You might also like
- Scan & Pay Jio BillDocument22 pagesScan & Pay Jio BillsumeetNo ratings yet
- High Impedance Resistor CalculationDocument1 pageHigh Impedance Resistor CalculationIsuru WijewardeneNo ratings yet
- Face To Face Pre-Intermediate B1Document162 pagesFace To Face Pre-Intermediate B1Andra OlariNo ratings yet
- Popular Mechanics 2010-06Document171 pagesPopular Mechanics 2010-06BookshebooksNo ratings yet
- Workflowy - 2. Using Tags For NavigationDocument10 pagesWorkflowy - 2. Using Tags For NavigationSteveLangNo ratings yet
- MI 276 Rev B - Conversion of Turbochargers For Opposite Engine RotationDocument15 pagesMI 276 Rev B - Conversion of Turbochargers For Opposite Engine RotationJesse BarnettNo ratings yet
- RET - 615 - Transformer Protection Operational ManualDocument152 pagesRET - 615 - Transformer Protection Operational Manualfiatraj1No ratings yet
- Areva KBCH Transformer Diff RelayDocument451 pagesAreva KBCH Transformer Diff RelaybirjueNo ratings yet
- Shop SupervisionDocument38 pagesShop SupervisionSakura Yuno Gozai80% (5)
- 7-How To Test 7sa522Document39 pages7-How To Test 7sa522ahmedNo ratings yet
- Cable Diff. 11,22KV Specification 4-4-2006Document3 pagesCable Diff. 11,22KV Specification 4-4-2006Mouhemed MouhaNo ratings yet
- ECE Laws and Ethics NotesDocument29 pagesECE Laws and Ethics Notesmars100% (1)
- REB500 Relay PDFDocument72 pagesREB500 Relay PDFmmsa100% (1)
- Introduction To GemologyDocument286 pagesIntroduction To GemologyEhtesham Siddiqui100% (2)
- BEF Calculation - Part 1 PDFDocument8 pagesBEF Calculation - Part 1 PDFLin Heng100% (1)
- Relay Type / Make: GE T60 General Data:: SYS FmaxDocument6 pagesRelay Type / Make: GE T60 General Data:: SYS FmaxAntony JoeNo ratings yet
- Line Distance Protection IED REL 670Document47 pagesLine Distance Protection IED REL 670kass_ecs100% (1)
- 26 Relay Testing Techniques, Requirements, Considerations MDocument8 pages26 Relay Testing Techniques, Requirements, Considerations Mgagan0312No ratings yet
- Technical Information For Motor Protection IPDDocument40 pagesTechnical Information For Motor Protection IPDAhmed AshourNo ratings yet
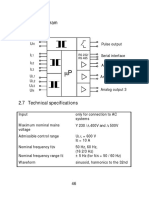
- 7kg6000 Transducer SpecificationDocument8 pages7kg6000 Transducer SpecificationwiyatnoNo ratings yet
- Zig Zag Transformer Applications and Advantages - ECE TutorialsDocument4 pagesZig Zag Transformer Applications and Advantages - ECE TutorialsSureshraja9977No ratings yet
- Lab 06-Differential Bus Bar ProtectionDocument6 pagesLab 06-Differential Bus Bar ProtectionAliza SharifNo ratings yet
- Tech REF615 High-Impedance Differential 757207 ENaDocument10 pagesTech REF615 High-Impedance Differential 757207 ENaFredrikNo ratings yet
- Column and Thin Layer ChromatographyDocument5 pagesColumn and Thin Layer Chromatographymarilujane80% (5)
- Gen Relay Settings - MICOM P343Document6 pagesGen Relay Settings - MICOM P343Abinand MuraliNo ratings yet
- P631 Up To P634: Transformer Differential Protection DevicesDocument32 pagesP631 Up To P634: Transformer Differential Protection DevicestunghtdNo ratings yet
- Is 8686 Specification For Static Protective Relays R0Document14 pagesIs 8686 Specification For Static Protective Relays R0Kunal MandalaywalaNo ratings yet
- Feeder Terminal Product Guide REF 542plusDocument28 pagesFeeder Terminal Product Guide REF 542plusRazvan MaresNo ratings yet
- Is.3156.3.1992 Voltage Transformers, Part 3 Protective Voltage Transformers PDFDocument10 pagesIs.3156.3.1992 Voltage Transformers, Part 3 Protective Voltage Transformers PDFMukesh KumarNo ratings yet
