You might also like
- Esercizi di fisica per licei: fluidodinamica e termodinamicaFrom EverandEsercizi di fisica per licei: fluidodinamica e termodinamicaRating: 5 out of 5 stars5/5 (1)
- Aerodinamica Del Velivolo (Cap.5)Document16 pagesAerodinamica Del Velivolo (Cap.5)jonathan.gelli5153100% (1)
- ISTITUZIONI-Di Ing. AerospazialeDocument30 pagesISTITUZIONI-Di Ing. Aerospazialefenix_realeNo ratings yet
- Aeroplano e Le Sue PartiDocument22 pagesAeroplano e Le Sue Partiproxymo1No ratings yet
- Calcolo Volo LivellatoDocument29 pagesCalcolo Volo LivellatoAnonimoNo ratings yet
- Meccanica Del VoloDocument144 pagesMeccanica Del VoloFabrizio GiuliettiNo ratings yet
- Appunti Di Strutture PDFDocument182 pagesAppunti Di Strutture PDFNgul ThometNo ratings yet
- Meccanica Del Volo Spaziale - Parte1Document68 pagesMeccanica Del Volo Spaziale - Parte1Giancarlo PaolettiNo ratings yet
- QDM 03 TensoriDocument41 pagesQDM 03 Tensorimaurizio_naddeo3601100% (1)
- Elementi Di Aerodinamica by Mauro DaridaDocument219 pagesElementi Di Aerodinamica by Mauro DaridaCiccozzi58100% (1)
- (Meccanica Applicata Alle Macchine) Meccanica Delle VibrazioniDocument112 pages(Meccanica Applicata Alle Macchine) Meccanica Delle VibrazioniFedericoCNo ratings yet
- Esercitazioni Di Gasdinamica Shock WavesDocument57 pagesEsercitazioni Di Gasdinamica Shock WavesCarlo FarlocchianoNo ratings yet
- Serie Di FourierDocument15 pagesSerie Di Fourierp.pal6197No ratings yet
- Fenomeni Di TrasportoDocument27 pagesFenomeni Di TrasportoMirko GraneseNo ratings yet
- Soluzione Es 3Document21 pagesSoluzione Es 3LeonardoMadeira11No ratings yet
- Spinta Intro PDFDocument14 pagesSpinta Intro PDFAlessandro Soli100% (1)
- Corrente AlternataDocument28 pagesCorrente AlternataCenci SimoneNo ratings yet
- algebraIeII 0809Document175 pagesalgebraIeII 0809keynote76No ratings yet
- Anteprima Meccanica Del VoloDocument20 pagesAnteprima Meccanica Del VoloAndrea QuinciNo ratings yet
- Germano 1Document27 pagesGermano 1Luigi LutriNo ratings yet
- GA Corso Completo (Brundu-Landi)Document171 pagesGA Corso Completo (Brundu-Landi)mammtNo ratings yet
- Macchine 05 PDFDocument32 pagesMacchine 05 PDFbrufraNo ratings yet
- Equazioni Di MaxwellDocument11 pagesEquazioni Di Maxwellalfonso_belfioreNo ratings yet
- 01-Meccanica Del Volo SpazialeDocument11 pages01-Meccanica Del Volo Spazialemarcobianchi198000No ratings yet
- Impianto COMBUSTIBILE AeronauticoDocument16 pagesImpianto COMBUSTIBILE AeronauticoMartinoNo ratings yet
- Dispense GEODESIADocument80 pagesDispense GEODESIAAgapito ScogliamiglioNo ratings yet
- Esercizio N. 2Document12 pagesEsercizio N. 2Lerry AnsaldiNo ratings yet
- Equazioni Differenziali - Esercizi Risolti PDFDocument25 pagesEquazioni Differenziali - Esercizi Risolti PDFAnnaBarlettaNo ratings yet
- Esercizi Di Meccanica AnaliticaDocument38 pagesEsercizi Di Meccanica AnaliticaYenNo ratings yet
- 3 Algebra Disequazioni AlgebricheDocument47 pages3 Algebra Disequazioni AlgebrichebertrandNo ratings yet
