You might also like
- Impacts of Tunnelling On GroundwaterDocument31 pagesImpacts of Tunnelling On GroundwaterkrainajackaNo ratings yet
- Roof Collapses During Construction of LPG Storage CavernDocument7 pagesRoof Collapses During Construction of LPG Storage CavernkrainajackaNo ratings yet
- A Call For Detailed Rock Slope GuidanceDocument3 pagesA Call For Detailed Rock Slope GuidancekrainajackaNo ratings yet
- Slope Stability Analysis FoSDocument6 pagesSlope Stability Analysis FoSkrainajackaNo ratings yet
- Groundwater Dynamic Method and Parameter Analysis of Tunnel Water InflowDocument4 pagesGroundwater Dynamic Method and Parameter Analysis of Tunnel Water InflowkrainajackaNo ratings yet
- An Overview On Methods For Slope Stability Analysis: Mr. Digvijay P. Salunkhe Assist. Prof. Guruprasd ChvanDocument8 pagesAn Overview On Methods For Slope Stability Analysis: Mr. Digvijay P. Salunkhe Assist. Prof. Guruprasd ChvanAbu AimonNo ratings yet
- Determination Method For Influence Zone of Pumped Storage Underground Cavern and Drainage SystemDocument13 pagesDetermination Method For Influence Zone of Pumped Storage Underground Cavern and Drainage SystemkrainajackaNo ratings yet
- Groundwater Control For Cross PassagesDocument6 pagesGroundwater Control For Cross PassageskrainajackaNo ratings yet
- Seepage Behavior and Grouting Effects For Large Rock CavernsDocument8 pagesSeepage Behavior and Grouting Effects For Large Rock CavernskrainajackaNo ratings yet
- Determination Method For Influence Zone of Pumped Storage Underground Cavern and Drainage SystemDocument13 pagesDetermination Method For Influence Zone of Pumped Storage Underground Cavern and Drainage SystemkrainajackaNo ratings yet
- Slope stability standardsDocument5 pagesSlope stability standardskrainajackaNo ratings yet
- Rock Slope Processes and Recommended Methods For AnalysisDocument8 pagesRock Slope Processes and Recommended Methods For AnalysiskrainajackaNo ratings yet
- Modified rock mass classification for preliminary rock slope designDocument9 pagesModified rock mass classification for preliminary rock slope designkrainajackaNo ratings yet
- Rock Slopes PDFDocument12 pagesRock Slopes PDFAPGENCO EENo ratings yet
- Design of The Metrowest Pressure TunnelDocument19 pagesDesign of The Metrowest Pressure Tunnelelisa02No ratings yet
- Modelling and Analysis of The ExcavationDocument12 pagesModelling and Analysis of The ExcavationkhuNo ratings yet
- Design of Underground Structures and Analysis of Self-Support CapacityDocument12 pagesDesign of Underground Structures and Analysis of Self-Support CapacitykrainajackaNo ratings yet
- Cockatoo Island Pit Dewatering and Wall Depressurisation Behind Critical Seawall InfrastructureDocument14 pagesCockatoo Island Pit Dewatering and Wall Depressurisation Behind Critical Seawall InfrastructurekrainajackaNo ratings yet
- Design of Concrete Linings of Pressure Tunnels and Shafts For External Water PressureDocument11 pagesDesign of Concrete Linings of Pressure Tunnels and Shafts For External Water PressurekrainajackaNo ratings yet
- 2012 Eurock Shafts PDFDocument12 pages2012 Eurock Shafts PDFsafinasal7432No ratings yet
- Dwss Part1 Basics of HydraulicsDocument97 pagesDwss Part1 Basics of HydraulicsGJ CCNo ratings yet
- Chapter 1 Introduction: 1.1 BackgroundDocument18 pagesChapter 1 Introduction: 1.1 BackgroundkrainajackaNo ratings yet
- SOME On POWERDocument2 pagesSOME On POWERkrainajackaNo ratings yet
- Numerical Modelling of Interface Grouting Pressure - Seeber DiagramDocument72 pagesNumerical Modelling of Interface Grouting Pressure - Seeber DiagramkrainajackaNo ratings yet
- Materials: Ffect of Internal Pressure On Radial Strain ofDocument12 pagesMaterials: Ffect of Internal Pressure On Radial Strain ofkrainajackaNo ratings yet
- Top Interview QuestionsDocument2 pagesTop Interview QuestionskrainajackaNo ratings yet
- 21 Decisive Design Basis Parameters Power Plant CavernsDocument7 pages21 Decisive Design Basis Parameters Power Plant CavernscopinxaNo ratings yet
- Deepwater Pipeline Design Against Collapse Under External PressureDocument25 pagesDeepwater Pipeline Design Against Collapse Under External PressurekrainajackaNo ratings yet
