You might also like
- Differential Transformation Method for Mechanical Engineering ProblemsFrom EverandDifferential Transformation Method for Mechanical Engineering ProblemsNo ratings yet
- Selvam College of Technology, Namakkal - 03 PH: 9942099122: 2 Marks Question & Answers Unit - I Basics of MechanismsDocument30 pagesSelvam College of Technology, Namakkal - 03 PH: 9942099122: 2 Marks Question & Answers Unit - I Basics of MechanismsVijayan GopalsamyNo ratings yet
- KOM ProjectDocument15 pagesKOM ProjectArvene Binmer JesaryNo ratings yet
- Kinematics of Machinery Unit 1Document100 pagesKinematics of Machinery Unit 1Harinath GowdNo ratings yet
- Rr411405 Advanced Kinematics and DynamicsDocument11 pagesRr411405 Advanced Kinematics and DynamicsSRINIVASA RAO GANTANo ratings yet
- Midterm MECE303 M 2 11 SampleDocument2 pagesMidterm MECE303 M 2 11 SamplePplegal PplegalpplegalNo ratings yet
- Kinematics and Dynamics of Machinery Lab ManualDocument63 pagesKinematics and Dynamics of Machinery Lab ManualsaranNo ratings yet
- Position Analysis of Mechanisms Using Algebraic MethodsDocument47 pagesPosition Analysis of Mechanisms Using Algebraic MethodszhingalahoolaNo ratings yet
- Report On Four Bar Mechanism of Sewing MachineDocument8 pagesReport On Four Bar Mechanism of Sewing MachineshazedislamNo ratings yet
- Transmission Angles and Four-Bar LinkagesDocument30 pagesTransmission Angles and Four-Bar LinkagesBivas Panigrahi0% (1)
- Vibration 5 11Document20 pagesVibration 5 11Aalekh PrajapatiNo ratings yet
- A (Bold Faced) : by HandDocument79 pagesA (Bold Faced) : by Handএ. এইচ ফিরোজNo ratings yet
- Dynamic Analysis of Six Bar Mechanical PressDocument9 pagesDynamic Analysis of Six Bar Mechanical PressRts VeselinocNo ratings yet
- KOM Unit 1Document100 pagesKOM Unit 1dpksobs100% (1)
- Kinematics of a slider-crank mechanism experimentDocument22 pagesKinematics of a slider-crank mechanism experimentSmart100% (1)
- Slider Crank Dynamics Lab ExperimentsDocument8 pagesSlider Crank Dynamics Lab ExperimentsMuhammad ALI NoorNo ratings yet
- Chosen Problems and Their Final Solutions of Chap. 1 (Waldron)Document7 pagesChosen Problems and Their Final Solutions of Chap. 1 (Waldron)Fuu HouHouNo ratings yet
- Kom Unit 2Document24 pagesKom Unit 2Muthuvel M100% (3)
- Mechanics of Machines ME2031: Lab Instructor: Awais LiaqatDocument12 pagesMechanics of Machines ME2031: Lab Instructor: Awais LiaqatAnonymous B0cm7LZhNo ratings yet
- Slider CrankDocument3 pagesSlider CrankAnonymous GGtvR65MR100% (1)
- Four Bar LinkageDocument13 pagesFour Bar LinkageMBHladilekNo ratings yet
- 9A14402 Theory of MachinesDocument8 pages9A14402 Theory of MachinessivabharathamurthyNo ratings yet
- Static/dynamic Contact FEA and Experimental Study For Tooth Profile Modification of Helical GearsDocument9 pagesStatic/dynamic Contact FEA and Experimental Study For Tooth Profile Modification of Helical Gearsanmol6237No ratings yet
- Applied Mecanics Lab ManualDocument52 pagesApplied Mecanics Lab ManualHasnain BukhariNo ratings yet
- ME 143: Mechanics of Machinery-1: Dr. Aly Mousaad AlyDocument24 pagesME 143: Mechanics of Machinery-1: Dr. Aly Mousaad AlyAjmal MohammedNo ratings yet
- Dynamics Lab Manual - ME6511Document66 pagesDynamics Lab Manual - ME6511vinothNo ratings yet
- KOM Question BankDocument10 pagesKOM Question Banknsubbu_mitNo ratings yet
- Theory of Machines Flywheel)Document22 pagesTheory of Machines Flywheel)Rajesh VenkateshNo ratings yet
