You might also like
- Microprocessor Programming and Applications for Scientists and EngineersFrom EverandMicroprocessor Programming and Applications for Scientists and EngineersNo ratings yet
- CC320Document100 pagesCC320NguyễnĐạtNo ratings yet
- STM32F446-ARM Nucleo Board User's Manual: D.K. Blandford August, 2017 Updated November 3, 2017Document60 pagesSTM32F446-ARM Nucleo Board User's Manual: D.K. Blandford August, 2017 Updated November 3, 2017Anil SuhaNo ratings yet
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionFrom EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionNo ratings yet
- Tutorial Can PicDocument24 pagesTutorial Can Picjass1304100% (1)
- Ili9806e V097 PDFDocument328 pagesIli9806e V097 PDFRené ŠirokýNo ratings yet
- Vacon NXL Local Remote Control ALFIFF27 ApplicatioDocument52 pagesVacon NXL Local Remote Control ALFIFF27 ApplicatioTanuTiganuNo ratings yet
- Embedded Programming Textbook PDFDocument266 pagesEmbedded Programming Textbook PDFVport PortNo ratings yet
- Prime - POCT1 Interface Protocol V2 0 Dec13Document14 pagesPrime - POCT1 Interface Protocol V2 0 Dec13Gabriel ZanutoNo ratings yet
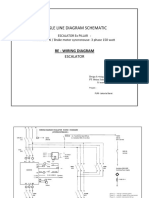
- Binder Wiring Puri Ex Pillar RewiringDocument10 pagesBinder Wiring Puri Ex Pillar RewiringWiratama MudaNo ratings yet
- HB UCM 2018-10 enDocument44 pagesHB UCM 2018-10 enNaeem HussainNo ratings yet
- A1000 Spindle OrientationDocument36 pagesA1000 Spindle OrientationcoronaqcNo ratings yet
- Atollic Develop Debug BootloaderApps ARMCortex PDFDocument29 pagesAtollic Develop Debug BootloaderApps ARMCortex PDFValeriy TelpisNo ratings yet
- STM32 SPI Flash MemDocument19 pagesSTM32 SPI Flash MemimioNo ratings yet
- Emerson TD3200 ManualDocument107 pagesEmerson TD3200 ManualEri Wanto SihombingNo ratings yet
- N300p ManualDocument155 pagesN300p Manualشركة مصاعد الزيدي Alzaedy elevators co.No ratings yet
- Regenerative DrivesDocument45 pagesRegenerative Drivestreeoflifeprog100% (1)
- Vacon NX Inverter Manual FI9 FI14Document101 pagesVacon NX Inverter Manual FI9 FI14Gilberto PootNo ratings yet
- Vacon NXL Multi Control Application Manual DPD0144Document63 pagesVacon NXL Multi Control Application Manual DPD0144TanuTiganu100% (1)
- DC Panel OperationDocument30 pagesDC Panel Operationnguyễn hùngNo ratings yet
- WEG Cfw11 Programming Manual 0899.5620 3.1x Manual EnglishDocument298 pagesWEG Cfw11 Programming Manual 0899.5620 3.1x Manual EnglishRynoJoubertNo ratings yet
- PC 90 OEM Motor Control Board ManualDocument12 pagesPC 90 OEM Motor Control Board Manualzineb100% (2)
- Vincotech Power Modules CatalogDocument134 pagesVincotech Power Modules CataloglizxcanoNo ratings yet
- DCLT 010 User ManualDocument48 pagesDCLT 010 User ManualBhuvanesh ChandrasekaranNo ratings yet
- Fddwin32 Manual enDocument56 pagesFddwin32 Manual enmcarthurmaccNo ratings yet
- 3654Document16 pages3654Carlos MusellaNo ratings yet
- Olimexino STM32Document19 pagesOlimexino STM32numero909No ratings yet
- Crane AC Drive Technical ManualDocument71 pagesCrane AC Drive Technical ManualKavinda GehanNo ratings yet
- S7-300 - Module SpecificationsDocument588 pagesS7-300 - Module SpecificationsTetsusaiga100% (1)
- Frequency Changer Error GuideDocument3 pagesFrequency Changer Error Guidethanggimme.phanNo ratings yet
- XC709D XC809D-EnglishDocument143 pagesXC709D XC809D-EnglishDian Rusdiana100% (1)
- Driver L7 OMRON PDFDocument299 pagesDriver L7 OMRON PDFmuaadhNo ratings yet
- Unico Non PVFDocument30 pagesUnico Non PVFReynold SuarezNo ratings yet
