You might also like
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- PID Control - ARAKIDocument23 pagesPID Control - ARAKILuiz Carlos da SilvaNo ratings yet
- Discrete State Process ControlDocument37 pagesDiscrete State Process ControlVon JinNo ratings yet
- EE2401 PSOC Notes - PDF-WWW - Chennaiuniversity.net - Unlocked PDFDocument20 pagesEE2401 PSOC Notes - PDF-WWW - Chennaiuniversity.net - Unlocked PDFClement RajNo ratings yet
- Introduction To Control SystemsDocument28 pagesIntroduction To Control SystemsAK MizanNo ratings yet
- Control Systems IMP QUESTIONSDocument8 pagesControl Systems IMP QUESTIONSHarika HarikaNo ratings yet
- EI2402-Logic and Distributed Control SystemDocument56 pagesEI2402-Logic and Distributed Control SystemJaibhavani SivajiNo ratings yet
- MTDC System PDFDocument17 pagesMTDC System PDFAshok Kumar67% (3)
- EE2253 NotesDocument124 pagesEE2253 NotesSiva Kathikeyan100% (1)
- Ei1252 - Transducer EngineeringDocument18 pagesEi1252 - Transducer Engineeringguru.rjpmNo ratings yet
- Direct Energy Conversion Lecture I PDFDocument11 pagesDirect Energy Conversion Lecture I PDFAftab Ali Afridi33% (3)
- Short Term Hydro Thermal SchedulingDocument27 pagesShort Term Hydro Thermal Schedulingrajendra_senapati100% (2)
- Two Marks Questions and AnswersDocument5 pagesTwo Marks Questions and Answerssudhasesh2000No ratings yet
- Lecture Note Chapter 11 PID Controller Design Tuning and Troubleshooting 2016Document61 pagesLecture Note Chapter 11 PID Controller Design Tuning and Troubleshooting 2016Rama KrishnaNo ratings yet
- Introduction to Instrumentation MeasurementDocument126 pagesIntroduction to Instrumentation MeasurementbelaynehNo ratings yet
- Cs2403 Digital Signal Processing NotesDocument106 pagesCs2403 Digital Signal Processing NotesRaja SekarNo ratings yet
- Focussed Question Bank With AnswersDocument18 pagesFocussed Question Bank With AnswersHari Krishnan100% (1)
- Measurement of Three Phase PowerDocument4 pagesMeasurement of Three Phase PowerPriya JakoonNo ratings yet
- Ee1352 Electrical Machine Design 2 Marks Question Bank PDFDocument21 pagesEe1352 Electrical Machine Design 2 Marks Question Bank PDFvigneshwaran anguchamyNo ratings yet
- PID ControlDocument22 pagesPID ControlJessica RossNo ratings yet
- Ec6405 - Control System Engineering Questions and Answers Unit - I Control System Modeling Two MarksDocument53 pagesEc6405 - Control System Engineering Questions and Answers Unit - I Control System Modeling Two MarksSaravanan Pazapughal100% (1)
- Instrumentation NotesDocument117 pagesInstrumentation NoteshussainNo ratings yet
- Signals and Systems: BooksDocument1 pageSignals and Systems: Booksfaizan bariNo ratings yet
- Digital Controlled System Lab Manual PDFDocument43 pagesDigital Controlled System Lab Manual PDFsoumencha100% (3)
- Literature Review of PID Controller Based On Various Soft Computing TechniquesDocument4 pagesLiterature Review of PID Controller Based On Various Soft Computing TechniquesEditor IJRITCCNo ratings yet
- Short Term Hydro Thermal SchedulingDocument30 pagesShort Term Hydro Thermal Schedulingrajendra_senapati67% (3)
- Simplified Analysis of Graetz CircuitDocument42 pagesSimplified Analysis of Graetz CircuitKaran Singhania100% (3)
- DC Motor Speed ControlDocument24 pagesDC Motor Speed ControlSumu Talal50% (2)
- Utilization of Electric PowerDocument1 pageUtilization of Electric PowerAbhimita GaineNo ratings yet
- M.tech ThesisDocument59 pagesM.tech ThesisRama Krishna100% (1)
- 3 Phase-Controlled DC Motor DrivesDocument45 pages3 Phase-Controlled DC Motor DrivesgilmartNo ratings yet
- Study of Wireless Power Transfer SynopsisDocument9 pagesStudy of Wireless Power Transfer SynopsisAnkitha G NayakaNo ratings yet
- Ee 1403 Solid State DrivesDocument14 pagesEe 1403 Solid State DrivesPanchi AgrawalNo ratings yet