- IJIRAE::Design and DMU Kinematic Analysis of Slider Crank Mechanism Using CATIA and MATLABDocument6 pagesIJIRAE::Design and DMU Kinematic Analysis of Slider Crank Mechanism Using CATIA and MATLABIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- DOM Full Notes PDFDocument263 pagesDOM Full Notes PDFCHAMAN R100% (1)
- MME206: Kinematics and Dynamics: Mechanism and Machine Theorys, Prentice Hall, 2013Document2 pagesMME206: Kinematics and Dynamics: Mechanism and Machine Theorys, Prentice Hall, 2013raghav dhamani100% (1)
- Assignment ClutchDocument624 pagesAssignment ClutchSubhash KNo ratings yet
- Crank and Slotted Lever Quick Return (Rev2)Document9 pagesCrank and Slotted Lever Quick Return (Rev2)Vipin YadavNo ratings yet
- Upto 2010 KomDocument36 pagesUpto 2010 KomRajueswarNo ratings yet
- ch02 2Document7 pagesch02 2Siow Shung Churn75% (4)
- 4 Bar Mechanism PDFDocument3 pages4 Bar Mechanism PDFSagar Dutt MathurNo ratings yet
- 27-11 Mechanical Vibration (ME)Document3 pages27-11 Mechanical Vibration (ME)Mahir MahmoodNo ratings yet
- Scotch YokeDocument7 pagesScotch YokeSandeela NaveedNo ratings yet
- Unit 2 and 3 Mechanics of MachinesDocument21 pagesUnit 2 and 3 Mechanics of MachinesYogaraja JeyarajNo ratings yet
- Engineering in SocietyDocument44 pagesEngineering in SocietyBella AlmillateguiNo ratings yet
- Mechanics of Machines - VibrationDocument34 pagesMechanics of Machines - VibrationGiovani Carpin100% (1)
- Belt & Rope DrivesDocument26 pagesBelt & Rope Drivesarpit089100% (1)
- Tom-I Question Bank UpdatedDocument174 pagesTom-I Question Bank Updatedkiran_wakchaureNo ratings yet
- Rotational MechanicsDocument17 pagesRotational MechanicsAnant KumarNo ratings yet
- Lagrange Equation 1Document32 pagesLagrange Equation 1Gthulasi78No ratings yet
- Kinematics of MechanicsDocument34 pagesKinematics of MechanicsErasmo Israel Garcia Ochoa100% (1)
- Gear Trains - Lecture 10Document22 pagesGear Trains - Lecture 10priyankar007No ratings yet
- Force Analysis - PPSXDocument107 pagesForce Analysis - PPSXÖmer Faruk EkizNo ratings yet
- Computer-Aided Kinematics and Dynamics of MechanicDocument14 pagesComputer-Aided Kinematics and Dynamics of MechanicvishnavjNo ratings yet
- DH Parameters PDFDocument122 pagesDH Parameters PDFyash523No ratings yet
- ME-321 Kinematics & Dynamics Course OutlineDocument3 pagesME-321 Kinematics & Dynamics Course OutlineNshuti Rene FabriceNo ratings yet
- Balancing of Reciprocating MassesDocument43 pagesBalancing of Reciprocating MassesNAVEENNo ratings yet
- Triple PendulumDocument9 pagesTriple PendulumSalvador SilveyraNo ratings yet
- Classical 093Document33 pagesClassical 093Julian David Henao EscobarNo ratings yet
- Design Optimization of Fluid Machinery: Applying Computational Fluid Dynamics and Numerical OptimizationFrom EverandDesign Optimization of Fluid Machinery: Applying Computational Fluid Dynamics and Numerical OptimizationNo ratings yet
- Advanced Computational and Design Techniques in Applied Electromagnetic Systems: Proceedings of the International ISEM Symposium on Advanced Computational and Design Techniques in Applied Electromagnetic Systems, Seoul, Korea, 22-24 June, 1994From EverandAdvanced Computational and Design Techniques in Applied Electromagnetic Systems: Proceedings of the International ISEM Symposium on Advanced Computational and Design Techniques in Applied Electromagnetic Systems, Seoul, Korea, 22-24 June, 1994No ratings yet