- Carmine Noviello-Mastering STM32-Leanpub (2016)Document783 pagesCarmine Noviello-Mastering STM32-Leanpub (2016)Dũng TrầnNo ratings yet
- SCM Go Flex: Product Technical SheetDocument8 pagesSCM Go Flex: Product Technical SheetKen LeeNo ratings yet
- Power Meter ME96NSR Modbus Type Instruction ManualDocument0 pagesPower Meter ME96NSR Modbus Type Instruction ManualAndrew MaverickNo ratings yet
- LXM23D and BCH Servo Drive System Product ManualDocument403 pagesLXM23D and BCH Servo Drive System Product ManualLau Yuk LunNo ratings yet
- Vacon NX IO Boards User Manual DPD00884A UK PDFDocument84 pagesVacon NX IO Boards User Manual DPD00884A UK PDFMin Jiang100% (1)
- Vacon NXL - The - Easy - and - Impressive - AC - DriveDocument21 pagesVacon NXL - The - Easy - and - Impressive - AC - Driveaslam77zNo ratings yet
- Namiki Precision Jewel Co. product catalogDocument68 pagesNamiki Precision Jewel Co. product catalogWilliam RoaNo ratings yet
- Designing of External Loader On QSPIDocument35 pagesDesigning of External Loader On QSPIealanlNo ratings yet
- Omron Cable nt2sDocument212 pagesOmron Cable nt2sFoued HallebNo ratings yet
- wp-2011: The Basics of How An Encoder Works: White PaperDocument2 pageswp-2011: The Basics of How An Encoder Works: White PaperAnghelo AlcaldeNo ratings yet
- Mikrobasic ManualDocument348 pagesMikrobasic ManualLucho AngelNo ratings yet
- Manual LMCSSDocument311 pagesManual LMCSSenriqueNo ratings yet
- 15 PC Boards WDocument144 pages15 PC Boards WMAYESTONNo ratings yet
- Fatek FBS SeriesDocument71 pagesFatek FBS SeriesMuzammal BaigNo ratings yet
- Guide Datasheet NECDocument226 pagesGuide Datasheet NECvincentpessemesse0% (1)
- Surface Go Fact SheetDocument4 pagesSurface Go Fact SheetagustianNo ratings yet
- AU6860B Datasheet v01Document14 pagesAU6860B Datasheet v01david29xNo ratings yet
- KEB v3 - 21 Rev1A 08 - 2014 PDFDocument314 pagesKEB v3 - 21 Rev1A 08 - 2014 PDFDaniel GonzalezNo ratings yet
- Eng - Ademco Accord XPCDocument62 pagesEng - Ademco Accord XPCAdam ChalklyNo ratings yet
- V01 Genesis Hardware Manual-1Document46 pagesV01 Genesis Hardware Manual-1emartemm1503No ratings yet
- Vacon NXC User Manual DPD00890B UKDocument112 pagesVacon NXC User Manual DPD00890B UKirfanWPKNo ratings yet
- Contents - Get Started With The SensorTile - BoxDocument5 pagesContents - Get Started With The SensorTile - BoxaaaaNo ratings yet
- PL7 Pro v4.4 P1 - Info DokumentDocument2 pagesPL7 Pro v4.4 P1 - Info DokumentAngel MontellanoNo ratings yet
- DAC STM Application NoteDocument19 pagesDAC STM Application NoteLaura JimenezNo ratings yet
- Telemecanique CatalogDocument75 pagesTelemecanique Catalogchidambaram kasiNo ratings yet
- 450 1 KoDocument14 pages450 1 KoJavier VasquezNo ratings yet
- Volnei A. Pedroni Finite State Machines in Hardware Theory and Design PDFDocument349 pagesVolnei A. Pedroni Finite State Machines in Hardware Theory and Design PDFjcfermosellNo ratings yet
- Bash Notes For ProfessionalsDocument204 pagesBash Notes For ProfessionalsRichard Armando100% (1)
- Embedded Programming Textbook PDFDocument266 pagesEmbedded Programming Textbook PDFVport PortNo ratings yet
- Conv DSP TutorialDocument15 pagesConv DSP TutorialVport PortNo ratings yet
- UDP Control and Monitoring With PIC Microcontroller - StudentCompanion PDFDocument14 pagesUDP Control and Monitoring With PIC Microcontroller - StudentCompanion PDFVport PortNo ratings yet
- Digital Signal Processing 2014Document151 pagesDigital Signal Processing 2014Vport PortNo ratings yet
- Mixed Signal Embedded ProgrammingDocument268 pagesMixed Signal Embedded ProgrammingPavan Kumar100% (14)
