You might also like
- Dynamic Simulation of A Three-Phase Induction Motor Using Matlab SimulinkDocument5 pagesDynamic Simulation of A Three-Phase Induction Motor Using Matlab SimulinkMallikarjunBhiradeNo ratings yet
- Dynamic Modeling and Simulation of A 3-HP Asynchronous Motor Driving A Mechanical LoadDocument6 pagesDynamic Modeling and Simulation of A 3-HP Asynchronous Motor Driving A Mechanical LoadpablitoNo ratings yet
- Dynamic D-Q Axis Modeling of Three-Phase Asynchronous Machine Using MatlabDocument10 pagesDynamic D-Q Axis Modeling of Three-Phase Asynchronous Machine Using MatlabTaoufikElKanouniNo ratings yet
- DQ Modeling and Dynamic CharacteristicsDocument9 pagesDQ Modeling and Dynamic CharacteristicsNAENWI YAABARINo ratings yet
- Modeling and Simulation of Reluctance Motor Using Digital ComputerDocument5 pagesModeling and Simulation of Reluctance Motor Using Digital ComputerroyourboatNo ratings yet
- Dynamic Model Analysis of Three Phase Induction Motor Using Matlab SimulinkDocument6 pagesDynamic Model Analysis of Three Phase Induction Motor Using Matlab SimulinkSuhail Ahmad SuhailNo ratings yet
- Modelling &simulation of A Three-Phase Electric Traction Induction Motor Using Matlab SimulinkDocument7 pagesModelling &simulation of A Three-Phase Electric Traction Induction Motor Using Matlab SimulinkkrcdewanewNo ratings yet
- Dynamic Analysis of Synchronous Reluctance Motor Drives Based On Simulink and Finite Element ModelDocument5 pagesDynamic Analysis of Synchronous Reluctance Motor Drives Based On Simulink and Finite Element ModelenmnabilNo ratings yet
- SIMULATION MODEL of Permanent Magnet Synchronous MotorDocument9 pagesSIMULATION MODEL of Permanent Magnet Synchronous MotorSri MathiNo ratings yet
- Sensorless Vector Control of Induction Motor Using Direct Adaptive RNN Speed EstimatorDocument9 pagesSensorless Vector Control of Induction Motor Using Direct Adaptive RNN Speed Estimatormechernene_aek9037No ratings yet
- EEE 1206 011 Direct Quadrate Modeling Induction Motor MatLab Simulink PDFDocument7 pagesEEE 1206 011 Direct Quadrate Modeling Induction Motor MatLab Simulink PDFFiaz KhanNo ratings yet
- Reasch PaperDocument8 pagesReasch PaperRajveerNo ratings yet
- Efficiency Aspects of Vector Control Applied To Synchronous Reluctance MotorsDocument7 pagesEfficiency Aspects of Vector Control Applied To Synchronous Reluctance MotorsNeeraj GahlainNo ratings yet
- Simulation Modelling Practice and Theory: Abdallah Barakat, Slim Tnani, Gérard Champenois, Emile MouniDocument15 pagesSimulation Modelling Practice and Theory: Abdallah Barakat, Slim Tnani, Gérard Champenois, Emile Mounigurunathan14No ratings yet
- SIMULATION MODEL of Permanent Magnet Synchronous MotorDocument9 pagesSIMULATION MODEL of Permanent Magnet Synchronous MotorSri MathiNo ratings yet
- Robust Speed Sensorless Control of Doubly-Fed Induction Machine Based On Input-Output Feedback Linearization Control Using A Sliding-Mode ObserverDocument9 pagesRobust Speed Sensorless Control of Doubly-Fed Induction Machine Based On Input-Output Feedback Linearization Control Using A Sliding-Mode ObservernaserhashemniaNo ratings yet
- Simulation of Six Phase Permanent Magnet Synchronous Generator in MATLABDocument5 pagesSimulation of Six Phase Permanent Magnet Synchronous Generator in MATLABجمال ضيفيNo ratings yet