- Spacecraft Attitude Control: A Linear Matrix Inequality ApproachFrom EverandSpacecraft Attitude Control: A Linear Matrix Inequality ApproachNo ratings yet
- Mechanisms: Kinematic Analysis and Applications in RoboticsFrom EverandMechanisms: Kinematic Analysis and Applications in RoboticsNo ratings yet
- Fluid Mechanics SyllabusDocument2 pagesFluid Mechanics Syllabusshailendra_236No ratings yet
- R K Bansal - Dimensional AnalysisDocument52 pagesR K Bansal - Dimensional Analysisshailendra_236No ratings yet
- Jen PDFDocument16 pagesJen PDFMalvika DiddeeNo ratings yet
- Z.aa V4 I1 Teaching Simulation To Future EngineersDocument2 pagesZ.aa V4 I1 Teaching Simulation To Future EngineersSaumya SinhaNo ratings yet
- Model and SimilutDocument15 pagesModel and Similutmir shifayatNo ratings yet
- Ie NotesDocument13 pagesIe Notesshailendra_236No ratings yet
- Institute Vision MissionDocument3 pagesInstitute Vision Missionshailendra_236No ratings yet
- This Equation Holds at Low Velocities, Laminar Flow Which Are Free From TurbulenceDocument4 pagesThis Equation Holds at Low Velocities, Laminar Flow Which Are Free From Turbulenceshailendra_236No ratings yet
- Fluid MechanicsDocument6 pagesFluid Mechanicsshailendra_236No ratings yet
- Gate BooksDocument1 pageGate Booksshailendra_236No ratings yet
- Syllabus UPPSCDocument3 pagesSyllabus UPPSCshailendra_236No ratings yet
- Experiment:1 Introduction and Different Features of The CAD SoftwareDocument13 pagesExperiment:1 Introduction and Different Features of The CAD Softwareshailendra_236No ratings yet
- B. Tech. (Sem. V) I MTT, October 2014 Subject Code: 5ME2Document2 pagesB. Tech. (Sem. V) I MTT, October 2014 Subject Code: 5ME2shailendra_236No ratings yet
- Application Format For Chartered Engineer CertificateDocument1 pageApplication Format For Chartered Engineer CertificateAthish KumarNo ratings yet
- Computational Fluid DynamicsDocument8 pagesComputational Fluid Dynamicsshailendra_236No ratings yet
- Ultrasonic MachiningDocument20 pagesUltrasonic MachiningKoushik Rao100% (1)
- Important DatesDocument1 pageImportant Datesshailendra_236No ratings yet
- NIET Workshop Creo ANSYS FEM CADDocument2 pagesNIET Workshop Creo ANSYS FEM CADshailendra_236No ratings yet
- InstructionsDocument1 pageInstructionsshailendra_236No ratings yet
- Seat MatrixDocument13 pagesSeat Matrixshailendra_236No ratings yet
- Btech Mech Scheme12 13Document3 pagesBtech Mech Scheme12 13api-280187508No ratings yet
- New Text DocumentDocument1 pageNew Text Documentshailendra_236No ratings yet
- IES 2013 Paper 1Document18 pagesIES 2013 Paper 1rchandra2473No ratings yet
- Install Creo3 Unistudent StandardDocument1 pageInstall Creo3 Unistudent Standardshailendra_236No ratings yet
- Spot Cooling by Energy Separation in Ranque - Hilsch Tube and Applications in Modern Mass Production TechnologyDocument3 pagesSpot Cooling by Energy Separation in Ranque - Hilsch Tube and Applications in Modern Mass Production Technologyshailendra_236No ratings yet
- Panas Dengan Metode Persamaan BedaDocument27 pagesPanas Dengan Metode Persamaan BedaAmah SusyantiNo ratings yet
- RTU Syllabus Robotics& FEMDocument2 pagesRTU Syllabus Robotics& FEMshailendra_236No ratings yet
- Ncrame Automation in Heavy Fabrication in Mass ProductionDocument5 pagesNcrame Automation in Heavy Fabrication in Mass Productionshailendra_236No ratings yet