- How To Make Arduino and Processing IDE Communicate - Arduino - Maker ProDocument16 pagesHow To Make Arduino and Processing IDE Communicate - Arduino - Maker ProVport PortNo ratings yet
- UDP Control and Monitoring With PIC Microcontroller - StudentCompanion PDFDocument14 pagesUDP Control and Monitoring With PIC Microcontroller - StudentCompanion PDFVport PortNo ratings yet
- Mis STD 1553 Packet FormatDocument41 pagesMis STD 1553 Packet Formatiwc2008007No ratings yet
- (Ebook - PDF) Kick Ass Delphi ProgrammingDocument493 pages(Ebook - PDF) Kick Ass Delphi Programmingnflorin_adrianNo ratings yet
- Shifrin L. Mathematica Programming.. An Advanced Introduction (Draft, 2008) (408s) - SCDocument408 pagesShifrin L. Mathematica Programming.. An Advanced Introduction (Draft, 2008) (408s) - SCVport PortNo ratings yet
- Digital Signal Processing First TermDocument48 pagesDigital Signal Processing First TermVport PortNo ratings yet
- FFT BookDocument209 pagesFFT BookVport Port100% (2)
- All-in-One Data Acquisition Solution on a ChipDocument34 pagesAll-in-One Data Acquisition Solution on a ChipVport PortNo ratings yet
- QuickUSB User Guide v2.11.41Document75 pagesQuickUSB User Guide v2.11.41Vport Port100% (1)
- stm32f0 Hands On PDFDocument91 pagesstm32f0 Hands On PDFVport PortNo ratings yet
- EFY Special Isuue Microcontroller Based Project PDFDocument88 pagesEFY Special Isuue Microcontroller Based Project PDFVport Port100% (4)
- STM32F3xx Training V1 - 2x PDFDocument602 pagesSTM32F3xx Training V1 - 2x PDFVport Port100% (1)
- TCP IP 2006 Corp SeminarDocument187 pagesTCP IP 2006 Corp SeminarVport PortNo ratings yet
- Advanced Visual Basic 6 Techniques - WileyDocument520 pagesAdvanced Visual Basic 6 Techniques - WileyEugen1968100% (1)
- MCU8 University Conference Oct - 2012 PDFDocument34 pagesMCU8 University Conference Oct - 2012 PDFVport Port100% (1)
- Embedded Systems Design With The Atmel AVR Microcontroller Part II PDFDocument176 pagesEmbedded Systems Design With The Atmel AVR Microcontroller Part II PDFMbako Buck Goitsemang100% (2)
- VHDL Beginners BookDocument201 pagesVHDL Beginners Bookapi-3731978100% (7)
- Mukholi F. T. MbaDocument98 pagesMukholi F. T. MbaVport PortNo ratings yet
- PIC32 TrainingDocument96 pagesPIC32 TrainingPalmDINO100% (4)
- Spartan3E Tutorial 3Document162 pagesSpartan3E Tutorial 3abedoubariNo ratings yet
- uC-GUI User4.04Document855 pagesuC-GUI User4.04Vport PortNo ratings yet
- CodeVisionAVR2.05.3 1Document502 pagesCodeVisionAVR2.05.3 1Efrad Eka NugrahaNo ratings yet
- Cisco Intelligent WAN (IWAN) - 1Document15 pagesCisco Intelligent WAN (IWAN) - 1Priscila FloresNo ratings yet
- Wifi Integration Into Mobile Broadband Toni Tjarhandy Cisco SystemsDocument40 pagesWifi Integration Into Mobile Broadband Toni Tjarhandy Cisco SystemsFAVE ONENo ratings yet
- FTTBC+HGW (GPON Networking, HGW Providing The VoIP Service) Configuration GuideDocument84 pagesFTTBC+HGW (GPON Networking, HGW Providing The VoIP Service) Configuration GuideZMaxNo ratings yet
- Signaling System 7Document70 pagesSignaling System 7vineetchachra100% (1)
- JhulDocument5 pagesJhul037 Muhammad SupriyadiNo ratings yet
- Bluetooth Technology Seminar Report by Vidhu Sharma (18130165) BCA-6th SemDocument27 pagesBluetooth Technology Seminar Report by Vidhu Sharma (18130165) BCA-6th Semaskariyaz786No ratings yet
- (WR Net 018 CC) Manual For DHCPDocument8 pages(WR Net 018 CC) Manual For DHCPKhyle Laurenz DuroNo ratings yet
- Understand and Troubleshoot IP Address Management (IPAM) in Windows Server 8 BetaDocument102 pagesUnderstand and Troubleshoot IP Address Management (IPAM) in Windows Server 8 Betacalin bNo ratings yet
