You might also like
- Designs of All Digital Phase Locked Loop: A ReviewDocument5 pagesDesigns of All Digital Phase Locked Loop: A ReviewKoldodeRostovNo ratings yet
- Cas2 Mar 07 DPLL 2Document5 pagesCas2 Mar 07 DPLL 2Fakhrul Risal DjuminginNo ratings yet
- All Digital Phase Locked Loop (ADPLL) Design and SimulationDocument27 pagesAll Digital Phase Locked Loop (ADPLL) Design and SimulationSuresh KumarNo ratings yet
- Delay Lock LoopDocument19 pagesDelay Lock LoopjameelahmadNo ratings yet
- ALL Digital Phase-Locked Loop (ADPLL) : A Survey: Kusum Lata and Manoj KumarDocument5 pagesALL Digital Phase-Locked Loop (ADPLL) : A Survey: Kusum Lata and Manoj KumargezahegnNo ratings yet
- All Digital Phase Locked Loop Design and ImplementationDocument4 pagesAll Digital Phase Locked Loop Design and ImplementationAnton SaitovNo ratings yet
- A Digitally Controlled PLL For Soc Applications: Thomas Olsson, Member, Ieee, and Peter Nilsson, Member, IeeeDocument10 pagesA Digitally Controlled PLL For Soc Applications: Thomas Olsson, Member, Ieee, and Peter Nilsson, Member, IeeeSathish KumarNo ratings yet
- Design of All Digital Phase Locked Loop For WireleDocument5 pagesDesign of All Digital Phase Locked Loop For WireleKiran SomayajiNo ratings yet
- A Phase-Locked Loop With Embedded Analog-to-Digital Converter For Digital ControlDocument7 pagesA Phase-Locked Loop With Embedded Analog-to-Digital Converter For Digital ControlAbhi BhatNo ratings yet
- An All-Digital PLL Clock Multiplier: M PD OSC FilterDocument4 pagesAn All-Digital PLL Clock Multiplier: M PD OSC FilterArun JyothiNo ratings yet
- ADPLL Design and Implementation On FPGADocument6 pagesADPLL Design and Implementation On FPGANavathej BangariNo ratings yet
- ADPLL Digital PhaseLocked Circuit ProjectDocument27 pagesADPLL Digital PhaseLocked Circuit ProjectSteven YuNo ratings yet
- A 2.6Ps - Period-Jitter 900Mhz All-Digital Fractional-N PLL Built With Standard CellsDocument4 pagesA 2.6Ps - Period-Jitter 900Mhz All-Digital Fractional-N PLL Built With Standard CellsRichard SuNo ratings yet
- A 0.6Ghz To 2Ghz Digital PLL With Wide Tracking RangeDocument4 pagesA 0.6Ghz To 2Ghz Digital PLL With Wide Tracking RangeStella SofiaNo ratings yet
- A Software-Based Frequency Locked Loop DC Motor Drive SystemDocument12 pagesA Software-Based Frequency Locked Loop DC Motor Drive SystemMoeed IqbalNo ratings yet
- Low Jitter Adpll Based Clock Generator For High Speed Soc ApplicationsDocument5 pagesLow Jitter Adpll Based Clock Generator For High Speed Soc ApplicationsjubidownNo ratings yet
- A Digitally Controlled Phase Locked Loop With A Digital Phase Frequency Detector For Fast AcquisitionDocument8 pagesA Digitally Controlled Phase Locked Loop With A Digital Phase Frequency Detector For Fast AcquisitionQuas GmallNo ratings yet
- Adaptive TD PLLDocument7 pagesAdaptive TD PLLdilrubaNo ratings yet
- A_Simulink_Model_for_All-Digital-Phase-Locked-LoopDocument4 pagesA_Simulink_Model_for_All-Digital-Phase-Locked-LoopManiNo ratings yet
- Synopsis of ADPLL Design and Implementation On FPGADocument4 pagesSynopsis of ADPLL Design and Implementation On FPGANavathej BangariNo ratings yet
- An575 Introduction To Fpga-Based AdpllsDocument8 pagesAn575 Introduction To Fpga-Based AdpllsDan HauerNo ratings yet
- ADPLL All Digital Phase Locked Loop CircuitsDocument27 pagesADPLL All Digital Phase Locked Loop Circuitsvinod kumarNo ratings yet
