You might also like
- Problemas Roca Vila 1Document8 pagesProblemas Roca Vila 1Claude Caceres MalpicaNo ratings yet
- Vibraciones libres de sistemas de un grado de libertadDocument17 pagesVibraciones libres de sistemas de un grado de libertadVickman PenagosNo ratings yet
- Codigo en Matlab para Un Grado de LibertadDocument8 pagesCodigo en Matlab para Un Grado de LibertadJavier Paredes AvilaNo ratings yet
- Solucionario de La PC1Document12 pagesSolucionario de La PC1Baki HanmaNo ratings yet
- Práctica 4 - Lab Control Moderno FIME - UANLDocument6 pagesPráctica 4 - Lab Control Moderno FIME - UANLFabiànGarcìaNo ratings yet
- PAula 3Document2 pagesPAula 3alexNo ratings yet
- Clase 3Document14 pagesClase 3A Zenitram Fan de Pvz2No ratings yet
- Tipos de AmortiguamientoDocument4 pagesTipos de AmortiguamientoDanperdomoNo ratings yet
- Práctica 4 Dinámica AplicadaDocument1 pagePráctica 4 Dinámica AplicadaJohacim CookNo ratings yet
- Vibra Excitacion de Base 2019-1Document15 pagesVibra Excitacion de Base 2019-1R S Castro ChumpitazNo ratings yet
- Apunte Emparrillado Metodo de Las FuerzasDocument3 pagesApunte Emparrillado Metodo de Las FuerzasMatias MatiasNo ratings yet
- Ensayo Comparación de Análisis Matricial y Métodos TradicionalesDocument15 pagesEnsayo Comparación de Análisis Matricial y Métodos TradicionalesCarlos Darwin Leon VillalobosNo ratings yet
- Vibraciones LibresDocument42 pagesVibraciones LibresEloy ToroNo ratings yet
- Armaduras 2DDocument30 pagesArmaduras 2Domar leyva acevedoNo ratings yet
- Solución Problemas-Sesión 5Document26 pagesSolución Problemas-Sesión 5edgar046100% (1)
- 3 2 Desbalanceo Rotatorio y Cabeceo de Flechas Rotatorias y Elementos RotativosDocument22 pages3 2 Desbalanceo Rotatorio y Cabeceo de Flechas Rotatorias y Elementos RotativosJose ReginoNo ratings yet
- Paper Sistemas Continuos y DiscretosDocument3 pagesPaper Sistemas Continuos y DiscretosAndrés Alejandro ColomaNo ratings yet
- MASAS-MUELLES-OSCILACIONESDocument4 pagesMASAS-MUELLES-OSCILACIONESJosé Alejandro Vargas0% (1)
- Ecuaciones de Navier-Stokes y conservación de la masa para fluidosDocument12 pagesEcuaciones de Navier-Stokes y conservación de la masa para fluidosemd1966No ratings yet
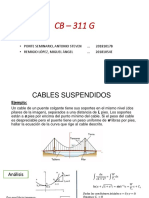
- 2 Cables Suspendidos - GDocument3 pages2 Cables Suspendidos - GAnonimus290599No ratings yet
- Ejercicio Resuelto Sistema de Edo en MatlabDocument4 pagesEjercicio Resuelto Sistema de Edo en Matlabcamilassoto_roNo ratings yet
- Breve Historia Del Método de Los Elementos FinitosDocument4 pagesBreve Historia Del Método de Los Elementos FinitosDaniel GonzalezNo ratings yet
- Ejercicios de VibracionesDocument4 pagesEjercicios de VibracionesViLlanueva Victor0% (1)
- Sistemas de Múltiples Grados de LibertadDocument25 pagesSistemas de Múltiples Grados de LibertadMakBuck100% (1)
- Practica 1 MEDICIÓN DE RESISTENCIA PDFDocument3 pagesPractica 1 MEDICIÓN DE RESISTENCIA PDFBarbara TrejoNo ratings yet
- Dinámica de Sistemas de N Grados de LibertadDocument19 pagesDinámica de Sistemas de N Grados de Libertadjonypres19No ratings yet
- Evaluación examen vibraciones mecánicasDocument30 pagesEvaluación examen vibraciones mecánicasEdwin Paco Poveda100% (1)
- Introducción al método de elementos finitos para resolver problemas de resistencia de materialesDocument5 pagesIntroducción al método de elementos finitos para resolver problemas de resistencia de materiales081ac10426100% (2)
