You might also like
- Prontuario Scienze Delle CostruzioniDocument9 pagesProntuario Scienze Delle CostruzioniGiulio PalamàNo ratings yet
- Lastre Piane TDC LMDocument28 pagesLastre Piane TDC LMteocomiNo ratings yet
- 4 Geometria Delle MasseDocument20 pages4 Geometria Delle MasseFederica MililloNo ratings yet
- L'equazione Differenziale Della Linea ElasticaDocument11 pagesL'equazione Differenziale Della Linea ElasticaPaolo BirattaNo ratings yet
- Linea ElasticaDocument12 pagesLinea ElasticaVirgilio TinariNo ratings yet
- La Deformazione Elastica Delle TraviDocument44 pagesLa Deformazione Elastica Delle TraviAdrian Seidelman100% (1)
- Il Problema Di Saint Venant (B)Document13 pagesIl Problema Di Saint Venant (B)Christos TsaropoulosNo ratings yet
- Travi CurveDocument4 pagesTravi CurvePippo FrancoNo ratings yet
- Costruzioni Di AcciaioDocument28 pagesCostruzioni Di AcciaioMario MereniNo ratings yet
- 09 Pendii TaylorDocument25 pages09 Pendii TaylorGianluca FontanaNo ratings yet
- Linea ElasticaDocument180 pagesLinea ElasticaMarco LeonoriNo ratings yet
- Piastre PDFDocument43 pagesPiastre PDFroccia1989No ratings yet
- 06-Tensioni Nelle Travi V1-6Document33 pages06-Tensioni Nelle Travi V1-6staedtlerpNo ratings yet
- Comp M2Document33 pagesComp M2marcoNo ratings yet
- 02 - Parte II - Stati Piani Di Tensione e Deformazione - 6Document11 pages02 - Parte II - Stati Piani Di Tensione e Deformazione - 6Armando Di ChiaraNo ratings yet
- Bending of BeamsDocument27 pagesBending of Beamsgabrielitos7891No ratings yet
- Risoluzione Del Problema Di de Saint Venant PDFDocument6 pagesRisoluzione Del Problema Di de Saint Venant PDFAndreaAlberoNo ratings yet
- Esercizio 2 InstabilitàDocument31 pagesEsercizio 2 InstabilitàMarco Raneo PezzanoNo ratings yet
- 06-Tensioni Nelle Travi V1-6Document33 pages06-Tensioni Nelle Travi V1-6Alessandro Riposi100% (1)
- Flessione Plus Geometria Aree Ver 11 CompressedDocument59 pagesFlessione Plus Geometria Aree Ver 11 CompressedimphudaNo ratings yet
- SDC 03 Rev3Document37 pagesSDC 03 Rev3salvo2miceliNo ratings yet
- Flessione RettaDocument57 pagesFlessione RettaDavide MaranoNo ratings yet
- Torsi OneDocument6 pagesTorsi OneMary Joyce AlvarezNo ratings yet
- Il Campo RotanteDocument20 pagesIl Campo RotanteAndreaRaviolaNo ratings yet
- Lastre PianeDocument43 pagesLastre PianeandreahankNo ratings yet
- Statica Travi e Fili PDFDocument41 pagesStatica Travi e Fili PDFleluz__No ratings yet
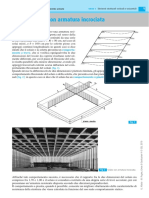
- Solai Solette Armatura Incrociata PDFDocument10 pagesSolai Solette Armatura Incrociata PDFAleksiey PellicciaNo ratings yet
- Peli LiberiDocument62 pagesPeli LiberiElton MirakaNo ratings yet
- Lezione 04 PDFDocument8 pagesLezione 04 PDFBianca MansiNo ratings yet
- Cap EstensimetriDocument7 pagesCap EstensimetriArmando_84No ratings yet
- Progetto Di Piastre StrisceDocument14 pagesProgetto Di Piastre StrisceAndrea InfusoNo ratings yet
- Campi Scalari e VettorialiDocument3 pagesCampi Scalari e Vettorialimandrake1985No ratings yet
- Generalità Sui GanciDocument8 pagesGeneralità Sui Gancialigi33No ratings yet
- Flessione Progetto VerificaDocument12 pagesFlessione Progetto VerificaAntonello SerratoreNo ratings yet
- Equazioni Di MaxwellDocument19 pagesEquazioni Di MaxwellRiflessologia PlantareNo ratings yet
- Dispense Meccanica Delle StruttureDocument43 pagesDispense Meccanica Delle StruttureFrancesca SartiniNo ratings yet
- Macchine Elettriche 3Document12 pagesMacchine Elettriche 3Anonymous f3iGLjxNo ratings yet
- Lezione16 Aste ComposteDocument18 pagesLezione16 Aste ComposteAndreaMercuriNo ratings yet
- 03-Carichi DistribuitiDocument3 pages03-Carichi DistribuitiGra MaNo ratings yet
- Appunti Taglio Nel C.A. - Prof. de LucaDocument30 pagesAppunti Taglio Nel C.A. - Prof. de LucaSergio grilloNo ratings yet
- Geometria Delle AreeDocument13 pagesGeometria Delle AreeFederica MililloNo ratings yet
- LEZIONE 4 - Local EffectDocument24 pagesLEZIONE 4 - Local EffectLuca Dal MolinNo ratings yet
- 04 Dispense OndeDocument37 pages04 Dispense OndeMassimilianoTerenziNo ratings yet
- Propagazione OndeDocument32 pagesPropagazione OndeAle85toNo ratings yet
- Cilindri in PressioneDocument14 pagesCilindri in PressioneMaurizio La VillettaNo ratings yet
- Risposte Alle DomandeDocument6 pagesRisposte Alle Domandechiara chiaraNo ratings yet
- Rpartizione Carichi SismiciDocument11 pagesRpartizione Carichi SismiciAnonymous jG19GTAh8No ratings yet
- DocPlinto A BicchiereDocument8 pagesDocPlinto A Bicchierepietro.corradiniNo ratings yet
- Linea Elastica Flessionale - TecnoLogicaDocument1 pageLinea Elastica Flessionale - TecnoLogicaTrinchettoNo ratings yet
- 5b Lezione Sollecitazioni Semplici TosioneDocument26 pages5b Lezione Sollecitazioni Semplici TosioneSara ZaherNo ratings yet
- La seconda prova di matematica e fisica: svolgimento commentato delle prove ufficiali 2019From EverandLa seconda prova di matematica e fisica: svolgimento commentato delle prove ufficiali 2019No ratings yet
- Esercizi di fisica: ottica e elettromagnetismoFrom EverandEsercizi di fisica: ottica e elettromagnetismoRating: 5 out of 5 stars5/5 (1)
- Test - Introduzione Alla Geometria AnaliticaDocument6 pagesTest - Introduzione Alla Geometria Analiticafra82webNo ratings yet
- Diogene Laerzio Vite Dei Filosofi Libro VIII Pitagora PDFDocument28 pagesDiogene Laerzio Vite Dei Filosofi Libro VIII Pitagora PDFBeatrice Udai Nath PolidoriNo ratings yet
- Musica E Filosofia Nel Pitagorismo 9788865420843 476138Document169 pagesMusica E Filosofia Nel Pitagorismo 9788865420843 476138Cavaliere Rosso100% (1)
- Comminuzione e Leggi EnergeticheDocument15 pagesComminuzione e Leggi EnergeticheNicola CeratoNo ratings yet