- Analysis of Emerging Technologies in The H - 2019 - Renewable and Sustainable enDocument18 pagesAnalysis of Emerging Technologies in The H - 2019 - Renewable and Sustainable enKramnai NartlebNo ratings yet
- Policy Guidelines On Small Hydropower ProjectsDocument37 pagesPolicy Guidelines On Small Hydropower ProjectskrainajackaNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- DevelopmentThatPays ScrumToScrumban CheatSheet 2 - 0Document1 pageDevelopmentThatPays ScrumToScrumban CheatSheet 2 - 0tarikNo ratings yet
- Circle Generation AlgorithmDocument3 pagesCircle Generation AlgorithmAhmed AjmalNo ratings yet
- HTML5 Element Cheatsheet 2019Document1 pageHTML5 Element Cheatsheet 2019vVvNo ratings yet
- Fossa FO 0015 0035 A Technical Data en 9aaDocument2 pagesFossa FO 0015 0035 A Technical Data en 9aaFatih YAŞARNo ratings yet
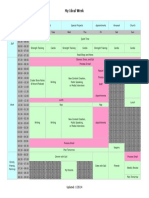
- My Ideal Week PDFDocument1 pageMy Ideal Week PDFAnonymous QE45TVC9e3No ratings yet
- Machine TimeDocument11 pagesMachine TimeFRANCIS THOMASNo ratings yet
- BK - Scrum and CMMIDocument132 pagesBK - Scrum and CMMIcoolgoroNo ratings yet
- Jobber JR DetailsDocument2 pagesJobber JR DetailsUrvish PatelNo ratings yet
- Solar Powered Automatic Toilet LightDocument10 pagesSolar Powered Automatic Toilet LightarwinNo ratings yet
- Citrix Xen Desktop Interview Questions and Answers - Citrix Xen Desktop FAQsDocument3 pagesCitrix Xen Desktop Interview Questions and Answers - Citrix Xen Desktop FAQsAnonymous rNmxZViYaNo ratings yet
- Learjet 45 Pilot Traning Manual Volumen 2Document539 pagesLearjet 45 Pilot Traning Manual Volumen 2Agustin Bernales88% (8)
- Electronics QuestionnaireDocument4 pagesElectronics QuestionnaireRenie FedericoNo ratings yet
- Tapered Roller Bearings, RBC Tapered Thrust Bearings: Producing High-Quality Products Since 1929Document16 pagesTapered Roller Bearings, RBC Tapered Thrust Bearings: Producing High-Quality Products Since 1929eblees100No ratings yet
- Tablet ToolingDocument51 pagesTablet ToolingDr. Muhammad Imran Khan100% (2)
- ARK Survival 600 Player Level CapDocument16 pagesARK Survival 600 Player Level CapArcTrooper210No ratings yet
- BS Basics Boundary Scan PDFDocument2 pagesBS Basics Boundary Scan PDFShankar ArunmozhiNo ratings yet
- Blasting and Painting of Sheds, Pipes, Pipe Fittings, Vessels and Tanks DailyDocument3 pagesBlasting and Painting of Sheds, Pipes, Pipe Fittings, Vessels and Tanks DailyEjike Francis ChizobaNo ratings yet
- Lot Inspection Report For LPG New CylindersDocument3 pagesLot Inspection Report For LPG New CylindersJagannath MajhiNo ratings yet
- Precast Concrete Septic Tank 5000dsDocument1 pagePrecast Concrete Septic Tank 5000dsMarco Vega TaipeNo ratings yet
- Imageclass Lbp611cn 613cdw 2Document2 pagesImageclass Lbp611cn 613cdw 2Maulana Ikhwan SadikinNo ratings yet
- ExMED Debrief 2019Document16 pagesExMED Debrief 2019Hamilton WintersNo ratings yet
- Project calculation sheet for pull-out capacity of holding down boltsDocument1 pageProject calculation sheet for pull-out capacity of holding down boltsKhalid ElazharyNo ratings yet
- QUICK GUIDE To Installing Oracle Database 11gR2 - PART1Document7 pagesQUICK GUIDE To Installing Oracle Database 11gR2 - PART1Peter AsanNo ratings yet
- Online School Management System Integrated With Accounting Management SystemDocument24 pagesOnline School Management System Integrated With Accounting Management SystemKIRUTHIKA SNo ratings yet
- Insulation ProductsDocument1 pageInsulation ProductsDygoPalNo ratings yet
- Sound level meter covers noise applicationsDocument2 pagesSound level meter covers noise applicationsAbigail DextreNo ratings yet
- Mario Stifano Graphic Designer CVDocument1 pageMario Stifano Graphic Designer CVmariostifanoNo ratings yet
- Differences Between Routers, Switches and HubsDocument2 pagesDifferences Between Routers, Switches and HubsPappu KhanNo ratings yet
- Grand Rapids Controls LPA Checksheet AuditDocument7 pagesGrand Rapids Controls LPA Checksheet Auditalliceyew100% (3)
- MDN 1508DSDocument108 pagesMDN 1508DSdocazanNo ratings yet