- 1 Lab Manual-Final-Control-System-1Document35 pages1 Lab Manual-Final-Control-System-1Shimalis RetaNo ratings yet
- Evaluation of The Transient Response of A DC MotorDocument6 pagesEvaluation of The Transient Response of A DC MotorNesuh MalangNo ratings yet
- QUESTION BANK of Control Systems Engineering PDFDocument12 pagesQUESTION BANK of Control Systems Engineering PDFMouhanit LimbachiyaNo ratings yet
- Chapter Four: DC-DC Conversion: DC ChoppersDocument55 pagesChapter Four: DC-DC Conversion: DC Choppersfor lifeNo ratings yet
- Basic Electrical and Instrumentation Engineering - Lecture Notes, Study Material and Important Questions, AnswersDocument25 pagesBasic Electrical and Instrumentation Engineering - Lecture Notes, Study Material and Important Questions, AnswersM.V. TVNo ratings yet
- Sliding Mode Control of DC MotorDocument5 pagesSliding Mode Control of DC MotorPham Quoc ThienNo ratings yet
- Closed loop temperature controlDocument6 pagesClosed loop temperature controlsjsujiprasadNo ratings yet
- GTO RectifierDocument13 pagesGTO RectifierBijay PoudelNo ratings yet
- Control Systems 2825: Dr. Mohammad Abdelrahman Semester I 2014/2015Document54 pagesControl Systems 2825: Dr. Mohammad Abdelrahman Semester I 2014/2015Nur AdlinaNo ratings yet
- Review of Pole Placement & Pole Zero Cancellation Method For Tuning PID Controller of A Digital Excitation Control SystemDocument10 pagesReview of Pole Placement & Pole Zero Cancellation Method For Tuning PID Controller of A Digital Excitation Control SystemIJSTENo ratings yet
- 01.anatomy of A Feedback Control SystemDocument8 pages01.anatomy of A Feedback Control SystemMahesh GonuguntlaNo ratings yet
- CS Lecture Notes Units 1 2 3Document88 pagesCS Lecture Notes Units 1 2 3sushinkNo ratings yet
- Modeling Dynamic SystemsDocument48 pagesModeling Dynamic SystemssepehrNo ratings yet
- Solution Control System Engineering Nagrath GopalDocument2 pagesSolution Control System Engineering Nagrath Gopalganesharun123No ratings yet
- Measurements and Instrumentation Unit 1Document62 pagesMeasurements and Instrumentation Unit 1Patel DipenNo ratings yet
- Chapter 3 - Continuously Process ControlDocument84 pagesChapter 3 - Continuously Process ControlVon Jin100% (1)
- Measurement of VelocityDocument59 pagesMeasurement of VelocityYogeshBhatt100% (1)
- Polar & Nyquist Plots MCQDocument18 pagesPolar & Nyquist Plots MCQRajeev Singh BishtNo ratings yet
- MC Faculty InteractionDocument5 pagesMC Faculty InteractionRadhika AjadkaNo ratings yet
- Design and Implementation Speed Control System of PDFDocument8 pagesDesign and Implementation Speed Control System of PDFvince kafuaNo ratings yet
- Fuzzy Gain Scheduling of PID Controllers PDFDocument7 pagesFuzzy Gain Scheduling of PID Controllers PDFMiguel ZeaNo ratings yet
- Ec 2254 Linear Integrated CircuitsDocument376 pagesEc 2254 Linear Integrated CircuitsPavan Kumar100% (1)
- Documents Required For F1 Visa InterviewDocument2 pagesDocuments Required For F1 Visa InterviewSanthosh KumarNo ratings yet
- Ece II To Viii - SyllabusDocument120 pagesEce II To Viii - SyllabusMage NatarajanNo ratings yet
- Changing Gender RolesDocument7 pagesChanging Gender RolesSanthosh KumarNo ratings yet
- Capacitor Datasheet.1 3Document3 pagesCapacitor Datasheet.1 3Santhosh KumarNo ratings yet
- MatlabDocument3 pagesMatlabSanthosh KumarNo ratings yet
- Number of institutions with selected options in IndiaDocument242 pagesNumber of institutions with selected options in IndiaSanthosh KumarNo ratings yet
- DSD Unit 5Document49 pagesDSD Unit 5Santhosh KumarNo ratings yet
- EI2353-Digital System DesignDocument13 pagesEI2353-Digital System DesignSanthosh KumarNo ratings yet
- Question BankDocument12 pagesQuestion BankSanthosh KumarNo ratings yet
- Easwari Engineering college embedded system question banksDocument12 pagesEaswari Engineering college embedded system question banksSanthosh KumarNo ratings yet
