You might also like
- Construct Integral Controller CircuitDocument2 pagesConstruct Integral Controller CircuitMitzOsorioNo ratings yet
- Analogue ComputersDocument13 pagesAnalogue ComputersbbratovzNo ratings yet
- C2 - Error Channel Investigation and Simple Position Control SystemDocument9 pagesC2 - Error Channel Investigation and Simple Position Control SystemizamaiyusNo ratings yet
- 2142 2 Frequency Response: Semester 5Document9 pages2142 2 Frequency Response: Semester 5Dwayne JohnsonNo ratings yet
- Exp 11 Single Phase Inverter Part IDocument7 pagesExp 11 Single Phase Inverter Part Iusmpowerlab0% (1)
- PID Control Buck Converter by Using Arduino UNODocument52 pagesPID Control Buck Converter by Using Arduino UNOveerakumar BITNo ratings yet
- Determine induction motor parameters (R1, R2, X1, X2, Rc, XMDocument4 pagesDetermine induction motor parameters (R1, R2, X1, X2, Rc, XMAshik AhmedNo ratings yet
- Exp 12 Single Phase Inverter Part IIDocument7 pagesExp 12 Single Phase Inverter Part IIusmpowerlabNo ratings yet
- (P1) Modul DC Motor Speed Control SystemDocument13 pages(P1) Modul DC Motor Speed Control SystemTito Bambang Priambodo - 6726No ratings yet
- EE 340L Experiment 6 Synchronous Generator Operation GridDocument6 pagesEE 340L Experiment 6 Synchronous Generator Operation GridMuhammad Saad AbdullahNo ratings yet
- Op Amp Adder and IntregatorDocument5 pagesOp Amp Adder and IntregatorAshish100% (1)
- lab13Document9 pageslab13Lûtwàmä JôëNo ratings yet
- Lab 05 (Servo)Document4 pagesLab 05 (Servo)hitesh89No ratings yet
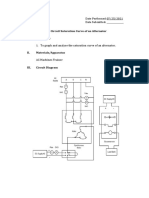
- Open Circuit Saturation Curve of An Alternator I. ObjectivesDocument4 pagesOpen Circuit Saturation Curve of An Alternator I. ObjectivesArnel Pamaos Lopiba MontañezNo ratings yet
- IC Applications Lab ManualDocument42 pagesIC Applications Lab ManualRavikumar ImadabathuniNo ratings yet
- Unit2 MSDocument43 pagesUnit2 MSchandramohan murugan100% (1)
- Lab ManualDocument56 pagesLab ManualNishant AgrawalNo ratings yet
- Op-amp Lab: Integrator, Differentiator, and Follower CircuitsDocument9 pagesOp-amp Lab: Integrator, Differentiator, and Follower Circuitsmohamed almansiNo ratings yet
- مختبر سيطرهDocument66 pagesمختبر سيطرهKaesar SabahNo ratings yet
- Pre-Lab Due Before Performing The Experiment: Induction Motor DC GenerationDocument11 pagesPre-Lab Due Before Performing The Experiment: Induction Motor DC GenerationtrebeardNo ratings yet
- ECE 5570 - Lab 8: Brushless DC Motor Control With 6-Step CommutationDocument6 pagesECE 5570 - Lab 8: Brushless DC Motor Control With 6-Step CommutationAnimesh GhoshNo ratings yet
- Control 3-Phase AC Drive with DSPDocument5 pagesControl 3-Phase AC Drive with DSPaman srivastavaNo ratings yet
- Lab. Exercise PL1 CC/CC Converters: Electrònica de Potència Grau en Enginyeria Electrònica Industrial I AutomàticaDocument8 pagesLab. Exercise PL1 CC/CC Converters: Electrònica de Potència Grau en Enginyeria Electrònica Industrial I AutomàticageovannyNo ratings yet
- Basic Control Systems LabDocument10 pagesBasic Control Systems LabNut PamornNo ratings yet
- DC MOTOR TESTDocument83 pagesDC MOTOR TESTvatsalshah24No ratings yet
- Astable MultivibratorDocument3 pagesAstable MultivibratorTushar GuptaNo ratings yet
- 0 Lab6 Astable MultivibratorDocument3 pages0 Lab6 Astable Multivibratorchandu3072002No ratings yet
- Frequency ResponseDocument10 pagesFrequency ResponseClementNo ratings yet
- EECS 3480 Lab Manual ExperimentsDocument54 pagesEECS 3480 Lab Manual Experimentsmohammed100% (1)
- Frequency Response Lab Manual Mar 2022Document10 pagesFrequency Response Lab Manual Mar 2022Thant Zaw AungNo ratings yet
- Synchronous Machine TestsDocument10 pagesSynchronous Machine TestsItalo ChiarellaNo ratings yet
- Lab - Single Phase Induction MotorDocument8 pagesLab - Single Phase Induction MotorMarvin RosquitesNo ratings yet
