You might also like
- Annexure I - Chemical Engineering Fluid Mechanics - 000 566Document1 pageAnnexure I - Chemical Engineering Fluid Mechanics - 000 566lalitlbw91No ratings yet
- Annexure I - Chemical Engineering Fluid Mechanics - 000 559Document1 pageAnnexure I - Chemical Engineering Fluid Mechanics - 000 559lalitlbw91No ratings yet
- Annexure I - Chemical Engineering Fluid Mechanics - 000 568Document1 pageAnnexure I - Chemical Engineering Fluid Mechanics - 000 568lalitlbw91No ratings yet
- Annexure I - Chemical Engineering Fluid Mechanics - 000 561Document1 pageAnnexure I - Chemical Engineering Fluid Mechanics - 000 561lalitlbw91No ratings yet
- 22 Matrix AlgebraDocument15 pages22 Matrix AlgebrakannanNo ratings yet
- Annexure I - Chemical Engineering Fluid Mechanics - 000 564Document1 pageAnnexure I - Chemical Engineering Fluid Mechanics - 000 564lalitlbw91No ratings yet
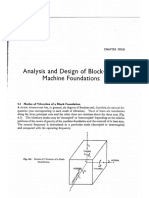
- Chapter 4 Analysis and Design of Block Type Machine FoundationDocument85 pagesChapter 4 Analysis and Design of Block Type Machine Foundationlalitlbw91No ratings yet
- Annexure I - Chemical Engineering Fluid Mechanics - 000 560Document1 pageAnnexure I - Chemical Engineering Fluid Mechanics - 000 560lalitlbw91No ratings yet
- Annexure I - Chemical Engineering Fluid Mechanics - 000 567Document1 pageAnnexure I - Chemical Engineering Fluid Mechanics - 000 567lalitlbw91No ratings yet
- Annexure I - Chemical Engineering Fluid Mechanics - 000 565Document1 pageAnnexure I - Chemical Engineering Fluid Mechanics - 000 565lalitlbw91No ratings yet
- Geometrical Properties of SectionsDocument12 pagesGeometrical Properties of SectionsAbuali Ahmad AbualiNo ratings yet
- 6 Thin Shell-Int PRDocument17 pages6 Thin Shell-Int PRkannan67% (3)
- Annexure I - Chemical Engineering Fluid Mechanics - 000 563Document1 pageAnnexure I - Chemical Engineering Fluid Mechanics - 000 563lalitlbw91No ratings yet
- Definition of Important Technical Terms in PRESSURE VESSELDocument6 pagesDefinition of Important Technical Terms in PRESSURE VESSELlalitlbw91No ratings yet
- Annexure I - Chemical Engineering Fluid Mechanics - 000 562Document1 pageAnnexure I - Chemical Engineering Fluid Mechanics - 000 562lalitlbw91No ratings yet
- Product Latent Heat of Evaporation: (KJ/KG) (Btu/lb) - HDocument4 pagesProduct Latent Heat of Evaporation: (KJ/KG) (Btu/lb) - Hmat333rNo ratings yet
- Asme b16.5 External Loads InterpratationDocument1 pageAsme b16.5 External Loads Interpratationlalitlbw91No ratings yet
- Conversion Factors To SIDocument2 pagesConversion Factors To SIlalitlbw91No ratings yet
- Chapter 1 Fundamental of ThermodynamicsDocument19 pagesChapter 1 Fundamental of Thermodynamicslalitlbw91No ratings yet
- Standards For Plant LayoutDocument7 pagesStandards For Plant Layoutlalitlbw91No ratings yet
- Unc Bolt Area - TemaDocument1 pageUnc Bolt Area - Temalalitlbw91No ratings yet
- Cut Off For Direct Second Year After Polytecgnic 2018Document808 pagesCut Off For Direct Second Year After Polytecgnic 2018lalitlbw91100% (1)
- Valid Eligiblity Criteria For Web 107 & WRC 297Document11 pagesValid Eligiblity Criteria For Web 107 & WRC 297lalitlbw91No ratings yet
- INTROCUCTION To Handbook of Machine FoundationsDocument7 pagesINTROCUCTION To Handbook of Machine Foundationslalitlbw91No ratings yet
- Gasketing M&Y ValuesDocument5 pagesGasketing M&Y Valueslalitlbw91No ratings yet
- Bolt and Nut MOCDocument1 pageBolt and Nut MOClalitlbw91No ratings yet
- General Principples of MechanicsDocument4 pagesGeneral Principples of Mechanicslalitlbw91No ratings yet