- A.picardello - Analisi Armonica Aspetti Classici e NumericiDocument1,355 pagesA.picardello - Analisi Armonica Aspetti Classici e NumericiDæveNo ratings yet
- Meccanica Razionale EserciziDocument248 pagesMeccanica Razionale EserciziPepNo ratings yet
- Esercitazioni IdraulicaDocument61 pagesEsercitazioni IdraulicagioioNo ratings yet
- Corso Di Meccanica Applicata Alle Macchine - Alessandro Rivola - (Ingegn Meccanica&Aerospaziale Univ Bologna - Aa 2005-2006 - PP 76) PDFDocument74 pagesCorso Di Meccanica Applicata Alle Macchine - Alessandro Rivola - (Ingegn Meccanica&Aerospaziale Univ Bologna - Aa 2005-2006 - PP 76) PDFamjr1001No ratings yet
- Fisica Nucleare e SubnucleareDocument98 pagesFisica Nucleare e Subnuclearenicolafratianni100% (1)
- Appunti Lezioni Analisi Matematica 1Document92 pagesAppunti Lezioni Analisi Matematica 1sandrognolo5178100% (1)
- Appunti Di Gasdinamica - M. GermanoDocument107 pagesAppunti Di Gasdinamica - M. GermanolukeskwNo ratings yet
- Ariete Michaud AllieviDocument1 pageAriete Michaud Allievibefana63No ratings yet
- Teoria Ed Esercizi Fondamenti Di MacchineDocument39 pagesTeoria Ed Esercizi Fondamenti Di MacchinePastoreNo ratings yet
- Aerodinamica Degli Aeromotori - Parte1Document48 pagesAerodinamica Degli Aeromotori - Parte1Federico BorrelliNo ratings yet
- Diagrammi Di BodeDocument30 pagesDiagrammi Di BodeElisabetta BrunoNo ratings yet
- Applicazione Del Teorema Di TheveninDocument4 pagesApplicazione Del Teorema Di TheveninAlka389No ratings yet
- Esercizi MeccAppDocument51 pagesEsercizi MeccAppPaoloMaccaronioNo ratings yet
- Trasmissione Del Calore - Convezione PDFDocument58 pagesTrasmissione Del Calore - Convezione PDFrobbui80100% (2)
- Costruzioni Aerospaziali Esercizi e DimostrazioniDocument77 pagesCostruzioni Aerospaziali Esercizi e DimostrazioniCesare AngeliNo ratings yet
- Dispense Avanzini MeccanicaDocument209 pagesDispense Avanzini MeccanicafrfrfrfrfrfNo ratings yet
- TDEconsoluzioneDocument56 pagesTDEconsoluzioneAnonymous lWOc6gNo ratings yet
- Spazi Affini (Ciliberto)Document111 pagesSpazi Affini (Ciliberto)R.PercacciNo ratings yet
- Esercizio Aerotecnica 1Document1 pageEsercizio Aerotecnica 1proxymo1No ratings yet
- Processi Di Levy in FinanzaDocument47 pagesProcessi Di Levy in FinanzapopperlandNo ratings yet
- Pid e Anti WindupDocument26 pagesPid e Anti WindupMarco Scaglione100% (1)
- Appunti - Di - Geometria Paola Biondi - PIA Maria Lo ReDocument208 pagesAppunti - Di - Geometria Paola Biondi - PIA Maria Lo ReMarina ZuddasNo ratings yet
- Esercitazioni Di Meccanica RazionaleDocument60 pagesEsercitazioni Di Meccanica RazionalemlouredocasadoNo ratings yet
- Esercizi di matematica: equazioni differenziali a derivate parzialiFrom EverandEsercizi di matematica: equazioni differenziali a derivate parzialiRating: 5 out of 5 stars5/5 (1)
- Esercizi di matematica: calcolo tensorialeFrom EverandEsercizi di matematica: calcolo tensorialeRating: 5 out of 5 stars5/5 (1)
