You might also like
- Scan & Pay Jio BillDocument22 pagesScan & Pay Jio BillsumeetNo ratings yet
- Electrical Machines and DrivesDocument123 pagesElectrical Machines and Drivesanon-427532100% (14)
- Power Electronics Converters and their Control for Renewable Energy ApplicationsFrom EverandPower Electronics Converters and their Control for Renewable Energy ApplicationsArezki FekikNo ratings yet
- Astm A105, A105mDocument5 pagesAstm A105, A105mMike Dukas0% (1)
- Admission:Discharge Criteria in Speech-Language Pathology - ASHADocument16 pagesAdmission:Discharge Criteria in Speech-Language Pathology - ASHANádia MarquesNo ratings yet
- Electrical Overstress (EOS): Devices, Circuits and SystemsFrom EverandElectrical Overstress (EOS): Devices, Circuits and SystemsNo ratings yet
- Comparison of Field Oriented Control and Direct Torque Control For Permanent Magnet Synchronous Motor PMSMDocument6 pagesComparison of Field Oriented Control and Direct Torque Control For Permanent Magnet Synchronous Motor PMSMjp_20_20No ratings yet
- Silicon ManufacturingDocument132 pagesSilicon ManufacturingAndrea SottocornolaNo ratings yet
- Tailwind OperationsDocument3 pagesTailwind Operationsiceman737No ratings yet
- Power Electronics and Drives U4Document58 pagesPower Electronics and Drives U4Idiots Idiotss100% (1)
- Economic Dispatch ControlDocument31 pagesEconomic Dispatch ControlTirumalesh ReddyNo ratings yet
- Unit 5 - Assessment of One'S Teaching Practice: Universidad de ManilaDocument15 pagesUnit 5 - Assessment of One'S Teaching Practice: Universidad de ManilaDoc Joey100% (3)
- Improved Indirect Power Control (IDPC) of Wind Energy Conversion Systems (WECS)From EverandImproved Indirect Power Control (IDPC) of Wind Energy Conversion Systems (WECS)No ratings yet
- History of Computer AnimationDocument39 pagesHistory of Computer AnimationRanzelle UrsalNo ratings yet
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionFrom EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionNo ratings yet
- Solar Cell Materials: Developing TechnologiesFrom EverandSolar Cell Materials: Developing TechnologiesGavin J. ConibeerNo ratings yet
- 3.1-Pile Design Calculation For Boundary (p1 To p50)Document24 pages3.1-Pile Design Calculation For Boundary (p1 To p50)layaljamal2No ratings yet
- Torque ControlDocument304 pagesTorque ControlJong Won Choi100% (1)
- Best Mesl StudoDocument15 pagesBest Mesl StudoJoenielNo ratings yet
- Comparison of FOC and DTCDocument6 pagesComparison of FOC and DTCchienbkaNo ratings yet
- FOC and DTCDocument69 pagesFOC and DTCRaed MohsenNo ratings yet
- Advance AC DrivesDocument9 pagesAdvance AC DrivesAmit NaikNo ratings yet
- Sipaper enDocument16 pagesSipaper endracuojiNo ratings yet
- Wound-Field Synchronous Machine DrivesDocument62 pagesWound-Field Synchronous Machine DrivesKorlpate BhaskarNo ratings yet
- PMSM Control Strategy ComparisonDocument4 pagesPMSM Control Strategy Comparisonpersian67No ratings yet
- Today: Inverter + PMSM Control: 3 Phase Inverter (DC To AC) 3 Phase Electric MachineDocument29 pagesToday: Inverter + PMSM Control: 3 Phase Inverter (DC To AC) 3 Phase Electric Machineciprian167No ratings yet
- Best Books Power Electronics Reference GuideDocument1 pageBest Books Power Electronics Reference GuideShakir AhmadNo ratings yet
- ETAPDocument1 pageETAPMohamed SobhyNo ratings yet
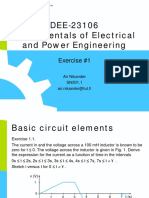
- DEE-23106 Fundamentals of Electrical and Power Engineering: Exercise #1Document12 pagesDEE-23106 Fundamentals of Electrical and Power Engineering: Exercise #1shoptodipNo ratings yet
- Practical Design and Optimization of Buck ConvertersDocument97 pagesPractical Design and Optimization of Buck ConvertersAdolfo Valdez Bahena100% (1)
- Modeling and Analysis of 6 Phase Synchronous MotorDocument14 pagesModeling and Analysis of 6 Phase Synchronous MotorArif IqbalNo ratings yet
- Power Flow Analysis Using Gauss-Seidel MethodDocument41 pagesPower Flow Analysis Using Gauss-Seidel MethodSasikala SivakumarNo ratings yet
- Modelling of The Three-Phase Induction Motor Using SIMULINKDocument3 pagesModelling of The Three-Phase Induction Motor Using SIMULINKsajs20175% (4)