- Is 3231 0 1986 PDFDocument10 pagesIs 3231 0 1986 PDFsuresh kumarNo ratings yet
- Site Test Report Date: Al-Osais Co. KHUDARIYAH S/S 115/13.8 KV S/S CT Supervision Relay - MVTPDocument4 pagesSite Test Report Date: Al-Osais Co. KHUDARIYAH S/S 115/13.8 KV S/S CT Supervision Relay - MVTPsikander843562No ratings yet
- Is 4758 1968Document19 pagesIs 4758 1968karthikraja21No ratings yet
- Is 2309 1989 PDFDocument72 pagesIs 2309 1989 PDFpatitay036817No ratings yet
- Is 2705, PS Class CTDocument8 pagesIs 2705, PS Class CTSatya VasuNo ratings yet
- Disclosure To Promote The Right To InformationDocument10 pagesDisclosure To Promote The Right To InformationbinodeNo ratings yet
- Disclosure To Promote The Right To InformationDocument8 pagesDisclosure To Promote The Right To InformationsrukeerNo ratings yet
- Insulation Resistance TestingDocument3 pagesInsulation Resistance TestingAJB2010No ratings yet
- IS 10322: 1987 (Part 5 / Sec 3)Document11 pagesIS 10322: 1987 (Part 5 / Sec 3)ychodneker0% (1)
- Indian Standard: Specification For Interconnecting Bus-Bars For Ac Voltage Above 1 KV Up To and Including 36 KVDocument25 pagesIndian Standard: Specification For Interconnecting Bus-Bars For Ac Voltage Above 1 KV Up To and Including 36 KVrobinknit2009No ratings yet
- Generator HRG CalculationsDocument3 pagesGenerator HRG CalculationsnoneofyabiznasNo ratings yet
- A Revolution in Circuit Breaker TechnologyDocument5 pagesA Revolution in Circuit Breaker Technologymanirup_tceNo ratings yet
- Tap Changer IonDocument6 pagesTap Changer IonS ManoharNo ratings yet
- Presentation 7sd610 enDocument29 pagesPresentation 7sd610 enMohamed WahidNo ratings yet
- Indian Standard: Recommended Short-Circuit Ratings of High Voltage PVC Cables (Document14 pagesIndian Standard: Recommended Short-Circuit Ratings of High Voltage PVC Cables (Prashant TrivediNo ratings yet
- RED670 LDCM Module Communication IssuesDocument4 pagesRED670 LDCM Module Communication IssuesSellappan MuthusamyNo ratings yet
- Basic AC/DC Drives TrainingDocument4 pagesBasic AC/DC Drives Trainingvaithy1990No ratings yet
- Capacitor Voltage TransformerDocument1 pageCapacitor Voltage Transformerdeep_sparklingNo ratings yet
- 33kV - Cap - Bank-SIKAP - Spec - FY 12-13 - 30.11.11-Cesc - 20 MVARDocument9 pages33kV - Cap - Bank-SIKAP - Spec - FY 12-13 - 30.11.11-Cesc - 20 MVARSatyajit RaiNo ratings yet
- 6.PCS-9705 Bay Control UnitDocument2 pages6.PCS-9705 Bay Control UnitHoward LamonNo ratings yet
- Technical Instruction ABB RED670Document10 pagesTechnical Instruction ABB RED670Iqball ArdiyanNo ratings yet
- 7sd52 7sd62 ConfigurationDocument14 pages7sd52 7sd62 ConfigurationWilber LucasNo ratings yet
- PLCC Tech Specification SummaryDocument23 pagesPLCC Tech Specification SummaryVirgo PremNo ratings yet
- Is 3842 2 1966 PDFDocument21 pagesIs 3842 2 1966 PDFSuraj GangwarNo ratings yet
- Synchronization of OMICRON CMC Test Sets Via IRIG-BDocument21 pagesSynchronization of OMICRON CMC Test Sets Via IRIG-BMosa DalahmaNo ratings yet
- Content: 1. Dimensiong of CT S 2. Error Definitions 3. General Design Aspects 4. Linear CoresDocument9 pagesContent: 1. Dimensiong of CT S 2. Error Definitions 3. General Design Aspects 4. Linear CoresmshahidshaukatNo ratings yet
- MD32-TM: Percentage Biased Transformer Differential RelayDocument5 pagesMD32-TM: Percentage Biased Transformer Differential RelaySandeep DeodharNo ratings yet
- Distance Protection RelayDocument27 pagesDistance Protection RelaycallkalaiNo ratings yet
- Siemens 7SD610 V4.7 Template Manual ENU TU3.10 V1.121Document20 pagesSiemens 7SD610 V4.7 Template Manual ENU TU3.10 V1.121RaúlEmirGutiérrezLópezNo ratings yet
