You might also like
- Symmetrical Components of Electrical NetworkDocument44 pagesSymmetrical Components of Electrical Networksbhatta73100% (1)
- Zero Sequence Impedance of Overhead Transmission LinesDocument11 pagesZero Sequence Impedance of Overhead Transmission LinesMohammed JavithNo ratings yet
- AC Series and ParallelDocument18 pagesAC Series and ParallelRajeev RajanNo ratings yet
- Parallel RLC Circuit and RLC Parallel Circuit AnalysisDocument7 pagesParallel RLC Circuit and RLC Parallel Circuit AnalysisProsenjit ChatterjeeNo ratings yet
- A Simple Scheme For Unity Power-FactorDocument11 pagesA Simple Scheme For Unity Power-Factorsujithkumar50No ratings yet
- Understanding Three-Phase AC SystemsDocument64 pagesUnderstanding Three-Phase AC SystemsSandra WendamNo ratings yet
- SW Assingment-04Document29 pagesSW Assingment-04Violet BoulevardNo ratings yet
- Symmetrical Components OverviewDocument6 pagesSymmetrical Components OverviewezzateisNo ratings yet
- Chapter 08 BJT Small Signal AnalysisDocument58 pagesChapter 08 BJT Small Signal Analysiscinematic300650% (4)
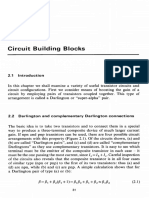
- Circuit Building Blocks GuideDocument16 pagesCircuit Building Blocks Guidelid20No ratings yet
- Exp2 Magnetic AmplifierDocument20 pagesExp2 Magnetic AmplifierNikhil Aggarwal50% (2)
- Chap 1Document84 pagesChap 1lvsaruNo ratings yet
- Machine Simulation ModelsDocument22 pagesMachine Simulation ModelsAshwani RanaNo ratings yet
- The Resource Handbook of Electronics, 8353CH 06Document13 pagesThe Resource Handbook of Electronics, 8353CH 06alfons14No ratings yet
- Dymanic Modelling of Machine SynchromuousDocument23 pagesDymanic Modelling of Machine SynchromuousRaturi DeepankarNo ratings yet
- Faculty of Engineering and Technology Department of Electrical and Computer Engineering Basic Electrical Engineering Lab (ENEE2101)Document20 pagesFaculty of Engineering and Technology Department of Electrical and Computer Engineering Basic Electrical Engineering Lab (ENEE2101)yahya333.pNo ratings yet
- Series and Parallel Ac Networks RLCDocument19 pagesSeries and Parallel Ac Networks RLCSheikh RaselNo ratings yet
- Sequence Components Untransposed LinesDocument14 pagesSequence Components Untransposed LinesEduardo777_7770% (1)
- II B.Tech II Semester, Regular Examinations, April - 2012 Electrical Circuit Analysis - IiDocument8 pagesII B.Tech II Semester, Regular Examinations, April - 2012 Electrical Circuit Analysis - IiViswa ChaitanyaNo ratings yet
- Parallel RLC Circuit and RLC Parallel Circuit AnalysisDocument24 pagesParallel RLC Circuit and RLC Parallel Circuit Analysisengrsana ullahNo ratings yet
- Linear CircuitDocument6 pagesLinear CircuitLilySolaimanNo ratings yet
- Circuit and Network 1Document63 pagesCircuit and Network 1Simion OngoriNo ratings yet
- 3-Lesson Notes Lec 30 Short Medium Line ModelDocument7 pages3-Lesson Notes Lec 30 Short Medium Line ModelAsadAliAwanNo ratings yet
- PSRRDocument8 pagesPSRRAkhil MehtaNo ratings yet
- Base (Reference) PaperDocument7 pagesBase (Reference) Papermphaniteja2012No ratings yet
- Computer-Aided Analysis of Linear Circuits Y-Matrix ApproachDocument17 pagesComputer-Aided Analysis of Linear Circuits Y-Matrix ApproachAnuradha ChathurangaNo ratings yet
- Basic Electronics Model Question Paper 1Document35 pagesBasic Electronics Model Question Paper 1Mr girishNo ratings yet
- Electrical Machines and Power Systems-1Document13 pagesElectrical Machines and Power Systems-1Hamza AteeqNo ratings yet
- A Simplified Forward and Backward Sweep ApproachDocument5 pagesA Simplified Forward and Backward Sweep ApproachImranAhmadQuadriNo ratings yet
