You might also like
- Super Mohawk DatasheetDocument2 pagesSuper Mohawk DatasheetPolicarpo Chan DamasNo ratings yet
- Subsea Bend Restrictor Bend Limiting DeviceDocument2 pagesSubsea Bend Restrictor Bend Limiting DeviceAshish GuptaNo ratings yet
- ANS145 - Beef Cattle ProductionDocument52 pagesANS145 - Beef Cattle ProductionEgie BulawinNo ratings yet
- Slot RecoveryDocument49 pagesSlot RecoveryIslam MazeedNo ratings yet
- Wet Tree Vs Dry TreeDocument12 pagesWet Tree Vs Dry TreeAndirama PutraNo ratings yet
- Oliveros, Kyle Gio M. Bspe 5B PTQ Riser SystemsDocument14 pagesOliveros, Kyle Gio M. Bspe 5B PTQ Riser Systemsglenn vincent floresNo ratings yet
- Slide Subsea CranfieldDocument18 pagesSlide Subsea CranfieldFoo BrandonNo ratings yet
- Subsea Innovation Sealing SolutionsDocument7 pagesSubsea Innovation Sealing SolutionsanishsrNo ratings yet
- IWOCSDocument4 pagesIWOCSrcaletaNo ratings yet
- Ageing and Life Extension of Offshore Structures: The Challenge of Managing Structural IntegrityFrom EverandAgeing and Life Extension of Offshore Structures: The Challenge of Managing Structural IntegrityNo ratings yet
- DP Capability & Power Requirement M. Vuorre, Student Uis November 2010Document14 pagesDP Capability & Power Requirement M. Vuorre, Student Uis November 2010pavanipkNo ratings yet
- Assignment #3 Subsea Manifold and TemplatesDocument6 pagesAssignment #3 Subsea Manifold and TemplatesGerald SantosNo ratings yet
- Subsea MPFMDocument15 pagesSubsea MPFMTg TarroNo ratings yet
- L CR 002r1 PDFDocument19 pagesL CR 002r1 PDFDhakshina KNo ratings yet
- Design, Engineering and Construction of SCRDocument14 pagesDesign, Engineering and Construction of SCRJuan LopezNo ratings yet
- Scanrope - UmbilicalDocument6 pagesScanrope - Umbilicalcuongpham301No ratings yet
- Oss Subsea Connectors BR PDFDocument12 pagesOss Subsea Connectors BR PDFDheeraj Chowdary DhanekulaNo ratings yet
- Subsea Well Access RWISDocument2 pagesSubsea Well Access RWISWilliam EvansNo ratings yet
- 2019-03-29 Tor Ole OlsenDocument118 pages2019-03-29 Tor Ole Olsenfle92No ratings yet
- Subsea Final)Document25 pagesSubsea Final)국무성100% (1)
- Monobore Sub SeaDocument9 pagesMonobore Sub Seacamilo777No ratings yet
- Intervention Workover Control Systems Brochure DigitalDocument8 pagesIntervention Workover Control Systems Brochure DigitalmaxNo ratings yet
- SubSea Controls InspectorDocument2 pagesSubSea Controls Inspectorxiexienin23No ratings yet
- Standardizing Completion and Workover Riser AssessmentsDocument26 pagesStandardizing Completion and Workover Riser Assessmentsvictor gerardoNo ratings yet
- Pipe in Pipe Swaged Welding New Design by Subsea 7Document19 pagesPipe in Pipe Swaged Welding New Design by Subsea 7Sridharan ChandranNo ratings yet
- PTS 60 2405 Offshore Marine Safety PDFDocument75 pagesPTS 60 2405 Offshore Marine Safety PDFIrfan YogaNo ratings yet
- Subsea Valves BRDocument14 pagesSubsea Valves BRFrancesco AntoniniNo ratings yet
- Lesson 2 Subsea Production SystemsDocument42 pagesLesson 2 Subsea Production SystemsSashang BalaNo ratings yet
- Stochastic ProcessesDocument264 pagesStochastic Processesmanosmill100% (1)
- Integrity of Subsea Control UmbilicalDocument11 pagesIntegrity of Subsea Control Umbilicalxinlin.cppNo ratings yet
- 212Document58 pages212aliNo ratings yet
- Thesis On Retail Management of The Brand 'Sleepwell'Document62 pagesThesis On Retail Management of The Brand 'Sleepwell'Sajid Lodha100% (1)
- PROSERV Subsea Ctrls Project RefDocument81 pagesPROSERV Subsea Ctrls Project RefJerome LIKIBINo ratings yet
