You might also like
- 100 Top Analog Electronics Questions and Answers PDF Analog Electronics QuestionsDocument8 pages100 Top Analog Electronics Questions and Answers PDF Analog Electronics QuestionsRavi Raj100% (1)
- Electronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 1From EverandElectronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 1No ratings yet
- UGRD-ECE6205-Signals-Spectra-and-Signal-Processing-legit-not-quizess MidALLDocument19 pagesUGRD-ECE6205-Signals-Spectra-and-Signal-Processing-legit-not-quizess MidALLJitlee Papa100% (3)
- FFT For ExperimentalistsDocument24 pagesFFT For ExperimentalistsMara FelipeNo ratings yet
- Digital Signal ProcessingDocument101 pagesDigital Signal ProcessingDheekshith ShettigaraNo ratings yet
- Frequency Domain ProcessingDocument42 pagesFrequency Domain ProcessingInJune YeoNo ratings yet
- Interactions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsFrom EverandInteractions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsNo ratings yet
- Invertor 12-220vDocument3 pagesInvertor 12-220vBorcan Cristi100% (4)
- Satellite Communication and Mobile CommunicationDocument73 pagesSatellite Communication and Mobile CommunicationAkshay KumarNo ratings yet
- Feynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterFrom EverandFeynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterNo ratings yet
- P14N TM en 9 PDFDocument476 pagesP14N TM en 9 PDFSittiporn KulsapsakNo ratings yet
- Digital Communications Formula SheetDocument13 pagesDigital Communications Formula SheetSrikanth Reddy Komatireddy100% (1)
- Easy(er) Electrical Principles for Extra Class Ham License (2012-2016)From EverandEasy(er) Electrical Principles for Extra Class Ham License (2012-2016)No ratings yet
- University 2 Marks Ans DTSSPDocument5 pagesUniversity 2 Marks Ans DTSSPsanth_213No ratings yet
- Chapter4 PDFDocument11 pagesChapter4 PDFAmirul AizadNo ratings yet
- Intermodulation Product Computing Techniques For Broadband Active Transmit SystemsDocument10 pagesIntermodulation Product Computing Techniques For Broadband Active Transmit SystemsNarci EdsonNo ratings yet
- Exp1 PDFDocument12 pagesExp1 PDFanon_435139760No ratings yet
- Art01 IDocument10 pagesArt01 IArsyad CahyaNo ratings yet
- Filter Structure - Part 1: (Chapter 7 - Mitra's Textbook)Document44 pagesFilter Structure - Part 1: (Chapter 7 - Mitra's Textbook)Xuân VinhNo ratings yet
- Microwave FiltersDocument20 pagesMicrowave FiltersDiptiman BiswasNo ratings yet
- Adaptive Beam-Forming For Satellite Communication: by Prof. Binay K. Sarkar ISRO Chair ProfessorDocument50 pagesAdaptive Beam-Forming For Satellite Communication: by Prof. Binay K. Sarkar ISRO Chair ProfessorNisha Kumari100% (1)
- Digital Signal Processing LabDocument26 pagesDigital Signal Processing LabDurotan123No ratings yet
- Component - UART V2.50Document11 pagesComponent - UART V2.50ANNAPUREDDY RAVINDER REDDYNo ratings yet
- A Novel Power Harmonic Analysis Method Based On Nuttall-Kaiser Combination Window Double Spectrum Interpolated FFT AlgorithmDocument9 pagesA Novel Power Harmonic Analysis Method Based On Nuttall-Kaiser Combination Window Double Spectrum Interpolated FFT AlgorithmrxNo ratings yet
- Advanced Windowed Interpolated FFT Algorithms For Harmonic Analysis of Electrical Power SystemDocument6 pagesAdvanced Windowed Interpolated FFT Algorithms For Harmonic Analysis of Electrical Power SystemYatheesh KaggereNo ratings yet
- DFT and FFT Explained: A Concise GuideDocument17 pagesDFT and FFT Explained: A Concise GuideTrí NguyễnNo ratings yet
- Yupin Suppakhun, Pornchai Supnithi: KKU Res J 13 (4) : May 2008Document4 pagesYupin Suppakhun, Pornchai Supnithi: KKU Res J 13 (4) : May 2008Nung NingNo ratings yet
- Lecture 2Document26 pagesLecture 2Ahmed Diaa AlwakilNo ratings yet
- 9 HRTHDocument22 pages9 HRTHNithindev GuttikondaNo ratings yet
- Lesson17 2Document34 pagesLesson17 2api-277477207No ratings yet