- Simulation of 3 Phase Inverter and AC-DC ConverterDocument11 pagesSimulation of 3 Phase Inverter and AC-DC ConverterSoumiya SrinivasanNo ratings yet
- Final Circuit ProjectDocument5 pagesFinal Circuit ProjectKmo 7No ratings yet
- Ica Lab (135) Iii-IDocument87 pagesIca Lab (135) Iii-IesesesNo ratings yet
- Benn Machine Lab ManualDocument14 pagesBenn Machine Lab ManualRahatullah Khan100% (1)
- Electronic WorkshopDocument7 pagesElectronic WorkshopSenthil KumarNo ratings yet
- EEET103 Lab 07Document5 pagesEEET103 Lab 07محمد الحديNo ratings yet
- EE215 Lab 4Document6 pagesEE215 Lab 4vhiep195No ratings yet
- Mech 371 Manual v2010Document38 pagesMech 371 Manual v2010Joe E.No ratings yet
- Block 1 - Week 1Document5 pagesBlock 1 - Week 1JosiasNo ratings yet
- Process - Control SimulatorDocument7 pagesProcess - Control SimulatorSakshi RajputNo ratings yet
- Reading Material - ServomechanismsDocument25 pagesReading Material - ServomechanismsDimitri RamloganNo ratings yet
- EE215: Fundamentals of Electrical Engineering Lab 4 Time Delay CircuitsDocument6 pagesEE215: Fundamentals of Electrical Engineering Lab 4 Time Delay CircuitsÁo ĐenNo ratings yet
- Synchronous Motor Test TestDocument5 pagesSynchronous Motor Test TestChidamparam PalaniyappanNo ratings yet
- Application 3: Proportional Mode Temperature Control: Parts and Equipment RequiredDocument12 pagesApplication 3: Proportional Mode Temperature Control: Parts and Equipment Requiredcleytonmarques1991No ratings yet
- T 3Document16 pagesT 3Marwa MohamedNo ratings yet
- Project Report Control (DC Motor Module DCM150f) KP KDDocument5 pagesProject Report Control (DC Motor Module DCM150f) KP KD黒い からすNo ratings yet
- Prosedur Percobaan Motor SinkronSinkron Generator SinkronDocument10 pagesProsedur Percobaan Motor SinkronSinkron Generator SinkronDara AmeliaNo ratings yet
- Closed Loop Control System (CSL - 04) : Technical Manual FORDocument19 pagesClosed Loop Control System (CSL - 04) : Technical Manual FORAAYUSH KUMARNo ratings yet
- Sensor Lab Report: Op-AmpDocument6 pagesSensor Lab Report: Op-AmpAyamGolek05No ratings yet
- Load Characteristics of Separately and Self-Excited Generators LabDocument17 pagesLoad Characteristics of Separately and Self-Excited Generators LabPinky EceNo ratings yet
- Lab 04Document10 pagesLab 04Muhammad Owais RazaNo ratings yet
- Lab 3 Squirrel Cage Induction Machine-1Document8 pagesLab 3 Squirrel Cage Induction Machine-1max100% (1)
- Lab 10Document8 pagesLab 10A. AlghamdiNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsFrom EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsNo ratings yet
- 5 Traffic ForecastsDocument3 pages5 Traffic ForecastsMitzOsorioNo ratings yet
- 6 Telecommunications TrafficDocument21 pages6 Telecommunications TrafficMitzOsorioNo ratings yet
- Group Report ListDocument1 pageGroup Report ListMitzOsorioNo ratings yet
- Equipments and StudyDocument3 pagesEquipments and StudyMitzOsorioNo ratings yet
- MCQs Wireless and Wire Communications SystemsDocument115 pagesMCQs Wireless and Wire Communications SystemsMitzOsorioNo ratings yet
- Question Day TwoDocument3 pagesQuestion Day TwoMitzOsorioNo ratings yet
- NotesDocument5 pagesNotesMitzOsorioNo ratings yet
- Transmission Fundamentals 2Document124 pagesTransmission Fundamentals 2MitzOsorioNo ratings yet
- Equipments and StudyDocument3 pagesEquipments and StudyMitzOsorioNo ratings yet
- Thermo Problems 2Document24 pagesThermo Problems 2MitzOsorio100% (1)
- D.C. MachinesDocument20 pagesD.C. MachinesNelson Naval CabingasNo ratings yet
- StandardsDocument2 pagesStandardsMitzOsorioNo ratings yet
- Problem InstDocument2 pagesProblem InstMitzOsorioNo ratings yet
- Tables 3Document1 pageTables 3robomangoNo ratings yet
- Physics ProblemsDocument5 pagesPhysics ProblemsMitzOsorioNo ratings yet
- Examples ProblemsDocument6 pagesExamples ProblemsMitzOsorioNo ratings yet
- ThermDocument6 pagesThermMitzOsorioNo ratings yet
- Vector Analysis OtherDocument31 pagesVector Analysis OtherMitzOsorioNo ratings yet