- DeepLay-eks-2022-183 - Distributed Buoyancy Module For Lazy WaveDocument13 pagesDeepLay-eks-2022-183 - Distributed Buoyancy Module For Lazy WaveGunawan SuwarnoNo ratings yet
- Deep Sea MooringDocument20 pagesDeep Sea MooringsujitNo ratings yet
- Power Umbilicals and Cables Used To Provide Power and Various ControlDocument21 pagesPower Umbilicals and Cables Used To Provide Power and Various ControlGaurav DixitNo ratings yet
- 5020-SPE ATW-Dry Tree Vs Wet Tree Considerations For Deepwater Field DevelopmentDocument23 pages5020-SPE ATW-Dry Tree Vs Wet Tree Considerations For Deepwater Field DevelopmentHoang Truong MinhNo ratings yet
- 1503off SubseaposterDIG PDFDocument1 page1503off SubseaposterDIG PDFHWANG INBUMNo ratings yet
- Deepwater Sedimentary Systems: Science, Discovery, and ApplicationsFrom EverandDeepwater Sedimentary Systems: Science, Discovery, and ApplicationsJon R. RotzienNo ratings yet
- L01 - Introduction To SPS PDFDocument39 pagesL01 - Introduction To SPS PDFariful islamNo ratings yet
- Kongsberg Subsea Storage UnitDocument18 pagesKongsberg Subsea Storage UnitZhiyong ShanNo ratings yet
- Cap08&09 Ensaios OffshoreDocument50 pagesCap08&09 Ensaios OffshoreThalles Giangiarulo de AguiarNo ratings yet
- 5 HPHT Ray StawaiszDocument8 pages5 HPHT Ray Stawaiszgacm98No ratings yet
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsFrom EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo ratings yet
- New Touch Down Zone (TDZ) Solutions For Steel CatenaryDocument52 pagesNew Touch Down Zone (TDZ) Solutions For Steel CatenaryKrixvicNo ratings yet
- LWSCR DesignDocument19 pagesLWSCR DesignokpokparoroNo ratings yet
- 2011 - Production Enhancement by Using Electrical Submersible PumpDocument66 pages2011 - Production Enhancement by Using Electrical Submersible PumpParesh Pawar100% (1)
- Stimcommander: Automated Stimulation Delivery PlatformDocument2 pagesStimcommander: Automated Stimulation Delivery PlatformAgung PratamaNo ratings yet
- RisersDocument3 pagesRisersSubsea_Team100% (1)
- 20160126Document47 pages20160126SATRIONo ratings yet
- Assignment & Practicals OverviewDocument5 pagesAssignment & Practicals OverviewConstAntinosNo ratings yet
- Baker Hughes Caisson ESP (2010)Document2 pagesBaker Hughes Caisson ESP (2010)hermit44535No ratings yet
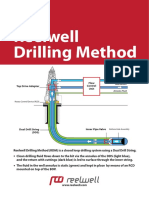
- Reelwell Drilling Method: Flow Control Unit Top Drive AdapterDocument2 pagesReelwell Drilling Method: Flow Control Unit Top Drive AdapterFikri AlhabsyiNo ratings yet
- Cross Sea Detection Based On Synthetic Aperture Radar (Sar) Data and Numerical Wave Model (Wam)Document6 pagesCross Sea Detection Based On Synthetic Aperture Radar (Sar) Data and Numerical Wave Model (Wam)Gautam SudhirNo ratings yet
- VetcoGray S-Series SVXTDocument2 pagesVetcoGray S-Series SVXTarchitectintxNo ratings yet
- Exam Solution 2009-10gDocument9 pagesExam Solution 2009-10gConstAntinosNo ratings yet
- OE June 17 EditionDocument92 pagesOE June 17 EditionPerumal KesavanNo ratings yet
- Turret MooringsDocument3 pagesTurret Mooringsjo0% (1)
- 03 02 Jereh ENDocument43 pages03 02 Jereh ENQingming MaNo ratings yet
- OTC 24461 Advances in Autonomous Deepwater InspectionDocument9 pagesOTC 24461 Advances in Autonomous Deepwater InspectionThomas ThomasNo ratings yet
- Flat PackDocument1 pageFlat PackJansen SaippaNo ratings yet
- HW 1 SolutionDocument5 pagesHW 1 SolutionNisargPatelNo ratings yet