- Name:-Akshay Dhawale Div: - ET-B (Batch 1) Roll No: - 7 Title: Implementation of Digital FIR Filter Problem StatementDocument6 pagesName:-Akshay Dhawale Div: - ET-B (Batch 1) Roll No: - 7 Title: Implementation of Digital FIR Filter Problem StatementUttarwar RuturajNo ratings yet
- Abstract: Dispersive Linear Systems With Negative Group Delay Have Caused Much Confusion in TheDocument11 pagesAbstract: Dispersive Linear Systems With Negative Group Delay Have Caused Much Confusion in TheMarkoCimbaljevicNo ratings yet
- Performance Analysis of Different Inverse Filter Design TechniquesDocument7 pagesPerformance Analysis of Different Inverse Filter Design TechniquesEditor IJSETNo ratings yet
- Transmission Line (TL) Approach of Left-Handed (LH) MaterialsDocument18 pagesTransmission Line (TL) Approach of Left-Handed (LH) MaterialsmenguemengueNo ratings yet
- 2 System Overview: 2.1 ApplicationsDocument17 pages2 System Overview: 2.1 ApplicationsYuqi ZhaoNo ratings yet
- Department of Electronics and Communication Engineering: Digital Signal ProcessingDocument25 pagesDepartment of Electronics and Communication Engineering: Digital Signal ProcessingSETNHILNo ratings yet
- DSP Te1 Answer KeyDocument21 pagesDSP Te1 Answer KeyshankarNo ratings yet
- Modeling Baseband SignalsDocument21 pagesModeling Baseband SignalsAhmed Musa AlShormanNo ratings yet
- SAW Tech PresentationDocument145 pagesSAW Tech PresentationWilliam LuNo ratings yet
- Design of FIR Filters: Z N H Z H e e e e ZDocument11 pagesDesign of FIR Filters: Z N H Z H e e e e Zapi-19804922No ratings yet
- Optimization and Efficient Implementation of Fractional Delay Fir FiltersDocument4 pagesOptimization and Efficient Implementation of Fractional Delay Fir FiltersHitendra SinghNo ratings yet
- Teaching Digital Signal Processing Using PSpice PDFDocument6 pagesTeaching Digital Signal Processing Using PSpice PDFbhushanchittaragiNo ratings yet
- Tutorial-1 Low Noise Amplifier (LNA) Design: ObjectiveDocument18 pagesTutorial-1 Low Noise Amplifier (LNA) Design: ObjectiveJohn WalkerNo ratings yet
- Digital Signal Processing NotesDocument18 pagesDigital Signal Processing NotesDanial ZamanNo ratings yet
- FREQDocument15 pagesFREQjohn alNo ratings yet
- Spatial Signal Processing BeamformingDocument42 pagesSpatial Signal Processing BeamformingDuval FortesNo ratings yet
- Duo Binary Modulation For Optical SystemsDocument10 pagesDuo Binary Modulation For Optical SystemsErasmo VizzaccaroNo ratings yet
- Katholieke Universiteit Leuven, E.E. Dept., Kasteelpark Arenberg 10, B-3001 Heverlee, Belgium Email: (Deepaknath - Tandur, Marc - Moonen) @esat - Kuleuven.beDocument4 pagesKatholieke Universiteit Leuven, E.E. Dept., Kasteelpark Arenberg 10, B-3001 Heverlee, Belgium Email: (Deepaknath - Tandur, Marc - Moonen) @esat - Kuleuven.beSoumitra BhowmickNo ratings yet
- Johnson Noise and Shot Noise: Electronic Address: Dvp@mit - EduDocument4 pagesJohnson Noise and Shot Noise: Electronic Address: Dvp@mit - EduMark Paul Santin GanzalinoNo ratings yet
- Fundamentals and Literature Review of Fourier Transform in Power Quality IssuesDocument14 pagesFundamentals and Literature Review of Fourier Transform in Power Quality IssuesFrew FrewNo ratings yet
- The DC Blocking Filter - J de Freitas Jan 2007Document7 pagesThe DC Blocking Filter - J de Freitas Jan 2007Hiếu Trung HoàngNo ratings yet
- Complex Adaptive FIR Notch Filter for Frequency EstimationDocument3 pagesComplex Adaptive FIR Notch Filter for Frequency EstimationAbelardo AlvarezNo ratings yet
- Exp#02 Analysing Biomedical Signal Using DFT and Reconstruct The Signal Using IDFTDocument6 pagesExp#02 Analysing Biomedical Signal Using DFT and Reconstruct The Signal Using IDFTMuhammad Muinul IslamNo ratings yet
- University of Salford School of Acoustics and Electronic EngineeringDocument10 pagesUniversity of Salford School of Acoustics and Electronic EngineeringJulio Figueroa JaluffNo ratings yet