- The Electricity Act - 2003Document84 pagesThe Electricity Act - 2003Austindaniel JoelsimeonNo ratings yet
- Bus Bar Protection: External FaultsDocument4 pagesBus Bar Protection: External FaultsChanderSinghWarkadeNo ratings yet
- Line Differential Relay 7SD52Document17 pagesLine Differential Relay 7SD52Anonymous 9VcxlFErfNo ratings yet
- 1 19 Battery Earth Fault RelayDocument4 pages1 19 Battery Earth Fault RelayMuhammad NomanNo ratings yet
- Developing Automated HIL TestsDocument10 pagesDeveloping Automated HIL Testskalinath41No ratings yet
- RTDS - A Fully Digital Power System Simulator PDFDocument6 pagesRTDS - A Fully Digital Power System Simulator PDFLeonardo MarquesNo ratings yet
- Introduction of RTDSDocument11 pagesIntroduction of RTDSSUJIT KUMAR MONDALNo ratings yet
- Emtdc Users Guide v4 6 0Document201 pagesEmtdc Users Guide v4 6 0Michael SaandNo ratings yet
- Running Head:: Describe The Uses of Waiting Line AnalysesDocument6 pagesRunning Head:: Describe The Uses of Waiting Line AnalysesHenry AnubiNo ratings yet
- 16SEE - Schedule of PapersDocument36 pages16SEE - Schedule of PapersPiyush Jain0% (1)
- Mock DataDocument56 pagesMock DataAnonymous O2bvbOuNo ratings yet
- COP Oil: For Epiroc Components We Combine Technology and Environmental SustainabilityDocument4 pagesCOP Oil: For Epiroc Components We Combine Technology and Environmental SustainabilityDavid CarrilloNo ratings yet
- Stage TwoDocument34 pagesStage TwoThar LattNo ratings yet
- Penomoran Bantex - K64&COMPDocument8 pagesPenomoran Bantex - K64&COMPVigour Rizko MurdyneNo ratings yet
- India An Archaeological History Palaeolithic Beginnings To Early Historic Foundations (Dilip K. Chakrabarti) (Z-Library)Document437 pagesIndia An Archaeological History Palaeolithic Beginnings To Early Historic Foundations (Dilip K. Chakrabarti) (Z-Library)soumadri.2023.1301No ratings yet
- Daftar PustakaDocument3 pagesDaftar PustakaNurha ZizahNo ratings yet
- Studying Supply and Demand of Software Maintenance and Evolution ServicesDocument6 pagesStudying Supply and Demand of Software Maintenance and Evolution ServicesJorge Arturo Moreno VeasNo ratings yet
- Y06209 November 2015Document28 pagesY06209 November 2015Fredy CoyagoNo ratings yet
- Water Sampling and Borehole Inspection FormsDocument2 pagesWater Sampling and Borehole Inspection FormsSibanda MqondisiNo ratings yet
- Tomas Del Rosario College: Department: EDUCATIONDocument12 pagesTomas Del Rosario College: Department: EDUCATIONveehneeNo ratings yet
- Timeline of Internet in The PhilippinesDocument29 pagesTimeline of Internet in The PhilippinesJhayson Joeshua Rubio100% (1)
- Lec08 (Topic 4 Define Classes)Document33 pagesLec08 (Topic 4 Define Classes)huaiencheengNo ratings yet
- Superficial ConclusionDocument49 pagesSuperficial ConclusionIngrid ParissNo ratings yet
- The Eukaryotic Replication Machine: D. Zhang, M. O'DonnellDocument39 pagesThe Eukaryotic Replication Machine: D. Zhang, M. O'DonnellÁgnes TóthNo ratings yet
- 2VAA001695 en S Control NTCS04 Controller Station Termination UnitDocument43 pages2VAA001695 en S Control NTCS04 Controller Station Termination UnitanbarasanNo ratings yet
- DrdoDocument2 pagesDrdoAvneet SinghNo ratings yet
- A Sample of Directory or Instruction:: World Temperatures February 16Document1 pageA Sample of Directory or Instruction:: World Temperatures February 16eksaNo ratings yet
- DAFTAR PUSTAKA Generik vs Branded Drug ReferencesDocument4 pagesDAFTAR PUSTAKA Generik vs Branded Drug ReferencesRika MardiahNo ratings yet
- DRM 25Document14 pagesDRM 25Anantha RajanNo ratings yet