- FFT Analysis, Simulation of Computational Model and Netlist Model of Digital Phase Locked LoopDocument16 pagesFFT Analysis, Simulation of Computational Model and Netlist Model of Digital Phase Locked LoopIJSTENo ratings yet
- Design of All Digital Phase Locked LoopDocument4 pagesDesign of All Digital Phase Locked LoopInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Design and Analysis of Phase Locked Loop in 90mm CmosDocument7 pagesDesign and Analysis of Phase Locked Loop in 90mm CmosabhishekNo ratings yet
- Ofc Lab Manual 2Document21 pagesOfc Lab Manual 2Shobhit JainNo ratings yet
- Design of Charge Pump PLLDocument5 pagesDesign of Charge Pump PLLSwati KashtNo ratings yet
- ADPLL PresentationDocument28 pagesADPLL PresentationSaiHarshithaNo ratings yet
- Roll of Engineer FINAL2!3!13Document6 pagesRoll of Engineer FINAL2!3!13Mahendra S. PatilNo ratings yet
- Paper 20Document4 pagesPaper 20Mohamed AhmiedNo ratings yet
- A 0.4-To-3 GHZ Digital PLL With PVT Insensitive Supply Noise Cancellation Using Deter Minis Tic Background CalibrationDocument13 pagesA 0.4-To-3 GHZ Digital PLL With PVT Insensitive Supply Noise Cancellation Using Deter Minis Tic Background CalibrationTeerachot SiriburanonNo ratings yet
- Pulse Triggered Flip Flop Design With Signal Feed Through Scheme Using Conditional Pulse Enhancement TechniqueDocument6 pagesPulse Triggered Flip Flop Design With Signal Feed Through Scheme Using Conditional Pulse Enhancement TechniqueIJSTENo ratings yet
- A 0.0021 mm2 1.82 MW 2.2 GHZ PLL Using Time-Based Integral Control in 65 NM CMOSDocument13 pagesA 0.0021 mm2 1.82 MW 2.2 GHZ PLL Using Time-Based Integral Control in 65 NM CMOSnayakadarsh2000No ratings yet
- ICCSP IEEE Published Paper - ManikanthDocument4 pagesICCSP IEEE Published Paper - ManikanthRamesh NairNo ratings yet
- Fast-Locking Digital DLL with Multiphase OutputsDocument8 pagesFast-Locking Digital DLL with Multiphase OutputsMeshcheryakov SlavaNo ratings yet
- Adpll JSSC 2007Document11 pagesAdpll JSSC 2007陳育楷No ratings yet
- Clear OnDocument6 pagesClear OnAbdalmoedAlaiashyNo ratings yet
- Dual Loop DLLDocument11 pagesDual Loop DLLKiran KNo ratings yet
- Sooho Cha, Chunseok Jeong, Changsik Yoo Joongsik Kih: Abstract - A Digitally Controlled Phase-Locked LoopDocument4 pagesSooho Cha, Chunseok Jeong, Changsik Yoo Joongsik Kih: Abstract - A Digitally Controlled Phase-Locked LoopNguyen Tien HaiNo ratings yet
- The Design of DDS ADPLL Using ARM Micro ControllerDocument15 pagesThe Design of DDS ADPLL Using ARM Micro ControllerIJRASETPublicationsNo ratings yet
- Vlsi Design: Paper Presentation ONDocument8 pagesVlsi Design: Paper Presentation ONYogesh YadavNo ratings yet
- 6.VLSI Architecture Design For Analysis of Fast Locking ADPLL Via Feed Forward Compensation Algorithm (33-38)Document6 pages6.VLSI Architecture Design For Analysis of Fast Locking ADPLL Via Feed Forward Compensation Algorithm (33-38)ijcctsNo ratings yet
- DatasheetDocument5 pagesDatasheetDeepak KumarNo ratings yet
- Implementation of Digital QPSK Modulator by Using VHDL / MatlabDocument5 pagesImplementation of Digital QPSK Modulator by Using VHDL / Matlabblesson123No ratings yet
- A 0.52/1 V Fast Lock-In ADPLL For Supporting Dynamic Voltage and Frequency ScalingDocument5 pagesA 0.52/1 V Fast Lock-In ADPLL For Supporting Dynamic Voltage and Frequency ScalingDeep SahaniNo ratings yet