- Introduction To Process Equipment Design PDFDocument17 pagesIntroduction To Process Equipment Design PDFlalitlbw91No ratings yet
- Accurate Wetted Areas For Partially Filled VesselsDocument2 pagesAccurate Wetted Areas For Partially Filled Vesselsraghu.cecri805867% (3)
- Calculation of Deflectionof Beams - 13Document44 pagesCalculation of Deflectionof Beams - 13lalitlbw91100% (1)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5782)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- WORK PERMIT GAS TESTING GUIDEDocument39 pagesWORK PERMIT GAS TESTING GUIDEIbbad Ahmed MalikNo ratings yet
- Hydro Cracking Web AxensDocument11 pagesHydro Cracking Web Axensa_s_a_dNo ratings yet
- Drive Selection of Rolling MillsDocument4 pagesDrive Selection of Rolling MillsCihan OzturkNo ratings yet
- Electrochemical Cell LabDocument9 pagesElectrochemical Cell Labribots0% (1)
- APT (Programming Language) ..Document3 pagesAPT (Programming Language) ..Dick ManNo ratings yet
- Hidden BeamDocument4 pagesHidden BeamAbdulqudusNo ratings yet
- PSC Syllabus PDFDocument2 pagesPSC Syllabus PDFPerarasan MNo ratings yet
- Astava Catalog PDFDocument26 pagesAstava Catalog PDFPedro FonsecaNo ratings yet
- H Im pcs1Document42 pagesH Im pcs1Maria DazaNo ratings yet
- KuppaiDocument16 pagesKuppaiSoundaram RamanathanNo ratings yet
- Astm A47 (2014) PDFDocument5 pagesAstm A47 (2014) PDFStuar Tencio100% (1)
- Tensile StrengthDocument19 pagesTensile StrengthAshraful Himel100% (2)
- Chromatographic Separation of Amino Acids Pre-Lab Activity: Visto, Pamela I. Bs Bio-IiiDocument3 pagesChromatographic Separation of Amino Acids Pre-Lab Activity: Visto, Pamela I. Bs Bio-IiiPam VistoNo ratings yet
- Labs Best Practices EnergyDocument107 pagesLabs Best Practices EnergynumeriqueNo ratings yet
- Ferrous Metal - Iron and SteelDocument56 pagesFerrous Metal - Iron and Steelsubhash sureshNo ratings yet
- Plywood Used in So Many Different Ways: Eaturing Lywood in UildingsDocument23 pagesPlywood Used in So Many Different Ways: Eaturing Lywood in Uildingspilapil_jNo ratings yet
- Polyester Powder Coatings Technical DatasheetDocument2 pagesPolyester Powder Coatings Technical Datasheethoang BuiNo ratings yet
- Angle Grinder Catalogue GuideDocument32 pagesAngle Grinder Catalogue Guideandresboy123No ratings yet
- TALIS Desalination Solutions 2019 WebDocument16 pagesTALIS Desalination Solutions 2019 WebSakir ZakNo ratings yet
- HRSG 2015 PPT-1Document81 pagesHRSG 2015 PPT-1chdi100% (10)
- UG 45 CalculationDocument7 pagesUG 45 CalculationnirgaNo ratings yet
- Anti Graffiti Paint PresentationDocument10 pagesAnti Graffiti Paint PresentationpricettNo ratings yet
- Vibrations of Rotating Machinery Volume 1. Basic Rotordynamics Introduction To Practical Vibration Analysis - Osami MatsushitaDocument367 pagesVibrations of Rotating Machinery Volume 1. Basic Rotordynamics Introduction To Practical Vibration Analysis - Osami Matsushitaphucborso188% (8)
- Owner's Manual: UB20 12V DCDocument8 pagesOwner's Manual: UB20 12V DCMehmet YamanNo ratings yet
- Aeb 1FDocument12 pagesAeb 1FGustavo ZavalaNo ratings yet
- BL Dwez 01Document118 pagesBL Dwez 01David FerminNo ratings yet
- Chiller CarrierDocument40 pagesChiller CarrierNicolas MatiasNo ratings yet
- Manufacturers Restricted Substance List (MRSL) Declaration FormDocument8 pagesManufacturers Restricted Substance List (MRSL) Declaration FormDyeing DyeingNo ratings yet
- Raffmetal: UNI EN 1676 and 1706Document1 pageRaffmetal: UNI EN 1676 and 1706swaroop NalamNo ratings yet