You might also like
- Forces and EquilibriumDocument57 pagesForces and EquilibriumUnknown_unknown_unknownNo ratings yet
- CVE 253 Course OutlineDocument53 pagesCVE 253 Course OutlineSamuelShinaAyodeleNo ratings yet
- OSODocument124 pagesOSOLuis LayosaNo ratings yet
- Unit-III Elements of Civil Engineering and Engineering MechanicsDocument21 pagesUnit-III Elements of Civil Engineering and Engineering MechanicsshashikantscribdNo ratings yet
- Chapter 2 Worked Examples Force SystemsDocument17 pagesChapter 2 Worked Examples Force Systemsnvnrev100% (1)
- Engg Mechanics Ques BankDocument68 pagesEngg Mechanics Ques BankUtkalNo ratings yet
- Chapter 2 Forces and EquilibriumDocument53 pagesChapter 2 Forces and EquilibriumvinoNo ratings yet
- Chapter 3Document32 pagesChapter 3Anusha ManiNo ratings yet
- Equillibrium of Coplanar Concurrent ForcesDocument17 pagesEquillibrium of Coplanar Concurrent Forcessalman husainNo ratings yet
- Moment and Couples ExplainedDocument66 pagesMoment and Couples ExplainedUnknown_unknown_unknownNo ratings yet
- Engineering Mechanics by S K MondalDocument37 pagesEngineering Mechanics by S K MondalSambasivarao PerumallaNo ratings yet
- Solution of Engineering Mechanics For UCER Students 1995976039Document18 pagesSolution of Engineering Mechanics For UCER Students 1995976039Gulshan KumarNo ratings yet
- ENS 161 - Lecture 4Document26 pagesENS 161 - Lecture 4NAJEB PENDIAMANNo ratings yet
- Motion of Bodies Under The Action of ForceDocument15 pagesMotion of Bodies Under The Action of Forcejp gutierrezNo ratings yet
- Assignment No. 1 Resultant of Coplanar ForcesDocument12 pagesAssignment No. 1 Resultant of Coplanar ForcesIyes FreefallNo ratings yet
- Theory 1Document191 pagesTheory 1Joseph Arben Agus100% (1)
- Homework Solutions For Chapter 11: W W T T F T T W W TDocument4 pagesHomework Solutions For Chapter 11: W W T T F T T W W TkimseonhoNo ratings yet
- 114 119Document9 pages114 119Carlos Moran CepedaNo ratings yet
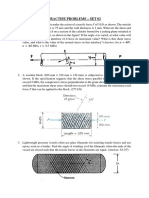
- Practise Problems Set02Document5 pagesPractise Problems Set02rohit kumarNo ratings yet
- Engg Mech Chapter 3Document24 pagesEngg Mech Chapter 3Mark John OgagNo ratings yet
- Statics of Particles.Document24 pagesStatics of Particles.Nagendran NatarajanNo ratings yet
- Coplanar Non Concurrent Force SystemsDocument23 pagesCoplanar Non Concurrent Force SystemsLester MarquezNo ratings yet
- Equilibrium Equations and Free-Body DiagramsDocument15 pagesEquilibrium Equations and Free-Body DiagramsAndy BayuNo ratings yet
- Engineering Mechanics (17CA03302) : Lecture NotesDocument74 pagesEngineering Mechanics (17CA03302) : Lecture NotesBADINEHALSANDEEPNo ratings yet
- 07 Es202Document19 pages07 Es202Moguri OwowNo ratings yet
- Assignment 05 AE670Document3 pagesAssignment 05 AE670Shubhi GangwarNo ratings yet
- CHAPTER 3 Resultants of Coplanar Force SystemsDocument57 pagesCHAPTER 3 Resultants of Coplanar Force SystemsDavid Murphy100% (2)
- Week - 6Document5 pagesWeek - 6Sudhakar UppalapatiNo ratings yet
- Mekanika Teknik PDFDocument141 pagesMekanika Teknik PDFAnonymous dSFbLxc9No ratings yet
- Type I: Examples Based On Components in SpaceDocument13 pagesType I: Examples Based On Components in SpaceAmeya1823100% (1)
- Mechanics MCQDocument7 pagesMechanics MCQShubhamNo ratings yet
- 02-Resultant-ForceDocument12 pages02-Resultant-ForceCiarrabell AguilarNo ratings yet
- Lecture 22Document62 pagesLecture 22adilafzalkhan4264No ratings yet
- Review Chapter 4-5Document29 pagesReview Chapter 4-5fannyparamitaNo ratings yet
- BIT MESRA RANCHI DEPARTMENT OF APPLIED MECHANICS ENGINEERING MECHANICS SHEET 1Document34 pagesBIT MESRA RANCHI DEPARTMENT OF APPLIED MECHANICS ENGINEERING MECHANICS SHEET 1monumunduriNo ratings yet
- ES 216 - Components and Resultants in StaticsDocument7 pagesES 216 - Components and Resultants in StaticsJommarVocalTagalogNo ratings yet
