You might also like
- Vector6 ComDocument1 pageVector6 ComTran Van ThucNo ratings yet
- Manuscript 02Document9 pagesManuscript 02Tran Van ThucNo ratings yet
- Thuat Toan DKDocument94 pagesThuat Toan DKTran Van ThucNo ratings yet
- Full C Rio Dev GuideDocument285 pagesFull C Rio Dev GuidesriswathiNo ratings yet
- Thuat Toan DKDocument12 pagesThuat Toan DKTran Van ThucNo ratings yet
- An EMG-Driven Weight Support System With Pneumatic Artificial MuscleDocument3 pagesAn EMG-Driven Weight Support System With Pneumatic Artificial MuscleTran Van ThucNo ratings yet
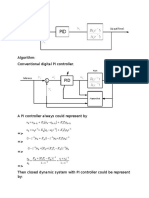
- Conventional Digital PI ControllerDocument4 pagesConventional Digital PI ControllerTran Van ThucNo ratings yet
- Shift Registers LabViewDocument5 pagesShift Registers LabViewTran Van ThucNo ratings yet
- 660 - Circuit Analysis I With MATLAB Computing and Simulink SimPowerSystems ModelingDocument618 pages660 - Circuit Analysis I With MATLAB Computing and Simulink SimPowerSystems ModelinggunturdedyprasetyaNo ratings yet
- Medgadget Artificial MusclepdfDocument3 pagesMedgadget Artificial MusclepdfTran Van ThucNo ratings yet
- NI Tutorial 12950 enDocument15 pagesNI Tutorial 12950 enTran Van ThucNo ratings yet
- Adaptive Fuzzy Robust Tracking Controller DesignDocument13 pagesAdaptive Fuzzy Robust Tracking Controller DesignHoàng HảiNo ratings yet
- Feedback Linearization and LQ Based Constrained Predictive ControlDocument19 pagesFeedback Linearization and LQ Based Constrained Predictive ControlTran Van ThucNo ratings yet
- Learning SimulinkDocument572 pagesLearning Simulinkmarrakamasutras100% (28)
- Sit04 Mit MatlabDocument205 pagesSit04 Mit MatlabTran Van ThucNo ratings yet
- Spring Design HandbookDocument199 pagesSpring Design Handbooklakshmanakumarr97% (31)
- System Identification Labview ToolkitDocument87 pagesSystem Identification Labview ToolkitTran Van ThucNo ratings yet
- Self-Tuning Controllers Simulink LibraryDocument6 pagesSelf-Tuning Controllers Simulink LibraryTran Van ThucNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 01 Smart Forms343411328079517Document117 pages01 Smart Forms343411328079517Kishore ReddyNo ratings yet
- Peningkatan Keterampilan & Ekonomi Ibu-Ibu PKK Melalui Pengolahan Limbah Kain (Perca) Di Kelurahan Way KandisDocument11 pagesPeningkatan Keterampilan & Ekonomi Ibu-Ibu PKK Melalui Pengolahan Limbah Kain (Perca) Di Kelurahan Way Kandisikamisa korwiljatimNo ratings yet
- Beginning Mobile App Development With React Native SampleDocument24 pagesBeginning Mobile App Development With React Native SampleSuneel ShastryNo ratings yet
- Assignment ON Microprocessor AND Microcontroller: Joyal Jose AugustineDocument63 pagesAssignment ON Microprocessor AND Microcontroller: Joyal Jose Augustineajas777BNo ratings yet
- NCE V100R018C10 Configuration Guide (IP+Optical Services) 01-C PDFDocument140 pagesNCE V100R018C10 Configuration Guide (IP+Optical Services) 01-C PDFyug100% (2)
- Avaya Aura 8 1 1 Offer Definition2Document196 pagesAvaya Aura 8 1 1 Offer Definition2Juan Montejo100% (1)
- BRD - Mobile Wallet 7.0 - Accounting ManualDocument252 pagesBRD - Mobile Wallet 7.0 - Accounting Manualaya100% (1)
- Solid Edge Fundamentals PDFDocument1,539 pagesSolid Edge Fundamentals PDFOtto Heinrich Wehmann100% (1)
- 2011 06 14 AVKS LDAP SSO Integration PDFDocument28 pages2011 06 14 AVKS LDAP SSO Integration PDFsaicharan3979No ratings yet
- Tunnelling Protocols Coursework 1Document12 pagesTunnelling Protocols Coursework 1John GibsonNo ratings yet
- GRTrend XDocument30 pagesGRTrend XXcap TebeoNo ratings yet
- RM 1599 Nett RM 2499 RM 980 Nett RM 1738: Desktop PC Package SystemDocument1 pageRM 1599 Nett RM 2499 RM 980 Nett RM 1738: Desktop PC Package SystemKhay SaadNo ratings yet
- Banqeut Hall MumbaiDocument237 pagesBanqeut Hall MumbaiKristie GarciaNo ratings yet
- Manual Allplan BCM QuantitiesDocument193 pagesManual Allplan BCM Quantitiessectiune79No ratings yet
- Coca ColaDocument7 pagesCoca ColaKhushi Chadha100% (2)
- VBA FIND ALL FUNCTIONDocument16 pagesVBA FIND ALL FUNCTIONYamini ShindeNo ratings yet
- TuxGuitar Tutorial PDFDocument22 pagesTuxGuitar Tutorial PDFWilfred DoelmanNo ratings yet
- Mysql Workshop Environment: Ivan Ma 2019-03Document8 pagesMysql Workshop Environment: Ivan Ma 2019-03Dang Huu AnhNo ratings yet
- (ANOVA) F-Distribution TableDocument7 pages(ANOVA) F-Distribution TableCharlene BihasaNo ratings yet
- Data Structures CAATTs ExtractionDocument11 pagesData Structures CAATTs ExtractionjpandaNo ratings yet
- The Bodhi Tree: Concept By: Ravi Kr. MishraDocument11 pagesThe Bodhi Tree: Concept By: Ravi Kr. Mishranabamita pyneNo ratings yet
- Ac 500Document188 pagesAc 500max_ingNo ratings yet
- Registered variables and data typesDocument17 pagesRegistered variables and data typestrivediurvishNo ratings yet
- Newton Raphson MethodDocument36 pagesNewton Raphson MethodAkansha YadavNo ratings yet
- DSL Engineering PDFDocument558 pagesDSL Engineering PDFJuliano PiresNo ratings yet
- Sha 3Document6 pagesSha 3Pktc BKNo ratings yet
- 18Mem/Mpd/Mpe/Mpm/Mpt/ Mpy/Mse/Mde/Mea/Mmd11: (10 Marks)Document2 pages18Mem/Mpd/Mpe/Mpm/Mpt/ Mpy/Mse/Mde/Mea/Mmd11: (10 Marks)ShaswathMurtuguddeNo ratings yet
- Hspice RFDocument452 pagesHspice RFSandeep SriramNo ratings yet
- Intaglio User GuideDocument62 pagesIntaglio User Guideprimitivehuman100% (1)
- NIPO ODIN Scripter's GuideDocument416 pagesNIPO ODIN Scripter's GuideAndreea Georgiana Ilie-Postolache100% (2)