- New Approach For Modelling Doubly-Fed Induction Generator (DFIG) For Grid-Connection StudiesDocument13 pagesNew Approach For Modelling Doubly-Fed Induction Generator (DFIG) For Grid-Connection StudiesKhalid HarounNo ratings yet
- Modelling of Grid-Connected Geared 2MW PMSG Wind Turbine GeneratorDocument88 pagesModelling of Grid-Connected Geared 2MW PMSG Wind Turbine GeneratorDao Van ManhNo ratings yet
- Evaluation of The Transient Response of A DC MotorDocument6 pagesEvaluation of The Transient Response of A DC MotorNesuh MalangNo ratings yet
- 3 Phase-Controlled DC Motor DrivesDocument45 pages3 Phase-Controlled DC Motor DrivesgilmartNo ratings yet
- BLDC and PMS Motor ComparisonDocument26 pagesBLDC and PMS Motor ComparisonAnimesh MukherjeeNo ratings yet
- Electric Machines BasicsDocument8 pagesElectric Machines BasicsPrasad SogaladNo ratings yet
- RSCAD Software OverviewDocument2 pagesRSCAD Software Overviewkra_amNo ratings yet
- Solid State Drives Short BookDocument48 pagesSolid State Drives Short BookGomathi Raja MNo ratings yet
- 2 Modeling of DC MachinesDocument23 pages2 Modeling of DC MachinessubhasishpodderNo ratings yet
- Lipo PDFDocument11 pagesLipo PDFjalilemadiNo ratings yet
- Rotor Flux Based MRASDocument6 pagesRotor Flux Based MRASMastan ReddyNo ratings yet
- DC-DC Switching Boost ConverterDocument16 pagesDC-DC Switching Boost ConverterRaden Mas AgoenkNo ratings yet
- Line Flow Limit IEEE 30Document3 pagesLine Flow Limit IEEE 30sithangkathanNo ratings yet
- EEE8155 Design and Analysis of Electrical Machines and DrivesDocument13 pagesEEE8155 Design and Analysis of Electrical Machines and DrivesstephenNo ratings yet
- G2 Consulting - Motor Design and Power Electronics Course OverviewDocument188 pagesG2 Consulting - Motor Design and Power Electronics Course OverviewFehan Arif MalikNo ratings yet
- PMSM Control (FOC & DTC) for WECS & DrivesDocument57 pagesPMSM Control (FOC & DTC) for WECS & Drivesleonardo_arévalo_28No ratings yet
- BOOK - A Bartoszewicz - Robust Control Theory and Applications PDFDocument692 pagesBOOK - A Bartoszewicz - Robust Control Theory and Applications PDFhplchagasNo ratings yet
- Power Systems Lab PDFDocument54 pagesPower Systems Lab PDFBhanu BkvNo ratings yet
- Speed Control of Switched Reluctance Motor-LibreDocument9 pagesSpeed Control of Switched Reluctance Motor-LibreIndrajithSrNo ratings yet
- Lesson Plan em 2Document3 pagesLesson Plan em 2anbuelectricalNo ratings yet
- Synchronous Machine ModelDocument22 pagesSynchronous Machine ModelMultazam ZemNo ratings yet
- SPEED Electric Machines BrochureDocument8 pagesSPEED Electric Machines Brochure张之政No ratings yet
- Induction Motor ModelDocument31 pagesInduction Motor ModelMohammedHaythamNo ratings yet
- Understanding The Right-Half-Plane ZeroDocument3 pagesUnderstanding The Right-Half-Plane ZerokurabyqldNo ratings yet
- Levi, E. - Multiphase Electric Machines For Variable-Speed ApplicationsDocument17 pagesLevi, E. - Multiphase Electric Machines For Variable-Speed ApplicationsSherif M. Dabour100% (2)
- Single-Phase Transformer Inverter with PI ControllerDocument12 pagesSingle-Phase Transformer Inverter with PI ControllerNimish SharmaNo ratings yet
- OP5600 Simulator User ManualDocument52 pagesOP5600 Simulator User Manualantonellagrande100% (1)
- 2019 Full Exam SolutionDocument8 pages2019 Full Exam SolutionAhmed AliNo ratings yet
- Modeling and Simulation of Dfig To Grid Connected Wind Power Generation Using MatlabDocument12 pagesModeling and Simulation of Dfig To Grid Connected Wind Power Generation Using MatlabIAEME PublicationNo ratings yet
- DC-DC Converter Guide for BeginnersDocument98 pagesDC-DC Converter Guide for BeginnersHarsha Anantwar100% (1)
- of SRMDocument22 pagesof SRMGopoji Dayanand71% (7)
- Top-Down Digital VLSI Design: From Architectures to Gate-Level Circuits and FPGAsFrom EverandTop-Down Digital VLSI Design: From Architectures to Gate-Level Circuits and FPGAsNo ratings yet
- Differential Transformation Method for Mechanical Engineering ProblemsFrom EverandDifferential Transformation Method for Mechanical Engineering ProblemsNo ratings yet
- Archive of SID: Performance Analysis of A Cost Effective 4-Switch 3-Phase Inverter Fed IM DriveDocument6 pagesArchive of SID: Performance Analysis of A Cost Effective 4-Switch 3-Phase Inverter Fed IM DrivePranav VyasNo ratings yet