- Statics-Chapter-4Document11 pagesStatics-Chapter-4aniceto labianNo ratings yet
- ME111 1.1 The Mechanical Design Process: 9/27/00 ME111 Lecture 1 1 9/27/00 ME111 Lecture 1 2Document9 pagesME111 1.1 The Mechanical Design Process: 9/27/00 ME111 Lecture 1 1 9/27/00 ME111 Lecture 1 2Adam NortonNo ratings yet
- Tugas PS 2 Moment FullDocument22 pagesTugas PS 2 Moment Fullnuhman100% (4)
- Forces Module 1 SummaryDocument21 pagesForces Module 1 SummaryPrasaad Slv100% (1)
- Module 2 (1) MECH 101Document9 pagesModule 2 (1) MECH 101PJ MaskNo ratings yet
- Topic2 FatigueDocument36 pagesTopic2 Fatigue777894292No ratings yet
- Coplanar & Non Coplanar Force Systems PDFDocument23 pagesCoplanar & Non Coplanar Force Systems PDFMohammed Sumer50% (2)
- Be - First Year Engineering - Semester 1 - 2016 - December - Applied Chemistry I CbcgsDocument45 pagesBe - First Year Engineering - Semester 1 - 2016 - December - Applied Chemistry I CbcgsKenneth C.LinojNo ratings yet
- Analysis of TrussDocument22 pagesAnalysis of TrussSalem AlbarkiNo ratings yet
- 6Document15 pages6sanand_1992No ratings yet
- Resultant of ForceDocument27 pagesResultant of ForceAura Paige Montecastro-RevillaNo ratings yet
- Force VectorDocument47 pagesForce Vectoradeliene 25No ratings yet
- Nov-Dec - 2014Document20 pagesNov-Dec - 2014rkumaravelan4137100% (1)
- Equivalent Forces - DynamicsDocument67 pagesEquivalent Forces - DynamicsAshraf AdamNo ratings yet
- CHAP TWO Worked Example Engineering Mecha-IDocument12 pagesCHAP TWO Worked Example Engineering Mecha-InvnrevNo ratings yet
- Equilibrium of A Particle Equilibrium of A ParticleDocument4 pagesEquilibrium of A Particle Equilibrium of A ParticleAloysius AlipioNo ratings yet
- Problems in Quantum Mechanics: Third EditionFrom EverandProblems in Quantum Mechanics: Third EditionRating: 3 out of 5 stars3/5 (2)
- Mr. Joel B. Torres Jr. Mrs. Remedios Florendo Field Service Supervisor Station ManagerDocument2 pagesMr. Joel B. Torres Jr. Mrs. Remedios Florendo Field Service Supervisor Station ManagerMie ShellNo ratings yet
- UST-Geas Mechanics1Document10 pagesUST-Geas Mechanics1TayntaynNo ratings yet
- Physics For Beginners - PDF (Copy)Document162 pagesPhysics For Beginners - PDF (Copy)Mie Shell67% (3)
- Data Sheet: High-Speed DiodesDocument9 pagesData Sheet: High-Speed DiodesMie ShellNo ratings yet
- Read MeDocument2 pagesRead MeMie ShellNo ratings yet
- Manual Sony Vegas Pro 13Document692 pagesManual Sony Vegas Pro 13Carlos Alberto GarciaNo ratings yet
- LC CircuitsDocument3 pagesLC CircuitsAmarnath M DamodaranNo ratings yet
- Intro and Basic Concepts-ThermDocument12 pagesIntro and Basic Concepts-ThermMie Shell100% (1)
- 1N4448Document7 pages1N4448Bakhtiar TiarNo ratings yet
- Tie BreakerDocument13 pagesTie BreakerMie ShellNo ratings yet
- Who Wants To Be A Filipino?Document2 pagesWho Wants To Be A Filipino?Mie ShellNo ratings yet
- When Right Time ComesDocument3 pagesWhen Right Time ComesMie ShellNo ratings yet
- Trigo No MetriDocument2 pagesTrigo No MetriihsansepalmaNo ratings yet
- TUP-M EST (Antenna)Document11 pagesTUP-M EST (Antenna)budoycarinoNo ratings yet
- Fix It Rule ToolDocument5 pagesFix It Rule ToolMie ShellNo ratings yet
- 1 N 4148Document4 pages1 N 4148swapnilharalNo ratings yet
- Comm Ch01 Intro enDocument29 pagesComm Ch01 Intro enMie ShellNo ratings yet
- Module 4 ElectricityDocument26 pagesModule 4 ElectricityHundeejireenyaNo ratings yet
- 02 Statics of Rigid Bodies 03 Rigid BodiesDocument10 pages02 Statics of Rigid Bodies 03 Rigid Bodiesjamal_jmyNo ratings yet
- E&M Equation SheetDocument9 pagesE&M Equation SheetDan WilkinsonNo ratings yet
- Intro and Basic Concepts-ThermDocument12 pagesIntro and Basic Concepts-ThermMie Shell100% (1)
- Gaussslaw 140506023741 Phpapp02Document21 pagesGaussslaw 140506023741 Phpapp02Mie ShellNo ratings yet