- Equivalent Three Terminal NetworkDocument5 pagesEquivalent Three Terminal NetworkBrix BauzonNo ratings yet
- 7LABO Ganago Student Lab8Document37 pages7LABO Ganago Student Lab8Rocio Deidamia Puppi HerreraNo ratings yet
- Fayako Rapor 8Document10 pagesFayako Rapor 8Eren YükselNo ratings yet
- Review key concepts of 3-phase circuitsDocument12 pagesReview key concepts of 3-phase circuitsrocaoNo ratings yet
- A Transformer Protective Relaying AlgorithmDocument6 pagesA Transformer Protective Relaying Algorithmmohmo2007No ratings yet
- Ic 5555Document54 pagesIc 5555Ross RodriguezNo ratings yet
- ELEC4100 Complete NotesDocument150 pagesELEC4100 Complete NotesShittyUsername2013No ratings yet
- S1. Full Wave Bridge Rectifier - Principle of OperationDocument7 pagesS1. Full Wave Bridge Rectifier - Principle of OperationVicNo ratings yet
- SchelkunoffDocument8 pagesSchelkunoffjbnh_No ratings yet
- Regulation of AlternatorDocument6 pagesRegulation of Alternatorkudupudinagesh100% (1)
- Balanced 3-Phase Circuits and Magnetic Circuits ExamDocument8 pagesBalanced 3-Phase Circuits and Magnetic Circuits ExamMir Noushad HussainNo ratings yet
- Solution of Current in R-L-C Series Circuits: LessonDocument13 pagesSolution of Current in R-L-C Series Circuits: LessonPrafull BNo ratings yet
- 1 Circuits Worksheet 1Document8 pages1 Circuits Worksheet 1Mark Syion A. DayaNo ratings yet
- Circle Diagrams: Learning ObjectivesDocument10 pagesCircle Diagrams: Learning ObjectiveskunalNo ratings yet
- Circuit Theory Practice ProblemsDocument0 pagesCircuit Theory Practice Problemsaishuvc1822No ratings yet
- Ac Circuit Simulation: i (t) =I sin (ωt) =I si n (2 π f t)Document4 pagesAc Circuit Simulation: i (t) =I sin (ωt) =I si n (2 π f t)M.USMAN BIN AHMEDNo ratings yet
- Electronics Assignment - Elevate Classes 11095472 2022 09-20-07 47Document134 pagesElectronics Assignment - Elevate Classes 11095472 2022 09-20-07 47dixitratan68No ratings yet
- GATE-2014 Electrical MeasurementsDocument42 pagesGATE-2014 Electrical MeasurementsRamaDinakaran100% (1)
- Questions On LCR CircuitDocument2 pagesQuestions On LCR CircuitKRISHNA PARIHARNo ratings yet
- Module 7 - Ac Parallel Circuits Conyaining InductanceDocument9 pagesModule 7 - Ac Parallel Circuits Conyaining InductanceMARY JOY MAGAWAYNo ratings yet
- GATE 2009 Paper Q1-20Document16 pagesGATE 2009 Paper Q1-20mass1984No ratings yet
- Modul 6 Arus Bolak Balik (AC)Document3 pagesModul 6 Arus Bolak Balik (AC)Sheila HuangNo ratings yet
- 6 Log Anti Log AmplifiersDocument32 pages6 Log Anti Log AmplifiersAnonymous eWMnRr70q0% (1)
- Solving RCL CircuitDocument10 pagesSolving RCL CircuitEarl Patrick EugenioNo ratings yet
- Introduction To AC CircuitsDocument5 pagesIntroduction To AC CircuitsKeerthi Keerthana100% (1)
- DA AnalysisDocument5 pagesDA AnalysisraineymjNo ratings yet
- BS 7671 Voltage DropDocument4 pagesBS 7671 Voltage DropMohammed AbdulmuqeetNo ratings yet
- 3.0 Transformers: 3.1 The Ideal TransformerDocument16 pages3.0 Transformers: 3.1 The Ideal Transformerhafiz_jaaffarNo ratings yet
- Review of 3 PHASEDocument14 pagesReview of 3 PHASEChris Osea AlvarezNo ratings yet
- Current Proportional Potential Difference Voltage ResistanceDocument32 pagesCurrent Proportional Potential Difference Voltage ResistanceSivaraj ChandrasekaranNo ratings yet
- Electrical and Electronic Principles 3 Checkbook: The Checkbook SeriesFrom EverandElectrical and Electronic Principles 3 Checkbook: The Checkbook SeriesNo ratings yet
