You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Delphi 7-Interbase TutorialDocument78 pagesDelphi 7-Interbase Tutorialdee26suckNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- 47 QM-013 Master Inspection CharacteristicsDocument7 pages47 QM-013 Master Inspection CharacteristicsElanNo ratings yet
- Data Stage FaqsDocument47 pagesData Stage FaqsVamsi Krishna EmanyNo ratings yet
- Understanding How to Interpret Visual TextsDocument23 pagesUnderstanding How to Interpret Visual TextsSeleena MaidinNo ratings yet
- VaptDocument25 pagesVaptNaveen ThakurNo ratings yet
- The Adventures of Tom SawyerDocument8 pagesThe Adventures of Tom SawyerJUAN CARLOS BAEZNo ratings yet
- 'Aesthetics Beyond Aesthetics' by Wolfgang WelschDocument17 pages'Aesthetics Beyond Aesthetics' by Wolfgang WelschFangLin HouNo ratings yet
- Thomas Aquinas - Contemporary Philosophical Perspectives (PDFDrive)Document415 pagesThomas Aquinas - Contemporary Philosophical Perspectives (PDFDrive)MartaNo ratings yet
- LM 7805 RegulatorDocument12 pagesLM 7805 RegulatorFadel BairuniNo ratings yet
- Us1223254 PDFDocument7 pagesUs1223254 PDFRodrigoPomaNo ratings yet
- 1 ChuquisacaDocument6 pages1 ChuquisacaRodrigoPomaNo ratings yet
- Large Batch Hard Candy and LollipopsDocument2 pagesLarge Batch Hard Candy and LollipopsRodrigoPomaNo ratings yet
- Us1955360 PDFDocument8 pagesUs1955360 PDFRodrigoPomaNo ratings yet
- Us2467764 PDFDocument10 pagesUs2467764 PDFRodrigoPomaNo ratings yet
- Us 4106436Document10 pagesUs 4106436RodrigoPomaNo ratings yet
- Diagrama Bases 1Document1 pageDiagrama Bases 1RodrigoPomaNo ratings yet
- Nov. 25, v1941. J, R, Mcmahon Eral 2,264,048: Apparatus For Applying Protective Coatings T0 SuspendedDocument7 pagesNov. 25, v1941. J, R, Mcmahon Eral 2,264,048: Apparatus For Applying Protective Coatings T0 SuspendedRodrigoPomaNo ratings yet
- Us659197 PDFDocument3 pagesUs659197 PDFRodrigoPomaNo ratings yet
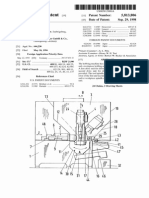
- United States Patent: Dreve, Jr. (45) May 16, 1972Document6 pagesUnited States Patent: Dreve, Jr. (45) May 16, 1972RodrigoPomaNo ratings yet
- US Patent for Cutting Food Products MachineDocument4 pagesUS Patent for Cutting Food Products MachineRodrigoPomaNo ratings yet
- United States Patent: Dreve, Jr. (45) May 16, 1972Document6 pagesUnited States Patent: Dreve, Jr. (45) May 16, 1972RodrigoPomaNo ratings yet
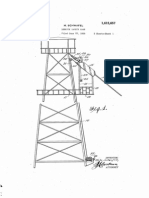
- M. Schwafel: Derrick Safety CageDocument4 pagesM. Schwafel: Derrick Safety CageRodrigoPomaNo ratings yet
- Us 2296645Document4 pagesUs 2296645RodrigoPomaNo ratings yet
- WWW VMQ, I07: Feb. 12, 1963 v. C. BOWMANDocument6 pagesWWW VMQ, I07: Feb. 12, 1963 v. C. BOWMANRodrigoPomaNo ratings yet
- Us2678614 PDFDocument6 pagesUs2678614 PDFRodrigoPomaNo ratings yet
- United States Patent (19) : Grote Et A1Document9 pagesUnited States Patent (19) : Grote Et A1RodrigoPomaNo ratings yet
- Us4589264 PDFDocument6 pagesUs4589264 PDFRodrigoPomaNo ratings yet
- United States Patent (19) : Miiller (45) Date of PatentDocument8 pagesUnited States Patent (19) : Miiller (45) Date of PatentRodrigoPomaNo ratings yet
- June 16, 1964: C. R. Steele Disintegrator Having Downwardly Inclined Baffles Filed Nov. 17, 1960Document6 pagesJune 16, 1964: C. R. Steele Disintegrator Having Downwardly Inclined Baffles Filed Nov. 17, 1960RodrigoPomaNo ratings yet
