You might also like
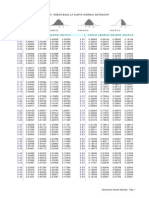
- Tablas Areas Bajo La Curva Normal EstandarDocument5 pagesTablas Areas Bajo La Curva Normal EstandarOscar CarbalNo ratings yet
- 2200 Precision Move Pallet System Engineering Manual 851 795 RevBDocument44 pages2200 Precision Move Pallet System Engineering Manual 851 795 RevBRodrigo ReyesNo ratings yet
- drv8825 PDFDocument32 pagesdrv8825 PDFGerson FelipeNo ratings yet
- Labprogramming The TMS320C6713 DSP Starter Kit (DSK) Module6Document14 pagesLabprogramming The TMS320C6713 DSP Starter Kit (DSK) Module6ripalpatelNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- VDL-441 BrochureDocument6 pagesVDL-441 Brochuresam keilorNo ratings yet
- Sii9437/Sii9438 Arc/Enhanced Arc Receiver and TransmitterDocument9 pagesSii9437/Sii9438 Arc/Enhanced Arc Receiver and TransmittergfihusdfiuhNo ratings yet
- Pilibhit BisalpurDocument24 pagesPilibhit BisalpurNeelabh MaheshNo ratings yet
- 2022 Annual Report-E PDFDocument325 pages2022 Annual Report-E PDFF550VNo ratings yet
- Closedrmc1 13 16Document1 pageClosedrmc1 13 16Abhishek RajputNo ratings yet
- Ee502 26Document19 pagesEe502 26Gopi RamNo ratings yet
- Tanggal No Jurnal Keterangan Debit Kredit Saldo Note I Saldo Awal Per 31 Desember 2020Document35 pagesTanggal No Jurnal Keterangan Debit Kredit Saldo Note I Saldo Awal Per 31 Desember 2020RUSMAWAN SHNo ratings yet
- Led TV : Owner'S ManualDocument40 pagesLed TV : Owner'S ManualOrlando VilladiegoNo ratings yet
- Cathodic Protection - ShipDocument2 pagesCathodic Protection - ShipDinakaranNo ratings yet
- Xaht Gsm1800-65-XpolDocument1 pageXaht Gsm1800-65-XpolКурбан УмархановNo ratings yet
- PLCC Terminal ETL-41 Technical SpecificationDocument19 pagesPLCC Terminal ETL-41 Technical SpecificationArbab AslamNo ratings yet
- Logic Gates and Full Adder Design in VerilogDocument20 pagesLogic Gates and Full Adder Design in VerilogShahid241 alam100% (1)
- EE 109 System ProtectionDocument4 pagesEE 109 System ProtectionIan Acuzar PunzalanNo ratings yet
- Yuken HydraulicDocument24 pagesYuken HydraulicDian Pramadi100% (1)
- Infrared Datasheet PDFDocument7 pagesInfrared Datasheet PDFMizael AlonsoNo ratings yet
- Dibal Dmi-610Document1 pageDibal Dmi-610Octavian MateiNo ratings yet
- STR-A6252M: Switching RegulatorsDocument13 pagesSTR-A6252M: Switching RegulatorsAntonioPeriniNo ratings yet
- CELL-DYN Ruby SYSTEM. Field Service Training WorkbookDocument258 pagesCELL-DYN Ruby SYSTEM. Field Service Training WorkbookАлексПрынзинNo ratings yet
- Ada4898 1 - 4898 2Document20 pagesAda4898 1 - 4898 2FilipBlachaNo ratings yet
- PCIe Certification Guide ForDocument11 pagesPCIe Certification Guide Form3y54mNo ratings yet
- UM00 ACS2000 - 4kVUserManualRevFDocument214 pagesUM00 ACS2000 - 4kVUserManualRevFJuscelio Damascena100% (1)
- Icepower200sc Datasheet 1.3Document20 pagesIcepower200sc Datasheet 1.3Oleg LiederNo ratings yet
- Service Manual: PP P PDocument110 pagesService Manual: PP P PEdson LimaNo ratings yet
- Mitsubishi Electric MAC-567IF-E Installation Manual EngDocument12 pagesMitsubishi Electric MAC-567IF-E Installation Manual EngxillanaNo ratings yet
- Pioneer DDJ sx3 rrv4685Document56 pagesPioneer DDJ sx3 rrv4685Alex100% (2)
- Service Manual Philips DCM2060Document31 pagesService Manual Philips DCM2060Imraan RamdjanNo ratings yet
- Bias Scout Kit: Inventory of PartsDocument8 pagesBias Scout Kit: Inventory of PartsCesar TorrellesNo ratings yet
- Combivert: AntriebstechnikDocument14 pagesCombivert: AntriebstechnikOSAMANo ratings yet
- Debug 1214Document19 pagesDebug 1214Ivan StevkovskiNo ratings yet
- 1-4x HV Troubleshooting PDFDocument46 pages1-4x HV Troubleshooting PDFEmmanuel VirtudazoNo ratings yet