- Wave Energy Utilization - A Review of The TechnologyDocument20 pagesWave Energy Utilization - A Review of The TechnologyMelissa SilvaNo ratings yet
- A High Efficiency Piezoelectric Energy Harvesting SystemsDocument4 pagesA High Efficiency Piezoelectric Energy Harvesting SystemsJuseverck JuniorNo ratings yet
- (Architecture Ebook) Energia Solar TermicaDocument161 pages(Architecture Ebook) Energia Solar TermicaVeronica Adriana100% (1)
- Hybrid Electrical Generation Stand-Alone Systems Application in Offshore Satellite Oil Platforms in MexicoDocument3 pagesHybrid Electrical Generation Stand-Alone Systems Application in Offshore Satellite Oil Platforms in MexicoJuseverck JuniorNo ratings yet
- A Study of Piezoelectric Harvesters For Low-Level Vibrations in Wireless Sensor NetworksDocument6 pagesA Study of Piezoelectric Harvesters For Low-Level Vibrations in Wireless Sensor NetworksJuseverck JuniorNo ratings yet
- 4588 10467 1 PBDocument6 pages4588 10467 1 PBJuseverck JuniorNo ratings yet
- 08 07 2013 08 37 20Document6 pages08 07 2013 08 37 20Juseverck JuniorNo ratings yet
- Latest Generation Subsea Observatory StandardsDocument5 pagesLatest Generation Subsea Observatory StandardsJuseverck JuniorNo ratings yet
- How To Develop A Hydro SchemeDocument28 pagesHow To Develop A Hydro SchemeAdolf Leopold SihombingNo ratings yet
- General Maximum Power Transfer Theorem: Abstraet-ThisDocument3 pagesGeneral Maximum Power Transfer Theorem: Abstraet-ThisJuseverck JuniorNo ratings yet
- Handbook For Developing Micro Hydro in British Columbia: March 23, 2004Document69 pagesHandbook For Developing Micro Hydro in British Columbia: March 23, 2004Armand Doru DomutaNo ratings yet
- Micro Hydro Power 1Document9 pagesMicro Hydro Power 1Juseverck JuniorNo ratings yet
- Events of National Importance 2016Document345 pagesEvents of National Importance 2016TapasKumarDashNo ratings yet
- Advanced Scan I21no2Document29 pagesAdvanced Scan I21no2Jaiber SosaNo ratings yet
- A Sample of Directory or Instruction:: World Temperatures February 16Document1 pageA Sample of Directory or Instruction:: World Temperatures February 16eksaNo ratings yet
- Pop-Up SystemDocument4 pagesPop-Up Systemkothat82No ratings yet
- Stylistic and DiscourseDocument4 pagesStylistic and Discourseeunhye carisNo ratings yet
- Influence of Oxygen in Copper - 2010Document1 pageInfluence of Oxygen in Copper - 2010brunoNo ratings yet
- CEILING BOARDING GUIDEDocument5 pagesCEILING BOARDING GUIDEahahNo ratings yet
- Mayan Calendar End Date Sparks Doomsday SpeculationDocument16 pagesMayan Calendar End Date Sparks Doomsday SpeculationElfen RoxanneNo ratings yet
- Demand Performa For Annual DemandDocument10 pagesDemand Performa For Annual DemandpushpNo ratings yet
- Senior Design Projects 201-2020 - For Website - MEDocument5 pagesSenior Design Projects 201-2020 - For Website - MEYujbvhujgNo ratings yet
- Calibration Method For Misaligned Catadioptric CameraDocument8 pagesCalibration Method For Misaligned Catadioptric CameraHapsari DeviNo ratings yet
- Sci9 Q4 Mod8.2Document24 pagesSci9 Q4 Mod8.2John Christian RamosNo ratings yet
- Campbell Soup Case-StudyDocument3 pagesCampbell Soup Case-StudyraghudeepaNo ratings yet
- DLP Din8Document2 pagesDLP Din8KOUDJIL MohamedNo ratings yet
- Feasibility of Traditional Milk DeliveryDocument21 pagesFeasibility of Traditional Milk DeliverySumit TomarNo ratings yet
- Writing A Spooky Setting DescriptionDocument4 pagesWriting A Spooky Setting DescriptionAayan AnjumNo ratings yet
- 199-Article Text-434-1-10-20200626Document11 pages199-Article Text-434-1-10-20200626ryan renaldiNo ratings yet
- Conductivity NickelDocument2 pagesConductivity Nickelkishormujumdar998No ratings yet
- Technology and Livelihood Education: Agri - Fishery Arts (Agricultural Crops Production) Marketing Agricultural ProductsDocument14 pagesTechnology and Livelihood Education: Agri - Fishery Arts (Agricultural Crops Production) Marketing Agricultural Productslana del rey100% (1)
- Adopt 2017 APCPI procurement monitoringDocument43 pagesAdopt 2017 APCPI procurement monitoringCA CANo ratings yet
- G String v5 User ManualDocument53 pagesG String v5 User ManualFarid MawardiNo ratings yet