- AC Servo Motor-1Document6 pagesAC Servo Motor-1Tawhid Bin TarekNo ratings yet
- 2 Symposium On Lift and Escalator TechnologiesDocument12 pages2 Symposium On Lift and Escalator TechnologiesfreddyjoertyNo ratings yet
- Archive of SID: Performance Analysis of A Cost Effective 4-Switch 3-Phase Inverter Fed IM DriveDocument6 pagesArchive of SID: Performance Analysis of A Cost Effective 4-Switch 3-Phase Inverter Fed IM DrivePranav VyasNo ratings yet
- Park's Vector Approach For Online Fault Diagnosis of Induction MotorDocument7 pagesPark's Vector Approach For Online Fault Diagnosis of Induction Motoritcmiguel100% (1)
- Dynamic Modelling of Induction MotorDocument12 pagesDynamic Modelling of Induction Motorvidya_sagar826No ratings yet
- Arindam Seminar 11Document6 pagesArindam Seminar 11Arindam BhattacharjeeNo ratings yet
- Field Oriented Control of Ac Motor - ReportDocument9 pagesField Oriented Control of Ac Motor - ReportKesri Nath TiwariNo ratings yet
- Speed Control of DC MotorDocument5 pagesSpeed Control of DC MotorAmit SinghNo ratings yet
- Modeling and Simulation of Induction Generators in Wind Power Applications Using High-Order ModelsDocument15 pagesModeling and Simulation of Induction Generators in Wind Power Applications Using High-Order ModelsKVV100% (1)
- Modelling of A Large Synchronous Generator and Computation of The Auto Reclosing Timing of The Circuit Breaker For Its Transient StabilityDocument23 pagesModelling of A Large Synchronous Generator and Computation of The Auto Reclosing Timing of The Circuit Breaker For Its Transient StabilityAnonymous zzMfpoBxNo ratings yet
- Induction Motor Equivalent Circuit For Dynamic SimulationDocument6 pagesInduction Motor Equivalent Circuit For Dynamic Simulationmareymorsy2822No ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Condition Monitoring and Fault Diagnosis of Induction MotorDocument4 pagesCondition Monitoring and Fault Diagnosis of Induction MotorFelix RiestraNo ratings yet
- Simulation of First Benchmark Model For Analysis of Subsynchronous Resonance in Power Systems Using SequelDocument7 pagesSimulation of First Benchmark Model For Analysis of Subsynchronous Resonance in Power Systems Using SequelPabloNalogowskiNo ratings yet
- Modeling of Type 4 Wind Turbine Generators - UVIG Modeling WikiDocument11 pagesModeling of Type 4 Wind Turbine Generators - UVIG Modeling WikielchicogrisNo ratings yet
- Design of Direct Torque Controller of Induction Motor (DTC) : Alnasir, Z.A. Almarhoon A.HDocument17 pagesDesign of Direct Torque Controller of Induction Motor (DTC) : Alnasir, Z.A. Almarhoon A.HCòi HuyNo ratings yet
- Parameter Identification and Comparision of An Induction Motor ModelsDocument11 pagesParameter Identification and Comparision of An Induction Motor ModelsJUAN4201No ratings yet
- Critical Clearing Time of DFIGDocument7 pagesCritical Clearing Time of DFIGmv1970No ratings yet
- Cor ZineDocument9 pagesCor ZineStephen BridgesNo ratings yet
- 4Document5 pages4Alsmany ArdabNo ratings yet
- Simulation Model of Hydro Power Plant Using Matlab/SimulinkDocument8 pagesSimulation Model of Hydro Power Plant Using Matlab/Simulinkmanoj kumarNo ratings yet