- Chapter4 PDFDocument8 pagesChapter4 PDFZahra Mir BagheriNo ratings yet
- Lab10 PDFDocument12 pagesLab10 PDFJoshua HernandezNo ratings yet
- Digital Signal ProcessingDocument40 pagesDigital Signal Processingshankar100% (2)
- Experment Butterworth FilterDocument6 pagesExperment Butterworth FilterSayantan RoyNo ratings yet
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- 8 port-MBMF-65-18QDE-S-8 PortsDocument3 pages8 port-MBMF-65-18QDE-S-8 Portsbudi wirahmiNo ratings yet
- Ultrasonic RADAR Project using Microcontroller and Stepper MotorDocument6 pagesUltrasonic RADAR Project using Microcontroller and Stepper Motorricky100% (3)
- Esp32-Solo-1 FCC BT CertificateDocument1 pageEsp32-Solo-1 FCC BT Certificatemyk stoneNo ratings yet
- Transfer Functions Lecture Ch02Document23 pagesTransfer Functions Lecture Ch02Minh Nhut TrinhNo ratings yet
- Distribution SS GuidelinesDocument52 pagesDistribution SS GuidelinesibrahimNo ratings yet
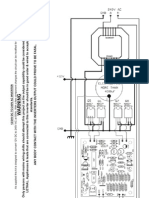
- Kingsley Custom 30 User Information: Please Be Sure To Read The Following Check List Before Turning The Amplifier ON!Document5 pagesKingsley Custom 30 User Information: Please Be Sure To Read The Following Check List Before Turning The Amplifier ON!lighetiNo ratings yet
- Audio Spotlighting Seminar Presentation at Siddartha Institute of Science and TechnologyDocument19 pagesAudio Spotlighting Seminar Presentation at Siddartha Institute of Science and TechnologyRasiNo ratings yet
- C Sensors: Item Code: 570000447 Part Number:10 LDR 10mmDocument2 pagesC Sensors: Item Code: 570000447 Part Number:10 LDR 10mmAeFondevillaNo ratings yet
- William Stallings Computer Organization and Architecture: Parallel ProcessingDocument40 pagesWilliam Stallings Computer Organization and Architecture: Parallel ProcessingreinaldoopusNo ratings yet
- Solution Chapter1 2Document5 pagesSolution Chapter1 2Mona NaiduNo ratings yet
- JVC Camcorder GR-DVL145EG Diagrama EsquematicoDocument36 pagesJVC Camcorder GR-DVL145EG Diagrama EsquematicosilvertronicNo ratings yet
- Wireless Notice-Board Using Node MCUDocument4 pagesWireless Notice-Board Using Node MCURahul SharmaNo ratings yet
- 145 W PC Forward ConverterDocument40 pages145 W PC Forward Convertershin swNo ratings yet
- Digitize Ramp Showing ADC OperationDocument6 pagesDigitize Ramp Showing ADC OperationVinoth Kumar RajendranNo ratings yet
- Flat Panel Plasma TV - Renesas Electronics-2014Document3 pagesFlat Panel Plasma TV - Renesas Electronics-2014910pcsupportNo ratings yet
- XMOS vs. FPGADocument6 pagesXMOS vs. FPGAXMOS100% (1)
- Direct-lit LED 4K LCD Display with 500 cd/m2 BrightnessDocument4 pagesDirect-lit LED 4K LCD Display with 500 cd/m2 BrightnessChristianNo ratings yet
- Compact NS - 630A - 33472Document2 pagesCompact NS - 630A - 33472archi marcianoNo ratings yet
- Camouflaged Antenna Datasheet - V1.0Document37 pagesCamouflaged Antenna Datasheet - V1.0KonstantinNo ratings yet
- Irepeater Install Manual2Document2 pagesIrepeater Install Manual2Vivek JhaNo ratings yet
- Pre Ph.D. Electronics and Communication EnggDocument49 pagesPre Ph.D. Electronics and Communication EnggKavita KamerikarNo ratings yet
- Instruction Manual AVTM TTR25 For TTR25 Handheld TTR Transformer Turn Ratio Test Set Catalog No. TTR25Document76 pagesInstruction Manual AVTM TTR25 For TTR25 Handheld TTR Transformer Turn Ratio Test Set Catalog No. TTR25Sergio Arturo Lazalde CamposNo ratings yet
- BJT CharacteristicsDocument8 pagesBJT CharacteristicsTadapaneni SnehithaNo ratings yet
- Recent Research Papers On Digital Signal ProcessingDocument6 pagesRecent Research Papers On Digital Signal Processingvstxevplg100% (1)
- GSM Frequency PlanningDocument10 pagesGSM Frequency PlanningAyoub ZahraouiNo ratings yet
- Led TV: Owner'S ManualDocument332 pagesLed TV: Owner'S ManualBernardo LinaresNo ratings yet