- Unit7-NAN 2Document38 pagesUnit7-NAN 2Anser PashaNo ratings yet
- Excel Review Center ECE Review THE - Geometry Solution: o o o oDocument3 pagesExcel Review Center ECE Review THE - Geometry Solution: o o o oMitzOsorioNo ratings yet
- Ethernet Passive Optical Networks Mcgraw Hill Professional PDFDocument2 pagesEthernet Passive Optical Networks Mcgraw Hill Professional PDFAngelNo ratings yet
- MULTICLIN PREMIUM AND ADVANCE SHOWER TOILETSDocument4 pagesMULTICLIN PREMIUM AND ADVANCE SHOWER TOILETSAnonymous fDmkXcIqNo ratings yet
- Basic Knowledge of Discrete Semiconductor Device - Toshiba Electronic Devices & Storage Corporation - Asia-EnglishDocument10 pagesBasic Knowledge of Discrete Semiconductor Device - Toshiba Electronic Devices & Storage Corporation - Asia-EnglishReetipragya SinghNo ratings yet
- 7j Quick Quiz PDFDocument3 pages7j Quick Quiz PDF10 D Maanya GeraNo ratings yet
- Basics of Electricity: Siemens STEP 2000 CourseDocument44 pagesBasics of Electricity: Siemens STEP 2000 CourseEveraldo SantanaNo ratings yet
- Manual Del GPT100Document4 pagesManual Del GPT100Johannita Chavez GalanNo ratings yet
- The Indoor Radio Propagation ChannelDocument26 pagesThe Indoor Radio Propagation Channelnguyen6688No ratings yet
- Industrial Sliding Gate GearmotorsDocument11 pagesIndustrial Sliding Gate GearmotorsVictor Catril MatamalaNo ratings yet
- Vacon NX Lift Application Manual UD00758L ENDocument69 pagesVacon NX Lift Application Manual UD00758L ENDean LefebvreNo ratings yet
- LG 50PQ30 Plasma TV SpecificationsDocument2 pagesLG 50PQ30 Plasma TV Specificationsdrsajithnv100% (2)
- 2M Tek Torq Tek ZIIDocument1 page2M Tek Torq Tek ZIIamghardjillali_449230% (1)
- Lenovo Ideapad 330S Hardware Maintenance ManualDocument84 pagesLenovo Ideapad 330S Hardware Maintenance Manualsakis_the_fraudNo ratings yet
- Single Carrier FDMA For Next Generation Communication Systems: An OverviewDocument6 pagesSingle Carrier FDMA For Next Generation Communication Systems: An OverviewPal NiladriNo ratings yet
- How To Manufacture A Free Energy Device (Perpetual Motion)Document12 pagesHow To Manufacture A Free Energy Device (Perpetual Motion)leechster100% (1)
- 3BSE035982-600 - en AC 800M 6.0 Communication ProtocolsDocument226 pages3BSE035982-600 - en AC 800M 6.0 Communication ProtocolsHenry Hernan Salinas CastañedaNo ratings yet
- Compact NSX - 630A - LV429741Document3 pagesCompact NSX - 630A - LV429741معين عزامNo ratings yet
- Testing Protection Relays with Typhoon HIL and ScadaDocument4 pagesTesting Protection Relays with Typhoon HIL and ScadaKrutika GiteNo ratings yet
- SR 2000TL InverterDocument2 pagesSR 2000TL Inverterjrg_1411No ratings yet
- Yaskawa V1000 CIMR VC ManualDocument418 pagesYaskawa V1000 CIMR VC Manualdanghe2006No ratings yet
- Egpu GuideDocument5 pagesEgpu GuideGerman Castorman Cortez AguileraNo ratings yet
- Sony 5.1ch Home Cinema With Wireless Rear Speakers HT-S40R - AysonlineDocument2 pagesSony 5.1ch Home Cinema With Wireless Rear Speakers HT-S40R - AysonlineAhmad RazaNo ratings yet
- SZ-16V DatasheetDocument3 pagesSZ-16V DatasheetCezar Adrian SimereaNo ratings yet
- Simatic Net s7-1200 - Profibus CM 1243-5 enDocument48 pagesSimatic Net s7-1200 - Profibus CM 1243-5 enalexiel1806No ratings yet
- A E Wilcox - Car of The WeekDocument1 pageA E Wilcox - Car of The WeekDigital MediaNo ratings yet
- The HP-Compaq MergerDocument22 pagesThe HP-Compaq MergerAshish Agarwal100% (1)
- Thyristor Firing Circuit: Rs = 10-22 Ω Rg = 1 kΩ Cg = 0.01 μF - 0.1μFDocument10 pagesThyristor Firing Circuit: Rs = 10-22 Ω Rg = 1 kΩ Cg = 0.01 μF - 0.1μFAnil Kumar SinghNo ratings yet
- Xyce Reference GuideDocument634 pagesXyce Reference GuideVojislav MedićNo ratings yet
- FBB Cause NoDocument17 pagesFBB Cause NoZafar Yab100% (1)
- S200 Flame Detectors PDFDocument6 pagesS200 Flame Detectors PDFHarjonoNo ratings yet
- db2 System MonitorDocument629 pagesdb2 System Monitorprakash_6849No ratings yet