- P.Kalyanasundaram: ObjectiveDocument3 pagesP.Kalyanasundaram: ObjectiveMayank GoyalNo ratings yet
- SSL Handshake AnalysisDocument10 pagesSSL Handshake Analysisjosh 007No ratings yet
- Ti SIP 3665 3.6 PDFDocument18 pagesTi SIP 3665 3.6 PDFshethNo ratings yet
- SJ-20121008091953-002-ZXHN H298N (V1.1) Home Gateway Maintenance Manual (2FX 1USB) PDFDocument133 pagesSJ-20121008091953-002-ZXHN H298N (V1.1) Home Gateway Maintenance Manual (2FX 1USB) PDFRoxana PetrescuNo ratings yet
- Nguyen Tien Dat - HDCPDocument6 pagesNguyen Tien Dat - HDCPĐạt NguyễnNo ratings yet
- Service Providers Solution: Compatible MatrixDocument54 pagesService Providers Solution: Compatible Matrixkadi0209No ratings yet
- Demystifying Cisco ACI For HP Servers With OneView, Virtual Connect and B22 ModulesDocument30 pagesDemystifying Cisco ACI For HP Servers With OneView, Virtual Connect and B22 ModulesinsanejokajamsNo ratings yet
- Virtual Chassis MX SeriesDocument230 pagesVirtual Chassis MX SeriesJosé Pablo MongeNo ratings yet
- Prosafe VPN Firewall Fvs318V3 Reference Manual: 350 East Plumeria Drive San Jose, Ca 95134 UsaDocument184 pagesProsafe VPN Firewall Fvs318V3 Reference Manual: 350 East Plumeria Drive San Jose, Ca 95134 UsahernanNo ratings yet
- CapsuleVPNClient AdminGuideDocument32 pagesCapsuleVPNClient AdminGuideEdisoncsiNo ratings yet
- CST303 Computer Networks, December 2021Document3 pagesCST303 Computer Networks, December 2021Anas AnsarNo ratings yet
- CCNASv2 InstructorPPT CH2Document85 pagesCCNASv2 InstructorPPT CH2DiegoMenesesNo ratings yet
- Chaitanya Godavari Grameena Bank: Head Office::: GunturDocument3 pagesChaitanya Godavari Grameena Bank: Head Office::: GunturAndy_sumanNo ratings yet
- Chapter 4 Lab 4-3, Redistribution Between Eigrp For Ipv6 and Ospfv3 TopologyDocument11 pagesChapter 4 Lab 4-3, Redistribution Between Eigrp For Ipv6 and Ospfv3 TopologyHarrison HayesNo ratings yet
- Ip Sub NettingDocument6 pagesIp Sub Nettingrobiatul AdwNo ratings yet
- VoIP Interconnect FormDocument2 pagesVoIP Interconnect FormFortune MyamboNo ratings yet
- Martin Casado's PHD Thesis at Stanford University On SDN and Network VirtualizationDocument111 pagesMartin Casado's PHD Thesis at Stanford University On SDN and Network VirtualizationbillmichNo ratings yet
- Malc XP Release NotesDocument16 pagesMalc XP Release NotesSteffi DinopolNo ratings yet
- How To Install The Microsoft Loopback Adapter in Windows XPDocument3 pagesHow To Install The Microsoft Loopback Adapter in Windows XPsumanth_0678No ratings yet
- NetworkPro QoS guide covers bandwidth controlDocument9 pagesNetworkPro QoS guide covers bandwidth controlkoulis123No ratings yet
- 3GPP TS 29.272: Technical SpecificationDocument78 pages3GPP TS 29.272: Technical SpecificationJordan RashevNo ratings yet
- FFRTC Log BakDocument2,801 pagesFFRTC Log BakTaynnan Fontana dos SantosNo ratings yet
- Linux: The Ultimate Beginner's Guide to Learn Linux Operating System, Command Line and Linux Programming Step by StepFrom EverandLinux: The Ultimate Beginner's Guide to Learn Linux Operating System, Command Line and Linux Programming Step by StepRating: 4.5 out of 5 stars4.5/5 (9)
- Mastering Linux Security and Hardening - Second Edition: Protect your Linux systems from intruders, malware attacks, and other cyber threats, 2nd EditionFrom EverandMastering Linux Security and Hardening - Second Edition: Protect your Linux systems from intruders, malware attacks, and other cyber threats, 2nd EditionNo ratings yet