- Night Vision Technology Seminar Report PDF 130805071844 Phpapp01Document31 pagesNight Vision Technology Seminar Report PDF 130805071844 Phpapp01pinkysushuNo ratings yet
- Case IH Reman Engines Application GuideDocument20 pagesCase IH Reman Engines Application Guidegeraldo gil100% (1)
- C565001 E04Document714 pagesC565001 E04MIGUEL POSSO100% (2)
- XT0425 Special ToolsDocument14 pagesXT0425 Special ToolsG SNo ratings yet
- LISTADO DE PARTES PCP WeatherfordDocument8 pagesLISTADO DE PARTES PCP Weatherfordcarlos eduardo gutierrez gomez100% (1)
- Remo TBDocument5 pagesRemo TBTyler MacNo ratings yet
- Din 19704-1-2014-11Document52 pagesDin 19704-1-2014-11nicola100% (3)
- Crankshaft Position SensorDocument9 pagesCrankshaft Position SensorJam BabNo ratings yet
- Service Parts List: 4.5" (115mm) ANGLE GRINDERDocument3 pagesService Parts List: 4.5" (115mm) ANGLE GRINDERAlvaro Fernando Reyes CastañedaNo ratings yet
- 328750852089918-Working HydraulicsDocument9 pages328750852089918-Working HydraulicsBestway Equipment RepairingNo ratings yet
- Flanges ANSI SS 304LDocument47 pagesFlanges ANSI SS 304LestantodosusadosNo ratings yet
- G900B Manual de PartesDocument1,164 pagesG900B Manual de PartesOmar MorenoNo ratings yet
- Engine Oil Cooler - Install - Engine Oil Cooler With A High Mounted Filter Base (KENR6081-15)Document4 pagesEngine Oil Cooler - Install - Engine Oil Cooler With A High Mounted Filter Base (KENR6081-15)Anderson Oliveira SilvaNo ratings yet
- Sistema de Control de Frenos Nissan Armada 2010Document117 pagesSistema de Control de Frenos Nissan Armada 2010Hendrick CepedaNo ratings yet
- Shin Trimmers PDFDocument118 pagesShin Trimmers PDFvfan100% (1)
- Rekap Tahunan Penggunaan Sparepart 2022Document8 pagesRekap Tahunan Penggunaan Sparepart 2022Yosephine vAn BieberzNo ratings yet
- PEMBRIL AFC FLUID COUPLINGS FOR MINING APPLICATIONSDocument2 pagesPEMBRIL AFC FLUID COUPLINGS FOR MINING APPLICATIONSProdip SarkarNo ratings yet
- 335Document557 pages335Денис БорисовNo ratings yet
- 25XMH'16Document41 pages25XMH'16Rafael Dutra MarquesNo ratings yet
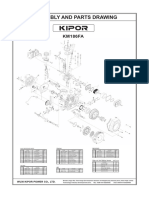
- Assembly and Parts Drawing: KM186FADocument2 pagesAssembly and Parts Drawing: KM186FAKevin Madera EscalanteNo ratings yet
- HCR Filter KitDocument26 pagesHCR Filter KitBùi Xuân Đức100% (1)
- Gep110 4-RJ60150BDocument366 pagesGep110 4-RJ60150BAlexandr Ivanov SarmientoNo ratings yet
- Timing Chain Service Cam Chain Removal Installation Acura RDX 2.3LDocument12 pagesTiming Chain Service Cam Chain Removal Installation Acura RDX 2.3LCarlos Gunter Tamayo MoralesNo ratings yet
- Spare Parts Catalogue - EngineDocument526 pagesSpare Parts Catalogue - EngineXIANGZHINo ratings yet
- 07 - Sistema EletricoDocument86 pages07 - Sistema EletricoFabio MacielNo ratings yet
- MFS 40 - 50Document85 pagesMFS 40 - 50Gabriel PetersonNo ratings yet
- VW Jetta 2005 Transmission Identification GuideDocument170 pagesVW Jetta 2005 Transmission Identification Guideniculescuc100% (3)
- PAI Mack & Volvo Applications 2018: Catalog Data Sheet MP7 / MP8 SeriesDocument3 pagesPAI Mack & Volvo Applications 2018: Catalog Data Sheet MP7 / MP8 SeriesAlexis SanchezNo ratings yet
- Bostitch M27 ManualDocument44 pagesBostitch M27 ManualArturo de la VegaNo ratings yet
- HD 13 - 14 H2.01 - PartsDocument178 pagesHD 13 - 14 H2.01 - PartsLucas Rodrigues GuimarãesNo ratings yet