You might also like
- Pic 16 FDocument63 pagesPic 16 FKit Vi Điều Khiển100% (1)
- Multimeter Kit v1Document10 pagesMultimeter Kit v1Kit Vi Điều KhiểnNo ratings yet
- Pic 16 FDocument63 pagesPic 16 FKit Vi Điều Khiển100% (1)
- GaDocument6 pagesGaKit Vi Điều KhiểnNo ratings yet
- Ethernet Module ENC28J60 Arduino PDFDocument5 pagesEthernet Module ENC28J60 Arduino PDFArdian Ramadita SugaraNo ratings yet
- Eel Rpy Board 1406 WebDocument1 pageEel Rpy Board 1406 WebKit Vi Điều KhiểnNo ratings yet
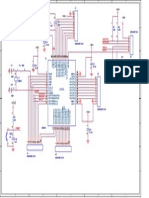
- Schemat - STM32F103VCT6 - BoardDocument9 pagesSchemat - STM32F103VCT6 - BoardAnugrah Raden100% (1)
- Hy32d SCHDocument1 pageHy32d SCHKit Vi Điều KhiểnNo ratings yet
- Schematic LED Dong Ho 24HDocument1 pageSchematic LED Dong Ho 24HKit Vi Điều KhiểnNo ratings yet
- Pic 16 FDocument63 pagesPic 16 FKit Vi Điều Khiển100% (1)
- Sg8V1 Programing Schematic: IC Design Research & Education CenterDocument1 pageSg8V1 Programing Schematic: IC Design Research & Education CenterKit Vi Điều Khiển100% (1)
- Sg8v1 PCB AdapterDocument1 pageSg8v1 PCB AdapterKit Vi Điều Khiển100% (1)
- Ccs Asm PDFDocument332 pagesCcs Asm PDFKit Vi Điều KhiểnNo ratings yet
- 3.3V-5V REG: ManualDocument4 pages3.3V-5V REG: ManualKit Vi Điều KhiểnNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Solving Rational Equations and InequalitiesDocument5 pagesSolving Rational Equations and InequalitiesJaycint - Rud PontingNo ratings yet
- The Focus Shooting Method CourseDocument48 pagesThe Focus Shooting Method CourseKobiXDNo ratings yet
- Contemporary Philippine Arts From The Regions: Quarter 3Document15 pagesContemporary Philippine Arts From The Regions: Quarter 3Ackie Inacay RosarioNo ratings yet
- Matlab For SolidworksDocument18 pagesMatlab For SolidworksAle' AmoudiNo ratings yet
- Your Song RitaDocument1 pageYour Song Ritacalysta felix wNo ratings yet
- PCB Table of Contents GuideDocument3 pagesPCB Table of Contents GuidePreet ChahalNo ratings yet
- Electrolyte Turns On The Solar Cell: 2009 Project SummaryDocument1 pageElectrolyte Turns On The Solar Cell: 2009 Project SummaryAshu SarasNo ratings yet
- Advanced Technologies of CDQ Plant Advanced Technologies of CDQ PlantDocument12 pagesAdvanced Technologies of CDQ Plant Advanced Technologies of CDQ Plant조기현No ratings yet
- What Is RTN/Microwave TechnologyDocument27 pagesWhat Is RTN/Microwave TechnologyRavan AllahverdiyevNo ratings yet
- Module 1 Introduction To Ecology and The BiosphereDocument38 pagesModule 1 Introduction To Ecology and The BiosphereFrancis Rey Bactol PilapilNo ratings yet
- Vectors FoundationDocument8 pagesVectors FoundationNaning RarasNo ratings yet
- 5-in-1 Document Provides Lessons on Trees and Environmental ConservationDocument45 pages5-in-1 Document Provides Lessons on Trees and Environmental ConservationPriya DharshiniNo ratings yet
- Aminet 110 en PDFDocument17 pagesAminet 110 en PDFWahid AliNo ratings yet
- General Guidelines For Design and Construction of Concrete Diaphram (Slurry) WallsDocument108 pagesGeneral Guidelines For Design and Construction of Concrete Diaphram (Slurry) WallsharleyNo ratings yet
- Koh Pich Construction Company Cambodia-China Polytechnic University Daily Activities ReportDocument7 pagesKoh Pich Construction Company Cambodia-China Polytechnic University Daily Activities ReportNhoek RenNo ratings yet
- ABS Fire Extinguisher CatalogueDocument56 pagesABS Fire Extinguisher CatalogueqwertyNo ratings yet
- Dr. Carlos S. Lanting College: College of Maritime EducationDocument14 pagesDr. Carlos S. Lanting College: College of Maritime EducationJeynard Moler J. TanNo ratings yet
- TacoDocument12 pagesTaconguyennhan2190No ratings yet
- Service and Repair Instructions: Water & WastewaterDocument72 pagesService and Repair Instructions: Water & WastewaterLa Marina Mantenimiento100% (1)
- M O Publications Index Worldwide CoverageDocument5 pagesM O Publications Index Worldwide CoverageloloNo ratings yet
- Installation & Testing of Fire Protection SystemsDocument7 pagesInstallation & Testing of Fire Protection Systemssunny_84tNo ratings yet
- Error Correction - Test 1Document4 pagesError Correction - Test 1phucnguyen0429No ratings yet
- Tenofovir Disoproxil Fumarate: Riefing - Nfrared BsorptionDocument4 pagesTenofovir Disoproxil Fumarate: Riefing - Nfrared BsorptionMostofa RubalNo ratings yet
- PENERAPAN ARSITEKTUR TROPIS PADA HOTEL RESORT DI PANTAI KRAKALDocument12 pagesPENERAPAN ARSITEKTUR TROPIS PADA HOTEL RESORT DI PANTAI KRAKALleo adoNo ratings yet
- Analytical Chemistry Lecture Exercise 2 Mole-Mole Mass-Mass: Sorsogon State CollegeDocument2 pagesAnalytical Chemistry Lecture Exercise 2 Mole-Mole Mass-Mass: Sorsogon State CollegeJhon dave SurbanoNo ratings yet
- Anhydrous Ammonia Unloading Station & Storage/Vaporizer SystemDocument2 pagesAnhydrous Ammonia Unloading Station & Storage/Vaporizer SystemWalter Rigamonti100% (1)
- Tyco TY8281 TFP680 - 03 - 2023Document17 pagesTyco TY8281 TFP680 - 03 - 2023First LAstNo ratings yet
- The Anglican Digest - Winter 2022Document64 pagesThe Anglican Digest - Winter 2022The Anglican Digest100% (1)
- Radiesse Pálpebras Gox-8-E2633Document7 pagesRadiesse Pálpebras Gox-8-E2633Camila CrosaraNo ratings yet
- Dr. Ghusoon Mohsin Ali: Al-Mustansiriya University College of Engineering Electrical Engineering DepartmentDocument89 pagesDr. Ghusoon Mohsin Ali: Al-Mustansiriya University College of Engineering Electrical Engineering Departmentهمام الركابي100% (1)