- Direct Torque Control of Inverter Fed PMSM Drive Using SVMDocument7 pagesDirect Torque Control of Inverter Fed PMSM Drive Using SVMInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Of Induction Motor Using Artificial Neural Network and Implementation in MATLABDocument54 pagesOf Induction Motor Using Artificial Neural Network and Implementation in MATLABnareshreddy136100% (1)
- Modeling of Permanent Magnet Motor Drives: Ieee Transactions On Industrial Electronics, Vol. NO 4, NovemberDocument5 pagesModeling of Permanent Magnet Motor Drives: Ieee Transactions On Industrial Electronics, Vol. NO 4, NovemberMeena RamNo ratings yet
- IEEE PES 12plsdfa20mcmsamDocument7 pagesIEEE PES 12plsdfa20mcmsamParameswararao BillaNo ratings yet
- Indus Con 2004Document6 pagesIndus Con 2004tiojejaoNo ratings yet
- Simulation Model of Hydro Power Plant Using Matlab/Simulink: Mousa SattoufDocument7 pagesSimulation Model of Hydro Power Plant Using Matlab/Simulink: Mousa SattoufWoldemariam WorkuNo ratings yet
- (Journal of Electrical Engineering) A New High Speed Induction Motor Drive Based On Field Orientation and Hysteresis Current ComparisonDocument9 pages(Journal of Electrical Engineering) A New High Speed Induction Motor Drive Based On Field Orientation and Hysteresis Current ComparisonAugusto ThedoctorNo ratings yet
- CFD Analysis of A Twisted Savonius TurbineDocument4 pagesCFD Analysis of A Twisted Savonius TurbineRgcp RgcpNo ratings yet
- A New Approach Based On Sinusoidal PWM Inverter With PI Controller For Vector Control of Induction MotorDocument7 pagesA New Approach Based On Sinusoidal PWM Inverter With PI Controller For Vector Control of Induction MotortheijesNo ratings yet
- Fuzzy-Logic Control of Single-Phase Induction MotorDocument10 pagesFuzzy-Logic Control of Single-Phase Induction Motor123456mkNo ratings yet
- An Improved Efficiency of Fuzzy Sliding Mode Cont PDFDocument5 pagesAn Improved Efficiency of Fuzzy Sliding Mode Cont PDFNoureddine BounaslaNo ratings yet
- IJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchDocument5 pagesIJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchInternational Journal of computational Engineering research (IJCER)No ratings yet
- Synchronous Drive PerformanceDocument8 pagesSynchronous Drive PerformancehaimantiNo ratings yet
- Rees DfigDocument50 pagesRees DfigSoham KaryakarteNo ratings yet
- Direct Quadrate D-Q Modeling of 3-Phase PDFDocument7 pagesDirect Quadrate D-Q Modeling of 3-Phase PDFRuchir Pandey HSET, SRHUNo ratings yet
- DQ InductanceDocument11 pagesDQ Inductancegthulasi789193No ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Model Predictive Control of High Power Converters and Industrial DrivesFrom EverandModel Predictive Control of High Power Converters and Industrial DrivesNo ratings yet
- Electric Motor Control: DC, AC, and BLDC MotorsFrom EverandElectric Motor Control: DC, AC, and BLDC MotorsRating: 4.5 out of 5 stars4.5/5 (19)
- Electrical Engineering Forenoon SessionDocument29 pagesElectrical Engineering Forenoon SessionMallikarjunBhiradeNo ratings yet
- Electrical BE005 Key 2014 Revised PDFDocument5 pagesElectrical BE005 Key 2014 Revised PDFMallikarjunBhiradeNo ratings yet
- Transmission Corporation of Andhra Pradesh Limited Detailed NotificationDocument9 pagesTransmission Corporation of Andhra Pradesh Limited Detailed NotificationSRADHA SABOORINo ratings yet