- Reducing Fault Stress With Zone-Selective Interlocking: Data BulletinDocument28 pagesReducing Fault Stress With Zone-Selective Interlocking: Data BulletinJason SonidoNo ratings yet
- Power - Factor 2023Document17 pagesPower - Factor 2023Jason SonidoNo ratings yet
- Himel International Catalogue 2023Document454 pagesHimel International Catalogue 2023Jason SonidoNo ratings yet
- Flash Hazard Category PDFDocument1 pageFlash Hazard Category PDFJason SonidoNo ratings yet
- Selecting Arrester MCOV-UcDocument9 pagesSelecting Arrester MCOV-Ucjose GonzalezNo ratings yet
- Symmetra™ PX: Earthing PrinciplesDocument20 pagesSymmetra™ PX: Earthing PrinciplesJason SonidoNo ratings yet
- Earthing System - Schneider ElectricDocument8 pagesEarthing System - Schneider ElectricAnne Kelley100% (1)
- Auto Transformer ModuleDocument10 pagesAuto Transformer ModuleIkhwanJackNo ratings yet
- Safety Manual: Updated: July 2013Document26 pagesSafety Manual: Updated: July 2013Jason SonidoNo ratings yet
- ALLEN-BRADLEY'S POWER SYSTEM HARMONICS (A Reference Guide To Causes, Effects and Corrective Measures)Document14 pagesALLEN-BRADLEY'S POWER SYSTEM HARMONICS (A Reference Guide To Causes, Effects and Corrective Measures)Alda EnglandNo ratings yet
- Contactor by EE Controls PDFDocument10 pagesContactor by EE Controls PDFPaul MendozaNo ratings yet
- Electrical Safety Book PDFDocument36 pagesElectrical Safety Book PDFhoaithuat100% (1)
- DATACENTERS Electrical DesignDocument46 pagesDATACENTERS Electrical Designhunterhead2100% (3)
- ANSI MV TechTopics55 EN PDFDocument2 pagesANSI MV TechTopics55 EN PDFJason SonidoNo ratings yet
- Effects of Imbalances and Non Linear Loads in Electricity Distribution System PDFDocument104 pagesEffects of Imbalances and Non Linear Loads in Electricity Distribution System PDFwalet1No ratings yet
- Contactor by EE Controls PDFDocument10 pagesContactor by EE Controls PDFPaul MendozaNo ratings yet
- PLC or DCS PDFDocument12 pagesPLC or DCS PDFsafvanshaikhNo ratings yet
- Electric Motors: Jason Sonido - ReeDocument19 pagesElectric Motors: Jason Sonido - ReeJason SonidoNo ratings yet
- ALLEN-BRADLEY'S POWER SYSTEM HARMONICS (A Reference Guide To Causes, Effects and Corrective Measures)Document14 pagesALLEN-BRADLEY'S POWER SYSTEM HARMONICS (A Reference Guide To Causes, Effects and Corrective Measures)Alda EnglandNo ratings yet
- Effects of Imbalances and Non Linear Loads in Electricity Distribution System PDFDocument104 pagesEffects of Imbalances and Non Linear Loads in Electricity Distribution System PDFwalet1No ratings yet
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Safety Manual: Updated: July 2013Document26 pagesSafety Manual: Updated: July 2013Jason SonidoNo ratings yet
- Flash Hazard Category PDFDocument1 pageFlash Hazard Category PDFJason SonidoNo ratings yet
- Electrical Safety Book PDFDocument36 pagesElectrical Safety Book PDFhoaithuat100% (1)
- DATACENTERS Electrical DesignDocument46 pagesDATACENTERS Electrical Designhunterhead2100% (3)
- Basic Specification of Work Piece Detect SensorDocument3 pagesBasic Specification of Work Piece Detect SensorJason SonidoNo ratings yet
- How To Become A PeeDocument38 pagesHow To Become A PeeKC MoralesNo ratings yet
- Vector AnalysisDocument77 pagesVector Analysisalenair888100% (1)
- A Guide To ControlDocument18 pagesA Guide To ControlJason SonidoNo ratings yet
- Circuit Analysis Capacitance Inductance ProblemsDocument102 pagesCircuit Analysis Capacitance Inductance ProblemsSoji Adimula50% (2)
- A Complete Guide To Design and Build A Hi-Fi LM3886 Amplifier - Circuit BasicsDocument104 pagesA Complete Guide To Design and Build A Hi-Fi LM3886 Amplifier - Circuit BasicsPetr PetrovNo ratings yet
