System For Solar TreeDocument26 pagesDesign and Implementation of IOT Based Monitoring System For Solar TreeDhanraj GuptaNo ratings yet
- "View" "Slide Show.": Resources Chapter MenuDocument88 pages"View" "Slide Show.": Resources Chapter Menuelty TanNo ratings yet
- OCR Advanced GCE Physics A - 2826/01 - Unifying Concepts in Physics - January 2007Document12 pagesOCR Advanced GCE Physics A - 2826/01 - Unifying Concepts in Physics - January 2007Soham PatwardhanNo ratings yet
- 21st Refinery Technology Meet - The CompendiumDocument474 pages21st Refinery Technology Meet - The CompendiumAnurag Ingle100% (5)
- Surge arrestor protectionDocument1 pageSurge arrestor protectionJae SudNo ratings yet
- Calculating monthly electricity consumptionDocument2 pagesCalculating monthly electricity consumptionStella KazanciNo ratings yet
- RT Vol6 DraftDocument177 pagesRT Vol6 DraftJeevan R Nair100% (1)
- Response of Water Resources Systems To Climate ChangeDocument355 pagesResponse of Water Resources Systems To Climate ChangePat Prodanovic100% (5)
- Can Your Roof Handle The Weight of Solar Panels?Document2 pagesCan Your Roof Handle The Weight of Solar Panels?Princess Joan UlitNo ratings yet
- Saacke Steam Pressure Atomizer PDFDocument2 pagesSaacke Steam Pressure Atomizer PDFKhaled SaadnehNo ratings yet
- Heat Exchanger (Oil To Water) Installation Information: Description: Power RequirementsDocument4 pagesHeat Exchanger (Oil To Water) Installation Information: Description: Power Requirements413666436qq.comNo ratings yet
- Reiki - More Concerning The SymbolsDocument25 pagesReiki - More Concerning The SymbolsJames Deacon100% (7)
- NewsStand - 24 of October 2021Document16 pagesNewsStand - 24 of October 2021Ahmed MansourNo ratings yet
- Back To Basics - RTO MediaDocument2 pagesBack To Basics - RTO Mediaguardsman3No ratings yet
- ADV P Application Information Fuse DescriptionsDocument1 pageADV P Application Information Fuse DescriptionsdipenkhandhediyaNo ratings yet
- General CatalogueDocument26 pagesGeneral CatalogueKasturi LetchumananNo ratings yet
- DTC P0135 Oxyge (A/F) Sensor Heater Circuit (Bank 1 Sensor 1)Document3 pagesDTC P0135 Oxyge (A/F) Sensor Heater Circuit (Bank 1 Sensor 1)Erln LimaNo ratings yet
- Anna University ME2303 Design of Machine Elements Exam QuestionsDocument3 pagesAnna University ME2303 Design of Machine Elements Exam QuestionssathurvedhaNo ratings yet
- Perkin Elmer Lambda 25-35-45 ManualDocument116 pagesPerkin Elmer Lambda 25-35-45 ManualAnonymous 6kEQXAUeNo ratings yet
- Special Working Rules For Bahadurgarh Station 1. General and Subsidiary Rules:-A)Document12 pagesSpecial Working Rules For Bahadurgarh Station 1. General and Subsidiary Rules:-A)sahil4INDNo ratings yet
- Fire Safety Procedures: Prevention, Equipment & AlarmsDocument11 pagesFire Safety Procedures: Prevention, Equipment & AlarmsCyrus SantosNo ratings yet
- Igcse: Definitions & Concepts of ElectricityDocument4 pagesIgcse: Definitions & Concepts of ElectricityMusdq ChowdhuryNo ratings yet
- Diesel Engine Technical SpecificationsDocument3 pagesDiesel Engine Technical SpecificationsFahad MohammedNo ratings yet