- Everything You Need to Know About DiathermyDocument23 pagesEverything You Need to Know About DiathermySanthosh KumarNo ratings yet
- Places To Eat in Chennai (Contains Till March)Document14 pagesPlaces To Eat in Chennai (Contains Till March)Santhosh KumarNo ratings yet
- Places To Eat in Chennai (Contains Till March)Document14 pagesPlaces To Eat in Chennai (Contains Till March)Santhosh KumarNo ratings yet
- Nuclei QB XiiDocument23 pagesNuclei QB XiiToshani GuptaNo ratings yet
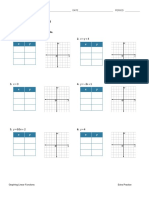
- Mathematics Online WWW - Mathematicsonline.co - in Three Dimensional Coordinate Assignment 3Document5 pagesMathematics Online WWW - Mathematicsonline.co - in Three Dimensional Coordinate Assignment 3Karm VeerNo ratings yet
- Semester 1 Examinations 2018/2019: Programme (S)Document6 pagesSemester 1 Examinations 2018/2019: Programme (S)fuckoffmanNo ratings yet
- H 103 - ISO - Rev10 - INGDocument1 pageH 103 - ISO - Rev10 - INGandersmorais86No ratings yet
- Genetic Algorithms in OptimizationDocument38 pagesGenetic Algorithms in OptimizationssbhonsaleNo ratings yet
- 1Document10 pages1Amit KumarNo ratings yet
- Chemistry Quarter 1 ModuleDocument43 pagesChemistry Quarter 1 ModuleKALI REICHERTNo ratings yet
- VTC 18MAT31 QP-Scheme-1Document55 pagesVTC 18MAT31 QP-Scheme-1Maithira HNo ratings yet
- Divine Particles Pressnote by Sanatan SansthaDocument4 pagesDivine Particles Pressnote by Sanatan SansthaHaindava KeralamNo ratings yet
- Providing Optimized Alignment & Automatic Interchange Design Software TutorialDocument11 pagesProviding Optimized Alignment & Automatic Interchange Design Software Tutorialadera1No ratings yet
- Emft Iii (T2)Document73 pagesEmft Iii (T2)athembo georgeNo ratings yet
- EditDocument2 pagesEditEvey HernándezNo ratings yet
- Implementing A Virtual TrackballDocument4 pagesImplementing A Virtual Trackballkinny1974No ratings yet
- AbbrebiationDocument8 pagesAbbrebiationMahade Hasan DipuNo ratings yet
- Astm d6218-00Document19 pagesAstm d6218-00Francisco DelgadoNo ratings yet
- ENG1002 Project 2 SpecificationDocument6 pagesENG1002 Project 2 SpecificationChiu Park ChuanNo ratings yet
- Pumping Stations Design Recommendations FlygtDocument28 pagesPumping Stations Design Recommendations FlygtjosegabrielrosasNo ratings yet
- Assignment # 4 MomentsDocument9 pagesAssignment # 4 MomentsKalidNo ratings yet
- Fast Fourier Transform (FFT) (Theory and Implementation)Document59 pagesFast Fourier Transform (FFT) (Theory and Implementation)Suman BasakNo ratings yet
- Electropneumatic and Hydraulic DNT241: Experiment No. 4Document7 pagesElectropneumatic and Hydraulic DNT241: Experiment No. 4Izz Hanzalah AhmadNo ratings yet
- Online Courses From Top UniversitiesDocument3 pagesOnline Courses From Top Universitiesephrem0% (2)
- Thermal Physics Question BankDocument6 pagesThermal Physics Question BankpranavabaascaranNo ratings yet
- Three-Phase Power Flow Calculations Using Direct ZBUS Method For Large-Scale Unbalanced Distribution NetworksDocument8 pagesThree-Phase Power Flow Calculations Using Direct ZBUS Method For Large-Scale Unbalanced Distribution NetworksApikShafieeNo ratings yet
- Work Sheet IDocument5 pagesWork Sheet IgrmdrjNo ratings yet
- The PA Bible Addn 13 The Electric Guitar Loudspeaker PDFDocument3 pagesThe PA Bible Addn 13 The Electric Guitar Loudspeaker PDFjosiasns5257No ratings yet
- Rabin CryptosystemDocument41 pagesRabin CryptosystemArkadev GhoshNo ratings yet
- Alg Lesson 4-1Document4 pagesAlg Lesson 4-1Camilo MartinezNo ratings yet
- MODEL QUESTIONS (Lasers and Optical Fibers) Oct-2023Document2 pagesMODEL QUESTIONS (Lasers and Optical Fibers) Oct-2023shettysohan79No ratings yet
- Metals and AlloysDocument34 pagesMetals and AlloyszenrockNo ratings yet
- Electrostatics MC Chapter 1Document30 pagesElectrostatics MC Chapter 1James LiNo ratings yet