You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Thermo NotesDocument20 pagesThermo NotesWyte RockNo ratings yet
- Design Considerations and Important NotesDocument32 pagesDesign Considerations and Important NotesSougata DasNo ratings yet
- Effect of Admixtures On Properties of Alkali-Activated Slag ConcreteDocument8 pagesEffect of Admixtures On Properties of Alkali-Activated Slag ConcreteSougata DasNo ratings yet
- Structure Repairs & Rehabilitation Presentation No.3Document98 pagesStructure Repairs & Rehabilitation Presentation No.3Sougata DasNo ratings yet
- Murshidabad Institute of Technology: Subject: Ce Project-I/Internal Exam FM 50Document3 pagesMurshidabad Institute of Technology: Subject: Ce Project-I/Internal Exam FM 50Sougata DasNo ratings yet
- Design of Pile CapDocument6 pagesDesign of Pile CapJasy DasNo ratings yet
- Determinate Structures Are Analysed Just by The Use of Basic EquilibriumDocument10 pagesDeterminate Structures Are Analysed Just by The Use of Basic EquilibriumSougata DasNo ratings yet
- Strength and Flow 80316Document12 pagesStrength and Flow 80316Sougata DasNo ratings yet
- Admix NIL: Strength and FlowDocument2 pagesAdmix NIL: Strength and FlowSougata DasNo ratings yet
- 1sd Dec 2015Document1 page1sd Dec 2015Sougata DasNo ratings yet
- Calculation of Materials: ResultDocument6 pagesCalculation of Materials: ResultSougata DasNo ratings yet
- W/ggbs Wsub Wwet WD N%Document6 pagesW/ggbs Wsub Wwet WD N%Sougata DasNo ratings yet
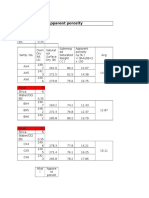
- Apparent Porosity: Alkali 6 Silica 6 Water/GG BSDocument4 pagesApparent Porosity: Alkali 6 Silica 6 Water/GG BSSougata DasNo ratings yet
- HW 2. ProblemsDocument5 pagesHW 2. ProblemsAruzhanNo ratings yet
- Section II A SA-430 - SA-430MDocument7 pagesSection II A SA-430 - SA-430MSocrates MoralesNo ratings yet
- Porosity or PermeabilityDocument30 pagesPorosity or PermeabilitytabibkarimNo ratings yet
- Moment-Curvature Relationship of Glass Fiber Reinforced Self Compacting Recycled Aggregate ConcreteDocument10 pagesMoment-Curvature Relationship of Glass Fiber Reinforced Self Compacting Recycled Aggregate ConcreteMr PolashNo ratings yet
- Surface Erosion of Wind Turbine Blades:: Leon Mishnaevsky JRDocument16 pagesSurface Erosion of Wind Turbine Blades:: Leon Mishnaevsky JRLeonNo ratings yet
- 1D Elasticity 02 ElastodynamicsDocument17 pages1D Elasticity 02 Elastodynamics박남수No ratings yet
- Light Emitting Diode (LED) - Working, Construction and Symbol - DiodeDocument19 pagesLight Emitting Diode (LED) - Working, Construction and Symbol - DiodehavejsnjNo ratings yet
- SIEMENS - Realy For Railway SystemsDocument21 pagesSIEMENS - Realy For Railway SystemssamNo ratings yet
- Properties and Application of MetalsDocument15 pagesProperties and Application of MetalsPikaNo ratings yet
- Review of Strengthening RC Columns With FRP Compos-2Document70 pagesReview of Strengthening RC Columns With FRP Compos-2Rishika DixitNo ratings yet
- Chapter 5 - Welding of High-Alloy Steels, Corrosion PDFDocument19 pagesChapter 5 - Welding of High-Alloy Steels, Corrosion PDFEmad A.AhmadNo ratings yet
- 1Q - Week 3 Physical ScienceDocument14 pages1Q - Week 3 Physical ScienceJEBONIE TUBICE100% (1)
- Tabel BaresDocument25 pagesTabel BaresJordy CoolNo ratings yet
- Disclosure To Promote The Right To Information: IS 9550 (2001) : Bright Steel Bars (MTD 4: Wrought Steel Products)Document14 pagesDisclosure To Promote The Right To Information: IS 9550 (2001) : Bright Steel Bars (MTD 4: Wrought Steel Products)anand.bharadwajNo ratings yet
- 200 Series General Purpose Vector AC Drive: Operation ManualDocument82 pages200 Series General Purpose Vector AC Drive: Operation ManualsmartnaizllcNo ratings yet
- 04-100-R1 Magnetite AnodesDocument5 pages04-100-R1 Magnetite AnodesomarNo ratings yet
- Tutorial 3 Natural Convection Ansys CFXDocument20 pagesTutorial 3 Natural Convection Ansys CFXsunilpatil.043827No ratings yet
- GKS 112 305 064 A 1502MDocument1 pageGKS 112 305 064 A 1502MCindy RiveraNo ratings yet
- CST Thermal1Document16 pagesCST Thermal1Edison Andres Zapata OchoaNo ratings yet
- Ch12 Free Energy and ThermodynamicsDocument8 pagesCh12 Free Energy and ThermodynamicsCitrus_EscapeNo ratings yet
- UPS Neuttral EarthingDocument11 pagesUPS Neuttral Earthingarun kumarNo ratings yet
- Surface Tension and Interfacial PhenomenonDocument36 pagesSurface Tension and Interfacial PhenomenonamitNo ratings yet
- Teaching Case Study: Heat TransferDocument4 pagesTeaching Case Study: Heat TransferJulendra AriatedjaNo ratings yet
- EC501 - 1 - Intro - History (Compatibility Mode)Document20 pagesEC501 - 1 - Intro - History (Compatibility Mode)Naishadh BhavsarNo ratings yet
- Electrical Measurements and Instrumentation July 2023Document7 pagesElectrical Measurements and Instrumentation July 2023Shanmukh VegiNo ratings yet
- BabbittDocument4 pagesBabbitthrsreenathNo ratings yet
- Optimization of Shell and Tube Heat Exchanger 2Document46 pagesOptimization of Shell and Tube Heat Exchanger 2SynesiusNo ratings yet
- Transduction PrinciplesDocument14 pagesTransduction PrinciplesNavin KaranthNo ratings yet
- Autopipe Reference Information: Fluid Transient MethodDocument6 pagesAutopipe Reference Information: Fluid Transient MethodJohn NashNo ratings yet