- Chapter 5 - Gauss LawDocument10 pagesChapter 5 - Gauss LawDamurasta NtlamelleNo ratings yet
- Walking On The GroundDocument1 pageWalking On The GroundMie ShellNo ratings yet
- Unit 1 2marksDocument5 pagesUnit 1 2marksLokesh SrmNo ratings yet
- Credentials List with Multiple Usernames, Passwords and Expiration DatesDocument1 pageCredentials List with Multiple Usernames, Passwords and Expiration DatesJOHN VEGANo ratings yet
- NEW CREW Fast Start PlannerDocument9 pagesNEW CREW Fast Start PlannerAnonymous oTtlhP100% (3)
- Metamorphic Rocks ImagesDocument7 pagesMetamorphic Rocks Imagesapi-289985616100% (1)
- Green Management: Nestlé's Approach To Green Management 1. Research and DevelopmentDocument6 pagesGreen Management: Nestlé's Approach To Green Management 1. Research and DevelopmentAbaidullah TanveerNo ratings yet
- Top 35 Brokerage Firms in PakistanDocument11 pagesTop 35 Brokerage Firms in PakistannasiralisauNo ratings yet
- The SAGE Handbook of Digital JournalismDocument497 pagesThe SAGE Handbook of Digital JournalismK JNo ratings yet
- The Human Resource Department of GIK InstituteDocument1 pageThe Human Resource Department of GIK InstitutexandercageNo ratings yet
- 04 Dasmarinas Vs Reyes GR No 108229Document2 pages04 Dasmarinas Vs Reyes GR No 108229Victoria Melissa Cortejos PulidoNo ratings yet
- ABS Rules for Steel Vessels Under 90mDocument91 pagesABS Rules for Steel Vessels Under 90mGean Antonny Gamarra DamianNo ratings yet
- Rencana Pembelajaran Semester Sistem Navigasi ElektronikDocument16 pagesRencana Pembelajaran Semester Sistem Navigasi ElektronikLastri AniNo ratings yet
- 3 Course Contents IIIBDocument5 pages3 Course Contents IIIBshahabNo ratings yet
- Understanding CTS Log MessagesDocument63 pagesUnderstanding CTS Log MessagesStudentNo ratings yet
- Chapter 1 Qus OnlyDocument28 pagesChapter 1 Qus OnlySaksharNo ratings yet
- The Value of Repeat Biopsy in SLEDocument8 pagesThe Value of Repeat Biopsy in SLESergio CerpaNo ratings yet
- Taxation of interest income paid to foreign corporationsDocument1 pageTaxation of interest income paid to foreign corporationsCass CataloNo ratings yet
- BS EN 364-1993 (Testing Methods For Protective Equipment AgaiDocument21 pagesBS EN 364-1993 (Testing Methods For Protective Equipment AgaiSakib AyubNo ratings yet
- Fundamentals of Real Estate ManagementDocument1 pageFundamentals of Real Estate ManagementCharles Jiang100% (4)
- Portable dual-input thermometer with RS232 connectivityDocument2 pagesPortable dual-input thermometer with RS232 connectivityTaha OpedNo ratings yet
- Hardened Concrete - Methods of Test: Indian StandardDocument16 pagesHardened Concrete - Methods of Test: Indian StandardjitendraNo ratings yet
- Applicants at Huye Campus SiteDocument4 pagesApplicants at Huye Campus SiteHIRWA Cyuzuzo CedricNo ratings yet
- Assignment-2: MCA204 Financial Accounting and ManagementDocument6 pagesAssignment-2: MCA204 Financial Accounting and ManagementrashNo ratings yet
- Abb Drives: User'S Manual Flashdrop Mfdt-01Document62 pagesAbb Drives: User'S Manual Flashdrop Mfdt-01Сергей СалтыковNo ratings yet
- Excavator Loading To Truck TrailerDocument12 pagesExcavator Loading To Truck TrailerThy RonNo ratings yet
- Server LogDocument5 pagesServer LogVlad CiubotariuNo ratings yet
- Management Pack Guide For Print Server 2012 R2Document42 pagesManagement Pack Guide For Print Server 2012 R2Quang VoNo ratings yet
- SDNY - Girl Scouts V Boy Scouts ComplaintDocument50 pagesSDNY - Girl Scouts V Boy Scouts Complaintjan.wolfe5356No ratings yet
- Q&A Session on Obligations and ContractsDocument15 pagesQ&A Session on Obligations and ContractsAnselmo Rodiel IVNo ratings yet
- PTAS-11 Stump - All About Learning CurvesDocument43 pagesPTAS-11 Stump - All About Learning CurvesinSowaeNo ratings yet
- AE383LectureNotes PDFDocument105 pagesAE383LectureNotes PDFPoyraz BulutNo ratings yet