- Measure cheese with this compact dispenserDocument5 pagesMeasure cheese with this compact dispenserRodrigoPomaNo ratings yet
- Datasheet UA741CPDocument19 pagesDatasheet UA741CPlcruz_86No ratings yet
- MikroDocument5 pagesMikroAmir Si KetengNo ratings yet
- Musical Intelligence: Let's Cut It Off! I Guess You Are Out of TuneDocument1 pageMusical Intelligence: Let's Cut It Off! I Guess You Are Out of TuneHenry GutierrezNo ratings yet
- MXTVXVW PDFDocument3 pagesMXTVXVW PDFRodrigoPomaNo ratings yet
- Cba The GPSDocument7 pagesCba The GPSRodrigoPomaNo ratings yet
- Us116842 PDFDocument6 pagesUs116842 PDFRodrigoPomaNo ratings yet
- H. J. Smith: Potato Cutting Machine 28 Filed 00Document3 pagesH. J. Smith: Potato Cutting Machine 28 Filed 00RodrigoPomaNo ratings yet
- MAKER List OF MATERIAL & EQUIPMENTS - LONGLINEDocument7 pagesMAKER List OF MATERIAL & EQUIPMENTS - LONGLINETri HariyNo ratings yet
- Nquire350 User Guide v1.0.2Document93 pagesNquire350 User Guide v1.0.2Beltran LeivaNo ratings yet
- Macbeth SoliloquysDocument4 pagesMacbeth SoliloquysGavin RobinsonNo ratings yet
- Job ApplicationDocument15 pagesJob ApplicationЮлияNo ratings yet
- Gatsby's False Prophecy of the American DreamDocument14 pagesGatsby's False Prophecy of the American DreamDorottya MagyarNo ratings yet
- 4 Best Ways To Find Blocking Sessions in Oracle 11gDocument5 pages4 Best Ways To Find Blocking Sessions in Oracle 11gMa GodfreyNo ratings yet
- NumericalMethods UofVDocument182 pagesNumericalMethods UofVsaladsamurai100% (1)
- Thomas Nagel CVDocument12 pagesThomas Nagel CVRafaelRocaNo ratings yet
- The Five Basic DoctrinesDocument19 pagesThe Five Basic DoctrinesErwin Mark PobleteNo ratings yet
- Master communication with concise writing and speakingDocument201 pagesMaster communication with concise writing and speakingRam Kumar J0% (1)
- Discourse and Pragmatics: Represented By: Shahad OsamaDocument17 pagesDiscourse and Pragmatics: Represented By: Shahad OsamaLamiaa SadiqNo ratings yet
- Liceo Zapayán English Class Past Continuous Tenses WorksheetDocument2 pagesLiceo Zapayán English Class Past Continuous Tenses WorksheetLeidis De La Cruz MuñozNo ratings yet
- Finite State Machines or Finite AutomataDocument22 pagesFinite State Machines or Finite AutomataSandeep SvsnNo ratings yet
- Dads 2Document15 pagesDads 2aymanmatrixone1No ratings yet
- Reference PageDocument4 pagesReference Pageapi-300865522No ratings yet
- LGUserCSTool LogDocument1 pageLGUserCSTool LogDávison IsmaelNo ratings yet
- Affective AssessmentDocument2 pagesAffective AssessmentCamilla Panghulan100% (2)
- The Impact of Learner Centered Teaching On Students Learning Skills and StrategiesDocument5 pagesThe Impact of Learner Centered Teaching On Students Learning Skills and StrategiesJers GivaNo ratings yet
- Passive ModalsDocument9 pagesPassive ModalsNur Ili SyazwaniNo ratings yet
- Peace at Home, Peace in The World.": M. Kemal AtatürkDocument12 pagesPeace at Home, Peace in The World.": M. Kemal AtatürkAbdussalam NadirNo ratings yet
- SOC/315 Multicultural Matrix AnalysisDocument4 pagesSOC/315 Multicultural Matrix Analysisjesus1287No ratings yet
- Profile Updated JJDocument7 pagesProfile Updated JJDr. J. Josephine JACNo ratings yet