- Capitulo 2Document90 pagesCapitulo 2Axel AlvarezNo ratings yet
- Tres barras de acero soportan carga P=8.5KipDocument4 pagesTres barras de acero soportan carga P=8.5KipMERCY BARROSONo ratings yet
- 03 Respuesta de Un Oscilador SimpleDocument17 pages03 Respuesta de Un Oscilador SimpleeduardoNo ratings yet
- Clase 11 - Flexion CompuestaDocument21 pagesClase 11 - Flexion CompuestalalalaNo ratings yet
- TALLER (Dinámica)Document6 pagesTALLER (Dinámica)Sweet MeryNo ratings yet
- Vibración Libre No AmortiguadaDocument20 pagesVibración Libre No Amortiguadaisai martinez ruiz0% (1)
- Practica 1 Mec 2441Document2 pagesPractica 1 Mec 2441Israel Abecia JimenezNo ratings yet
- Elementos Finitos-Metodo DirectoDocument74 pagesElementos Finitos-Metodo DirectoBryanBarzalloNo ratings yet
- Vibraciones MecanicasDocument12 pagesVibraciones MecanicasNelson Oróstica LafferteNo ratings yet
- Aislamiento de Vibraciones y Transmisibilidad de FuerzasDocument16 pagesAislamiento de Vibraciones y Transmisibilidad de FuerzasRamós Girón CarlosNo ratings yet
- Obras Civiles Casa de Máquinas en Centrales HidroeléctricasDocument4 pagesObras Civiles Casa de Máquinas en Centrales Hidroeléctricascarg29No ratings yet
- Vibración LibreDocument56 pagesVibración LibreMiguel0% (1)
- Esfuerzos Permisibles A Compresión en El AceroDocument25 pagesEsfuerzos Permisibles A Compresión en El AceroAlbert SjNo ratings yet
- Con A VanDocument473 pagesCon A VanRigan Eloy Pérez PacoriNo ratings yet
- 180B0699 CristianLagunes X3Document2 pages180B0699 CristianLagunes X3cristian lagunesNo ratings yet
- Ejemplo-5p5 p149 r4 Esfuerzo-PlanoDocument13 pagesEjemplo-5p5 p149 r4 Esfuerzo-Planoingeniero1986No ratings yet
- Vibraciones Libres Con Amortiguamiento ViscosoDocument11 pagesVibraciones Libres Con Amortiguamiento ViscosoCairo Ulloa100% (1)
- Sub AmortiguadoDocument3 pagesSub AmortiguadoCristian TipantuñaNo ratings yet
- Sistemas Amortiguados de Dos Grados de LibertadDocument16 pagesSistemas Amortiguados de Dos Grados de LibertadXavier Freire ZamoraNo ratings yet
- Vibraciones AmortiguadasDocument10 pagesVibraciones AmortiguadasLuis Anaya LopezNo ratings yet
- Vibraciones MecanicasDocument26 pagesVibraciones MecanicasNego LaraNo ratings yet
- Oscilaciones ApuntesDocument20 pagesOscilaciones ApuntesKoke CallejasNo ratings yet
- Sistema Masa-Resorte Movimiento Forzado Con AmortiguamientoDocument7 pagesSistema Masa-Resorte Movimiento Forzado Con AmortiguamientoGomez Guzman0% (1)
- Capitulo 01 Del Libro de Análisis DinámicoDocument22 pagesCapitulo 01 Del Libro de Análisis DinámicoIngDavidFNo ratings yet
- Vibraciones Libres - TRABAJO 1Document7 pagesVibraciones Libres - TRABAJO 1Fernando Vilca CoronadoNo ratings yet
- Capítulo 2 Cinética de La PartículaDocument55 pagesCapítulo 2 Cinética de La PartículaGuillermo Gutierrez100% (1)
- Cinética de la Partícula: Las Leyes de NewtonDocument55 pagesCinética de la Partícula: Las Leyes de NewtonRomario Villaca LauraNo ratings yet
- SISTEMA SUBAMORTIGUADODocument3 pagesSISTEMA SUBAMORTIGUADOEdison BenitezNo ratings yet
- Vibracion LibreDocument14 pagesVibracion LibreAntonio Zamora86% (7)
- Resonancia FísicaDocument11 pagesResonancia FísicaOMAR ALEJANDRO LONGORIA VAZQUEZNo ratings yet
- Practica 2.modelado y Simulación de Sistemas DinamicosDocument11 pagesPractica 2.modelado y Simulación de Sistemas DinamicosGerald Saint Silva Urdaneta100% (1)