- Frequency Modulation of System Clocks For EMI Reduction: by Cornelis D. HoekstraDocument7 pagesFrequency Modulation of System Clocks For EMI Reduction: by Cornelis D. HoekstraKesavant TkesavanNo ratings yet
- Fpga Implementation of A Phase Locked Loop Based On RandomDocument6 pagesFpga Implementation of A Phase Locked Loop Based On Random9638042No ratings yet
- PLL DividerDocument6 pagesPLL Divider081270No ratings yet
- Injection-Locked Clock andDocument12 pagesInjection-Locked Clock andAnonymous e4UpOQEPNo ratings yet
- A Loop Gain Optimization Technique For IntegerTDC-Based Phase-Locked LoopsDocument10 pagesA Loop Gain Optimization Technique For IntegerTDC-Based Phase-Locked Loops孫世洋No ratings yet
- Kundu Et Al - 2019 - A Fully Integrated Digital LDO With Built-In Adaptive Sampling and ActiveDocument12 pagesKundu Et Al - 2019 - A Fully Integrated Digital LDO With Built-In Adaptive Sampling and Active马晓飞No ratings yet
- Digital Phase Lock LoopsDocument17 pagesDigital Phase Lock LoopsArfaaNaseemNo ratings yet
- Design of Integer N Frequency Divider For High Performance PLL Using 180 NM CMOS TechnologyDocument8 pagesDesign of Integer N Frequency Divider For High Performance PLL Using 180 NM CMOS Technology123abhijeetNo ratings yet
- Design and Implementation of Early-Late Gate Bit Synchronizer For Satellite CommunicationDocument4 pagesDesign and Implementation of Early-Late Gate Bit Synchronizer For Satellite CommunicationMatthew CarterNo ratings yet
- An Efficient Differential Conditional Capturing Energy Recovery Flip-Flop DesignDocument6 pagesAn Efficient Differential Conditional Capturing Energy Recovery Flip-Flop DesignRaghul RamasamyNo ratings yet
- A Sub-Mw Fractional-N Adpll With Fom Of: 246 DB For Iot ApplicationsDocument13 pagesA Sub-Mw Fractional-N Adpll With Fom Of: 246 DB For Iot ApplicationsSAMNo ratings yet
- High Resolution Digital-To-Time Converter For Low Jitter Digital PllsDocument4 pagesHigh Resolution Digital-To-Time Converter For Low Jitter Digital PllsroomaNo ratings yet
- Digital Signal Processing: Instant AccessFrom EverandDigital Signal Processing: Instant AccessRating: 3.5 out of 5 stars3.5/5 (2)
- The Women's Health Fast-Track Tone-Up Plan: The Greatest Workout You'll Ever Get-Inside A Gym, or Out DirectionsDocument5 pagesThe Women's Health Fast-Track Tone-Up Plan: The Greatest Workout You'll Ever Get-Inside A Gym, or Out DirectionsSoha HamedNo ratings yet
- Weightloss Training Plan 1 4 PDFDocument1 pageWeightloss Training Plan 1 4 PDFSoha HamedNo ratings yet
- Run To Lose Program Training PlanDocument1 pageRun To Lose Program Training PlanSoha HamedNo ratings yet
- All Digital Phase Locked Loop Design and ImplementationDocument4 pagesAll Digital Phase Locked Loop Design and ImplementationAnton SaitovNo ratings yet
- Digital PLL Cicc Tutorial PerrottDocument118 pagesDigital PLL Cicc Tutorial PerrottSwethaVellankiNo ratings yet
- TSG Surge Reduction Filter, Three Phase - TSGSRF3630Document2 pagesTSG Surge Reduction Filter, Three Phase - TSGSRF3630Angela TienNo ratings yet
- St. Andrew's Junior College JC2 2015 Preliminary Exam Physics Paper 2Document24 pagesSt. Andrew's Junior College JC2 2015 Preliminary Exam Physics Paper 2VarshLokNo ratings yet
- N2006 PidDocument8 pagesN2006 PidSarah KempNo ratings yet
- 2090 CSWM1DF 14aa05 PDFDocument132 pages2090 CSWM1DF 14aa05 PDFsoayNo ratings yet