- Isro Sample Paper June 2005Document10 pagesIsro Sample Paper June 2005Dayakar RanaNo ratings yet
- 6615 LowSecondHarmonic BK 20140210 WebDocument20 pages6615 LowSecondHarmonic BK 20140210 WebAlfredo ApNo ratings yet
- Insulation ClassDocument1 pageInsulation ClassKoti ReddyNo ratings yet
- 24dec Aee Q A PDFDocument19 pages24dec Aee Q A PDFGoutham DevisettyNo ratings yet
- List of Components Is To Be Purchased FinalDocument1 pageList of Components Is To Be Purchased FinalMallikarjunBhiradeNo ratings yet
- GATE EE Vol-2 Sample ChapterDocument35 pagesGATE EE Vol-2 Sample ChaptermanorathprasadNo ratings yet
- MCQ and NAT type exam result with section, key and marksDocument3 pagesMCQ and NAT type exam result with section, key and marksMallikarjunBhiradeNo ratings yet
- LT 8711Document38 pagesLT 8711MallikarjunBhiradeNo ratings yet
- Gateforum Electrical Engg 2012Document25 pagesGateforum Electrical Engg 2012MallikarjunBhiradeNo ratings yet
- Question and Answers Electrical MaintenaDocument68 pagesQuestion and Answers Electrical MaintenaMallikarjunBhiradeNo ratings yet
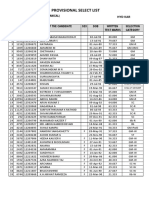
- Karnataka Power Corp Factory Medical Officer Selection ListDocument1 pageKarnataka Power Corp Factory Medical Officer Selection ListMallikarjunBhiradeNo ratings yet
- Electrical Maintenance FAQsDocument416 pagesElectrical Maintenance FAQsVivek PainkraNo ratings yet
- Basic Circuits & Network LawsDocument16 pagesBasic Circuits & Network LawsMallikarjunBhiradeNo ratings yet
- Isro Set - C 2018Document20 pagesIsro Set - C 2018MallikarjunBhiradeNo ratings yet
- Ee1301 Power ElectronicsDocument15 pagesEe1301 Power ElectronicsskumaraneeeNo ratings yet
- Classification of Magnetic Materials TypesDocument4 pagesClassification of Magnetic Materials TypesTsubasa GarcíaNo ratings yet
- Isro 2017 Ee KeyDocument4 pagesIsro 2017 Ee KeyMallikarjunBhiradeNo ratings yet
- Electrical Machines PDFDocument54 pagesElectrical Machines PDFMallikarjunBhirade100% (1)
- Paper 3-A New Algorithm For Data Compression OptimizationDocument4 pagesPaper 3-A New Algorithm For Data Compression OptimizationEditor IJACSANo ratings yet
- Op AmpDocument28 pagesOp AmpBright BreezeNo ratings yet
- Delta-Star Transformer Connection Overview - EEPDocument4 pagesDelta-Star Transformer Connection Overview - EEPJhonci Cori100% (1)
- Application FormDocument1 pageApplication FormMallikarjunBhiradeNo ratings yet
- AE Mechanical PDFDocument2 pagesAE Mechanical PDFMallikarjunBhiradeNo ratings yet
- SI and CGS Units: Thomas HeinzelDocument2 pagesSI and CGS Units: Thomas HeinzelMallikarjunBhiradeNo ratings yet
- Website: WWW - Nptibangalore.in: Mon Tue Wed Thu Fri Mon Tue Wed Thu FriDocument8 pagesWebsite: WWW - Nptibangalore.in: Mon Tue Wed Thu Fri Mon Tue Wed Thu FriMallikarjunBhiradeNo ratings yet
- Final Answer Key for Assistant Engineer Electrical ExamDocument1 pageFinal Answer Key for Assistant Engineer Electrical ExamMallikarjunBhiradeNo ratings yet
- Adv 01 English Final 2Document3 pagesAdv 01 English Final 2Vemunori AravindNo ratings yet
- Charles HeinéDocument1 pageCharles HeinéWikibaseNo ratings yet
- Instruction Manual PC Interface RSM 100: TOSHIBA Corporation 1999 All Rights ReservedDocument173 pagesInstruction Manual PC Interface RSM 100: TOSHIBA Corporation 1999 All Rights ReservedHuy Truong GiaNo ratings yet