- 1.NLS - Engineering - Guide - Power - Plant - Control PDFDocument31 pages1.NLS - Engineering - Guide - Power - Plant - Control PDFaladanh2000100% (1)
- Ubc 1995-983329Document136 pagesUbc 1995-983329Wagdy KhaterNo ratings yet
- Design A High Power Factor Flyback Converter Using The FL7733 For An LED Driver With Ultra-Wide Output VoltageDocument13 pagesDesign A High Power Factor Flyback Converter Using The FL7733 For An LED Driver With Ultra-Wide Output VoltageadirsomNo ratings yet
- Circuit Modeling For EMCDocument307 pagesCircuit Modeling For EMCshawnr7376100% (1)
- Electrical Machines-I TransformerDocument21 pagesElectrical Machines-I TransformerRajendra Prasad SanapalaNo ratings yet
- Mathematical Model of DC Motor For Analysis of Commutation ProcessesDocument4 pagesMathematical Model of DC Motor For Analysis of Commutation ProcessesMadarwi SarwaNo ratings yet
- Am Loop Antennas 2004Document355 pagesAm Loop Antennas 2004Mario OlivieriNo ratings yet
- Reconfigurable Diffractive Antenna Based On Switchable Electrically Induced TransparencyDocument12 pagesReconfigurable Diffractive Antenna Based On Switchable Electrically Induced TransparencyAnuj SharmaNo ratings yet
- Electric SignalsDocument29 pagesElectric Signalsyttan1116No ratings yet
- Measurement Error AnalysisDocument26 pagesMeasurement Error AnalysisNikhila NicksNo ratings yet
- Forward Converter ReportDocument24 pagesForward Converter ReportWai ChiNo ratings yet
- Vector Control Assigment 4 PDFDocument10 pagesVector Control Assigment 4 PDFMìkz MíshrãNo ratings yet
- Electromagnetic Induction and Alternating Current by AlienDocument13 pagesElectromagnetic Induction and Alternating Current by AlienSanatan KumarNo ratings yet
- Proceedings-Vol 09 No 07-July-Aug-Sept-1971 (George Van Tassel)Document16 pagesProceedings-Vol 09 No 07-July-Aug-Sept-1971 (George Van Tassel)Homers Simpson100% (3)
- Apsym 1094Document5 pagesApsym 1094Aami KeNo ratings yet
- AT3600Document424 pagesAT3600Ahmed Ing ChagrenNo ratings yet
- JNTUA Electrical Circuit Analysis Lab Manual R20Document59 pagesJNTUA Electrical Circuit Analysis Lab Manual R20SELVANo ratings yet
- Chapter 2 - Eddy Current PrinciplesDocument57 pagesChapter 2 - Eddy Current Principlesvibinkumars@gmail.com100% (1)
- On Measurement of Non-Electrical QuantitiesDocument39 pagesOn Measurement of Non-Electrical Quantitiesrao asadNo ratings yet
- Sensors and Transducers GuideDocument56 pagesSensors and Transducers Guidemanjunath100% (1)
- Colicraft Power Transformer DesignDocument4 pagesColicraft Power Transformer DesignPablo KuziwNo ratings yet
- Basic TransformerDocument13 pagesBasic Transformeraswardi8756No ratings yet
- Superconductor Electronics, Professor Dr. Ing. Johann H. Hinken-IsBN-978!3!642-74744-1Document167 pagesSuperconductor Electronics, Professor Dr. Ing. Johann H. Hinken-IsBN-978!3!642-74744-1the bungalowvideotapesNo ratings yet
- Sree Vidyanikethan Engineering College: Unit-IDocument2 pagesSree Vidyanikethan Engineering College: Unit-INmg KumarNo ratings yet
- Magnetic Bearing AnalysisDocument72 pagesMagnetic Bearing AnalysisSaujatya MandalNo ratings yet
- Wireless Charging Power Control For HESS Through Receiver Side Voltage ControlDocument6 pagesWireless Charging Power Control For HESS Through Receiver Side Voltage ControlAlice LiewNo ratings yet
- Graphene-Based Flexible Antennas for Consumer ElectronicsDocument8 pagesGraphene-Based Flexible Antennas for Consumer ElectronicszahraNo ratings yet