- The Linux Command Line Beginner's GuideFrom EverandThe Linux Command Line Beginner's GuideRating: 4.5 out of 5 stars4.5/5 (23)
- Azure DevOps Engineer: Exam AZ-400: Azure DevOps Engineer: Exam AZ-400 Designing and Implementing Microsoft DevOps SolutionsFrom EverandAzure DevOps Engineer: Exam AZ-400: Azure DevOps Engineer: Exam AZ-400 Designing and Implementing Microsoft DevOps SolutionsNo ratings yet
- The Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireFrom EverandThe Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireNo ratings yet
- Make Your PC Stable and Fast: What Microsoft Forgot to Tell YouFrom EverandMake Your PC Stable and Fast: What Microsoft Forgot to Tell YouRating: 4 out of 5 stars4/5 (1)
- Powershell: The ultimate beginner's guide to Powershell, making you a master at Windows Powershell command line fast!From EverandPowershell: The ultimate beginner's guide to Powershell, making you a master at Windows Powershell command line fast!Rating: 5 out of 5 stars5/5 (1)
- Kali Linux - An Ethical Hacker's Cookbook - Second Edition: Practical recipes that combine strategies, attacks, and tools for advanced penetration testing, 2nd EditionFrom EverandKali Linux - An Ethical Hacker's Cookbook - Second Edition: Practical recipes that combine strategies, attacks, and tools for advanced penetration testing, 2nd EditionRating: 5 out of 5 stars5/5 (1)
- Hackers & Painters: Big Ideas from the Computer AgeFrom EverandHackers & Painters: Big Ideas from the Computer AgeRating: 4.5 out of 5 stars4.5/5 (5)
- Apple Card and Apple Pay: A Ridiculously Simple Guide to Mobile PaymentsFrom EverandApple Card and Apple Pay: A Ridiculously Simple Guide to Mobile PaymentsNo ratings yet
- Hacking Essentials - The Beginner's Guide To Ethical Hacking And Penetration TestingFrom EverandHacking Essentials - The Beginner's Guide To Ethical Hacking And Penetration TestingRating: 3 out of 5 stars3/5 (1)
- RHCSA Red Hat Enterprise Linux 8: Training and Exam Preparation Guide (EX200), First EditionFrom EverandRHCSA Red Hat Enterprise Linux 8: Training and Exam Preparation Guide (EX200), First EditionRating: 3.5 out of 5 stars3.5/5 (2)
- Ubuntu Linux Toolbox: 1000+ Commands for Power UsersFrom EverandUbuntu Linux Toolbox: 1000+ Commands for Power UsersRating: 4 out of 5 stars4/5 (1)
- CompTIA Linux+/LPIC-1: Training and Exam Preparation Guide (Exam Codes: LX0-103/101-400 and LX0-104/102-400)From EverandCompTIA Linux+/LPIC-1: Training and Exam Preparation Guide (Exam Codes: LX0-103/101-400 and LX0-104/102-400)No ratings yet
- Mastering Swift 5 - Fifth Edition: Deep dive into the latest edition of the Swift programming language, 5th EditionFrom EverandMastering Swift 5 - Fifth Edition: Deep dive into the latest edition of the Swift programming language, 5th EditionNo ratings yet
- COBOL Basic Training Using VSAM, IMS and DB2From EverandCOBOL Basic Training Using VSAM, IMS and DB2Rating: 5 out of 5 stars5/5 (2)
- XDA Developers' Android Hacker's Toolkit: The Complete Guide to Rooting, ROMs and ThemingFrom EverandXDA Developers' Android Hacker's Toolkit: The Complete Guide to Rooting, ROMs and ThemingRating: 2 out of 5 stars2/5 (2)
- AWS: The Complete Beginner to Advanced Guide for Amazon Web Service — The Ultimate TutorialFrom EverandAWS: The Complete Beginner to Advanced Guide for Amazon Web Service — The Ultimate TutorialRating: 5 out of 5 stars5/5 (4)
- The No Bull$#!£ Guide to Building Your Own PC: No Bull GuidesFrom EverandThe No Bull$#!£ Guide to Building Your Own PC: No Bull GuidesNo ratings yet