- HouseholderDocument18 pagesHouseholdergonzalo_cuadra_6No ratings yet
- HouseholderDocument18 pagesHouseholdergonzalo_cuadra_6No ratings yet
- Cap4 Timoshenko VibracionesDocument42 pagesCap4 Timoshenko Vibracionesgonzalo_cuadra_6No ratings yet
- Cap1 Timoshenko VibracionesDocument72 pagesCap1 Timoshenko VibracionesAnonymous CjYoAdNo ratings yet
- Equipos MinerosDocument9 pagesEquipos Minerosgonzalo_cuadra_6No ratings yet
- Modulo 1Document19 pagesModulo 1lisday RojasNo ratings yet
- CyberciegeDocument12 pagesCyberciegeMt A.No ratings yet
- Sesion 3asutDocument5 pagesSesion 3asutmonchyteeducaNo ratings yet
- StestDocument2 pagesStestKevinNo ratings yet
- bt8 Herramientas Empresa 2014Document48 pagesbt8 Herramientas Empresa 2014Cecilia Hernandez CruzNo ratings yet
- PROPUESTA TECNICA-ECONOMICA CarreteraDocument6 pagesPROPUESTA TECNICA-ECONOMICA CarreteraWilber Guillen0% (1)
- Reactores - Asociacion de Reactores de FlujoDocument11 pagesReactores - Asociacion de Reactores de FlujoAlesia DelfinoNo ratings yet
- Derecho LaboralDocument19 pagesDerecho LaboralDanielle CarreñoNo ratings yet
- Semiología Del Lenguaje Oral ReligiosoDocument169 pagesSemiología Del Lenguaje Oral ReligiosoGerman OlacireguiNo ratings yet
- Cuadro Comparativo Sistemas de Trabajo EnfermeriaDocument3 pagesCuadro Comparativo Sistemas de Trabajo EnfermeriaEloisa Cervantes100% (2)
- 4 Hoy GeometriaDocument5 pages4 Hoy Geometriacarlos medinaNo ratings yet
- Wa0003.Document3 pagesWa0003.Samantha RodriguezNo ratings yet
- Caminos I Trazo de GradienteDocument25 pagesCaminos I Trazo de GradienteFatima Villavicencio FigueroaNo ratings yet
- Fisiologia y Metabolismo BacterianoDocument16 pagesFisiologia y Metabolismo BacterianoAbraham YehezkelNo ratings yet
- Operaciones de SuperficieDocument38 pagesOperaciones de Superficiesergio 2008No ratings yet
- SEMANA3.1 - Fracciones IDocument17 pagesSEMANA3.1 - Fracciones IKarem Sheyla Pardave torpocoNo ratings yet
- 1 PBDocument2 pages1 PBAnedConfiturasNo ratings yet
- Fundamentos de La Educación InicialDocument11 pagesFundamentos de La Educación InicialConsuelo Rios Flores67% (3)
- Informe de Separación de Mezcla-1Document23 pagesInforme de Separación de Mezcla-1Adriana Lucia Florez solorzanoNo ratings yet
- Garcero SirivanaDocument8 pagesGarcero SirivanajimenamartindiazNo ratings yet
- Claude CuentoDocument14 pagesClaude CuentoGuille DucretNo ratings yet
- Los Sensores de Proximidad InductivosDocument21 pagesLos Sensores de Proximidad InductivosnestorflowNo ratings yet
- Proyecto de Sistemas DigitalesDocument13 pagesProyecto de Sistemas DigitalesSamuel White RospigliozziNo ratings yet
- Taller de Energía y TrabajoDocument2 pagesTaller de Energía y TrabajoWilliam ramon Matamba delgadoNo ratings yet
- Opinion DesfavorableDocument2 pagesOpinion DesfavorableMARLON ENRIQUE ORTIZ FLORESNo ratings yet
- Lineamientos para Hacer DiapositivasDocument24 pagesLineamientos para Hacer Diapositivascdjgp100% (1)
- Guia de Aplicacion Normas IncontecDocument25 pagesGuia de Aplicacion Normas IncontecKRTODGNo ratings yet
- Unidad Iii-Tarea IiiDocument6 pagesUnidad Iii-Tarea IiiDermys emma Fernandez27No ratings yet
- Ejercicios Formas CanonicasDocument2 pagesEjercicios Formas CanonicasCésar David RomeroNo ratings yet
- Normas Que Establecen Los Requisitos Arquitectónicos y de EquipamientoDocument5 pagesNormas Que Establecen Los Requisitos Arquitectónicos y de EquipamientoMariaNo ratings yet