- Multi-Parameter Patient MonitorDocument6 pagesMulti-Parameter Patient Monitor杨敏杰No ratings yet
- Introducing REALM™: A First-of-Its-Kind MLS System Interface Giving You Everything at Your FingertipsDocument3 pagesIntroducing REALM™: A First-of-Its-Kind MLS System Interface Giving You Everything at Your FingertipsLohrasp SuraliwalaNo ratings yet
- How To Create Partner Functions in SAP Easily in @SAP S/4HANA by @KPCDocument27 pagesHow To Create Partner Functions in SAP Easily in @SAP S/4HANA by @KPCKakarla ChanduNo ratings yet
- Obiero Cover LetterDocument3 pagesObiero Cover Letterobieroedwin6645No ratings yet
- Server Controls and Events: IT 4203 Advanced Web DevelopmentDocument25 pagesServer Controls and Events: IT 4203 Advanced Web DevelopmentBindu Devender MahajanNo ratings yet
- Generation of Computers: Camarines Sur National High School Icf 7 Learning Activity Sheet Quarter 1, Week 4Document9 pagesGeneration of Computers: Camarines Sur National High School Icf 7 Learning Activity Sheet Quarter 1, Week 4Houstine ErisareNo ratings yet
- Email Etiquette RulesDocument3 pagesEmail Etiquette RuleseutiuhiaNo ratings yet
- LEICADocument4 pagesLEICAConstantinNo ratings yet
- HTTP and FTPDocument2 pagesHTTP and FTPbhaskarsw86No ratings yet
- Sublime TextDocument55 pagesSublime TextAnonymous tMfxW4100% (1)
- HUAWEI SMC2.0 Lab GuideDocument92 pagesHUAWEI SMC2.0 Lab Guidebaccari taoufikNo ratings yet
- Big List of Naughty StringsDocument15 pagesBig List of Naughty StringsR. Tyler CroyNo ratings yet
- 20487B ENU TrainerHandbookDocument688 pages20487B ENU TrainerHandbookElsa Gonçalves100% (1)
- MessageDocument4 pagesMessageJoão LucasNo ratings yet
- Unlimited Adventures - Reference CardDocument4 pagesUnlimited Adventures - Reference CardJorge Martínez RomeraNo ratings yet
- Project Report (CS499) - Albert MairaDocument68 pagesProject Report (CS499) - Albert MairakingungeNo ratings yet
- Apache MahoutDocument22 pagesApache MahoutAmol JagtapNo ratings yet
- Master Test PlanDocument15 pagesMaster Test PlanALVARO NICOLAS ZEVALLOS RIOSNo ratings yet
- InBio SeriesDocument3 pagesInBio SeriesA S KHAMSAHNo ratings yet
- DX3224H (DX3224HV) Multi-Channel Encoder Spec 2019.6.27Document3 pagesDX3224H (DX3224HV) Multi-Channel Encoder Spec 2019.6.27Ahmad MuzayyinNo ratings yet
- Simulate ONTAP 8.2 Step-by-Step Installation (Nau-Final) PDFDocument53 pagesSimulate ONTAP 8.2 Step-by-Step Installation (Nau-Final) PDFKishore ChowdaryNo ratings yet
- Hicalc ManualDocument46 pagesHicalc ManualYasir ShigileeniNo ratings yet
- BadStore Net v2 1 Manual PDFDocument23 pagesBadStore Net v2 1 Manual PDFGuillermo AndradeNo ratings yet
- Week10-11-Access Control Models-PoliciesDocument33 pagesWeek10-11-Access Control Models-Policiesmahtab mahtabNo ratings yet
- DD-WRT On WA860RE V1Document10 pagesDD-WRT On WA860RE V1Ferdiand RahmadyaNo ratings yet
- UiPath Robotic Process Automation ProjectsDocument380 pagesUiPath Robotic Process Automation ProjectsBaloo100% (1)
- Toeic Answer SheetDocument2 pagesToeic Answer SheetThu Trang DinhNo ratings yet
- Lesson 1 - Uncovering The Mystery of ComputersDocument5 pagesLesson 1 - Uncovering The Mystery of ComputersImie Omamalin GuisehanNo ratings yet