- CFD For Offshore ApplicationsDocument34 pagesCFD For Offshore ApplicationsDaniel GómezNo ratings yet
- Hydraulics and PneumaticsDocument6 pagesHydraulics and PneumaticsRyo TevezNo ratings yet
- ATS2017 ProspectusDocument13 pagesATS2017 ProspectusGiri WakshanNo ratings yet
- Transposable Elements - Annotated - 2020Document39 pagesTransposable Elements - Annotated - 2020Monisha vNo ratings yet
- Carpentry Grade 8 Week 1 2Document20 pagesCarpentry Grade 8 Week 1 2SANTIAGO ALVISNo ratings yet
- DOST-PHIVOLCS Presentation For The CRDRRMC Meeting 15jan2020Document36 pagesDOST-PHIVOLCS Presentation For The CRDRRMC Meeting 15jan2020RJay JacabanNo ratings yet
- AppcDocument71 pagesAppcTomy lee youngNo ratings yet
- Zigbee Technology:19-3-2010: Seminor Title DateDocument21 pagesZigbee Technology:19-3-2010: Seminor Title Dateitdep_gpcet7225No ratings yet
- Module 2Document7 pagesModule 2karthik karti100% (1)
- Electromagnetism WorksheetDocument3 pagesElectromagnetism WorksheetGuan Jie KhooNo ratings yet
- MPT EnglishDocument5 pagesMPT Englishkhadijaamir435No ratings yet
- Research Methods in Developmental PsychologyDocument9 pagesResearch Methods in Developmental PsychologyHugoNo ratings yet
- Advantages Renewable Energy Resources Environmental Sciences EssayDocument3 pagesAdvantages Renewable Energy Resources Environmental Sciences EssayCemerlang StudiNo ratings yet
- MiddleWare Technology - Lab Manual JWFILESDocument171 pagesMiddleWare Technology - Lab Manual JWFILESSangeetha BajanthriNo ratings yet
- English 2nd Quarter Week 7 Connotation DenotationDocument28 pagesEnglish 2nd Quarter Week 7 Connotation DenotationEdward Estrella GuceNo ratings yet
- ICU General Admission Orders: OthersDocument2 pagesICU General Admission Orders: OthersHANIMNo ratings yet
- Sanskrit Lessons: �丘��恆� � by Bhikshuni Heng HsienDocument4 pagesSanskrit Lessons: �丘��恆� � by Bhikshuni Heng HsiendysphunctionalNo ratings yet
- Pontevedra 1 Ok Action PlanDocument5 pagesPontevedra 1 Ok Action PlanGemma Carnecer Mongcal50% (2)
- Donnan Membrane EquilibriaDocument37 pagesDonnan Membrane EquilibriamukeshNo ratings yet
- EmployWise JAVA ASSIGNMENTDocument2 pagesEmployWise JAVA ASSIGNMENTPreet PatelNo ratings yet
- New Microsoft Office Word DocumentDocument5 pagesNew Microsoft Office Word DocumentSukanya SinghNo ratings yet
- The Beauty of Laplace's Equation, Mathematical Key To Everything - WIRED PDFDocument9 pagesThe Beauty of Laplace's Equation, Mathematical Key To Everything - WIRED PDFYan XiongNo ratings yet
- Vishal: Advanced Semiconductor Lab King Abdullah University of Science and Technology (KAUST) Thuwal, Saudi Arabia 23955Document6 pagesVishal: Advanced Semiconductor Lab King Abdullah University of Science and Technology (KAUST) Thuwal, Saudi Arabia 23955jose taboadaNo ratings yet
- Mahatma Gandhi University: Priyadarshini Hills, Kottayam-686560Document136 pagesMahatma Gandhi University: Priyadarshini Hills, Kottayam-686560Rashmee DwivediNo ratings yet
- Heirs of Vinluan Estate in Pangasinan Charged With Tax Evasion For Unsettled Inheritance Tax CaseDocument2 pagesHeirs of Vinluan Estate in Pangasinan Charged With Tax Evasion For Unsettled Inheritance Tax CaseAlvin Dela CruzNo ratings yet
- BA 4722 Marketing Strategy SyllabusDocument6 pagesBA 4722 Marketing Strategy SyllabusSri GunawanNo ratings yet
- How To Be A Better StudentDocument2 pagesHow To Be A Better Studentct fatima100% (1)
- June 2014 (v3) QP - Paper 3 CIE Physics IGCSEDocument20 pagesJune 2014 (v3) QP - Paper 3 CIE Physics IGCSECole KhantNo ratings yet