- Long Life 12V 100Ah Gel Battery for Telecom, UPS, and Emergency PowerDocument2 pagesLong Life 12V 100Ah Gel Battery for Telecom, UPS, and Emergency PowerIwhan KristantoNo ratings yet
- Root Category: # Free Space (1 Part(s) )Document1 pageRoot Category: # Free Space (1 Part(s) )MiguelNo ratings yet
- AD8232-EVALZ User Guide: Evaluating The Single-Lead Heart Rate Monitor Front EndDocument8 pagesAD8232-EVALZ User Guide: Evaluating The Single-Lead Heart Rate Monitor Front EndBorislav GanevNo ratings yet
- Government of Kerala public works department schedule of rates for electrical materials 2008Document106 pagesGovernment of Kerala public works department schedule of rates for electrical materials 2008Kamal ShaikNo ratings yet
- Design Optimazation and Simulation of PMSM Based On Maxwell and Twinbuilder For EvsDocument6 pagesDesign Optimazation and Simulation of PMSM Based On Maxwell and Twinbuilder For EvsMayur DeokarNo ratings yet
- Cylindrical Proximity Magnetic Sensors for Detection of Ferrous TargetsDocument2 pagesCylindrical Proximity Magnetic Sensors for Detection of Ferrous TargetsTenuka pereraNo ratings yet
- CDJ 100SDocument28 pagesCDJ 100SMarcos ZanelliNo ratings yet
- Accessory Cable GuideDocument9 pagesAccessory Cable GuideCarmelo BayonNo ratings yet
- Essay On Corrosion - Baimourne BournebeDocument4 pagesEssay On Corrosion - Baimourne BournebeBAIMOURNE BOURNEBENo ratings yet
- Maxwell Stress TensorDocument8 pagesMaxwell Stress Tensorkushaldave227No ratings yet
- Energies: Analysis and Design of High-Efficiency Bidirectional Gan-Based CLLC Resonant ConverterDocument13 pagesEnergies: Analysis and Design of High-Efficiency Bidirectional Gan-Based CLLC Resonant ConverterThien DinhNo ratings yet
- Apostila CLP Omrom BRDocument671 pagesApostila CLP Omrom BRreinaldopf2011No ratings yet
- Is 15652Document3 pagesIs 15652IshanNo ratings yet
- Error List For Mitsubishi HeavyDocument54 pagesError List For Mitsubishi HeavynovyNo ratings yet
- Extremely Inverse Time Overcurrent CDG14 PDFDocument6 pagesExtremely Inverse Time Overcurrent CDG14 PDFkarqu86No ratings yet
- XGN15 Ring Main Unit User's ManualDocument21 pagesXGN15 Ring Main Unit User's ManualFrancisco VeraNo ratings yet
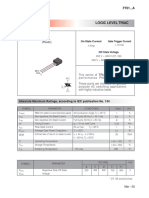
- LOGIC LEVEL TRIAC TECHNICAL SPECIFICATIONSDocument4 pagesLOGIC LEVEL TRIAC TECHNICAL SPECIFICATIONSAnatoly WolkoffNo ratings yet
- SW32V Operating Manual e ZIEHL 2017-05-03Document22 pagesSW32V Operating Manual e ZIEHL 2017-05-03Jatupol PongsirisartNo ratings yet
- MCQ LCR Circuits Master-1Document14 pagesMCQ LCR Circuits Master-1Deepak Choudhary DCNo ratings yet
- Final Earthing V3Document22 pagesFinal Earthing V3RewanEsamNo ratings yet
- UM Faculty of Science and Technology Lab Report: Measuring Efficiency and Waveforms of an Electric MachineDocument6 pagesUM Faculty of Science and Technology Lab Report: Measuring Efficiency and Waveforms of an Electric MachineJIayu ZhangNo ratings yet
- Design of EHV SubstationDocument66 pagesDesign of EHV SubstationMadanasekhar Tadimarri100% (1)
- Long Transmission LinesDocument11 pagesLong Transmission LinesPao Castillon50% (2)
- Electronic Instrument Handbook Third EditionDocument1,217 pagesElectronic Instrument Handbook Third Editionhashemowida100% (39)
- Eletric TractionDocument21 pagesEletric TractionGowri Sri Gowri75% (4)
- Electrical Vendor ListDocument11 pagesElectrical Vendor Listshantanu11181No ratings yet