- ElicotteroDocument65 pagesElicotteroaerologik_347746151No ratings yet
- Manuale Dell'elicottero RCDocument46 pagesManuale Dell'elicottero RCClara MetisNo ratings yet
- Aeroplano e Le Sue Parti 2Document16 pagesAeroplano e Le Sue Parti 2proxymo1No ratings yet
- Luc CA 12 Diagrammi Di BodeDocument17 pagesLuc CA 12 Diagrammi Di BodeDavide MaranoNo ratings yet
- 8-Caratterizzazione Meccanica Dei CompositiDocument118 pages8-Caratterizzazione Meccanica Dei CompositiVincent CucumazzøNo ratings yet
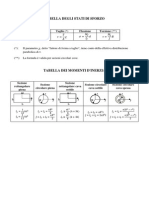
- Tabelle Stati Di Sforzo e Momenti D'inerziaDocument1 pageTabelle Stati Di Sforzo e Momenti D'inerziaMa RcoNo ratings yet
- Analisi Teorica e Sperimentale Del Rendimento Di Riduttori EpicicloidaliDocument27 pagesAnalisi Teorica e Sperimentale Del Rendimento Di Riduttori Epicicloidalidon-donnolaNo ratings yet
- 10 RugositaDocument7 pages10 RugositadosocadNo ratings yet
- Schema Elettrico RSVDocument1 pageSchema Elettrico RSVdon-donnolaNo ratings yet
- Tolleranze AccoppiamentiDocument34 pagesTolleranze Accoppiamentidon-donnolaNo ratings yet
- Cambio Raceup MilanoDocument73 pagesCambio Raceup Milanodon-donnolaNo ratings yet
- DSV-DQV Quaderno 2Document19 pagesDSV-DQV Quaderno 2don-donnolaNo ratings yet
- Nuova Direttiva Macchine 2006 42 CeDocument63 pagesNuova Direttiva Macchine 2006 42 CeemazedNo ratings yet
- 701 Dispense LaboratorioDocument84 pages701 Dispense Laboratoriodon-donnolaNo ratings yet
- Hiwin - Guide e PattiniDocument154 pagesHiwin - Guide e Pattinidon-donnolaNo ratings yet
- 13 MonteCarloDocument8 pages13 MonteCarlodon-donnolaNo ratings yet
- Motoriduttori Riduttori Vite Senza Fine CHMDocument31 pagesMotoriduttori Riduttori Vite Senza Fine CHMdon-donnolaNo ratings yet
- 34223-Unioni Bullonate A TaglioDocument10 pages34223-Unioni Bullonate A Tagliodon-donnolaNo ratings yet
- IrrigatoriDocument0 pagesIrrigatoridon-donnolaNo ratings yet
- D Lgs 17 Direttiva MacchineDocument74 pagesD Lgs 17 Direttiva MacchineMatteo PeddisNo ratings yet
- Criteri Voto Laurea Magistrale Ingegneria PadovaDocument2 pagesCriteri Voto Laurea Magistrale Ingegneria Padovadon-donnolaNo ratings yet
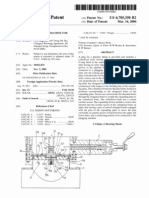
- Us 6705350Document12 pagesUs 6705350don-donnolaNo ratings yet
- T5-Catalogo Tecnico CALETTATORI Conici 2009Document20 pagesT5-Catalogo Tecnico CALETTATORI Conici 2009don-donnolaNo ratings yet
- Verifica RecipientiDocument26 pagesVerifica RecipientiAlessio DimastrogiovanniNo ratings yet
- Bulloni DadiDocument2 pagesBulloni DadiClaudio PaganiNo ratings yet
- 06b Turbine A VaporeDocument76 pages06b Turbine A Vaporedon-donnolaNo ratings yet
- Ebook Ingegneria Ita Appunti Del Corso Di Metodi Matematici Per L Ingegneria 204 PagDocument204 pagesEbook Ingegneria Ita Appunti Del Corso Di Metodi Matematici Per L Ingegneria 204 PagantoninoxxxNo ratings yet
- Acciaio Uni en 10027Document3 pagesAcciaio Uni en 10027lavius_mNo ratings yet
- FlussaggioDocument19 pagesFlussaggioEleonora GalloNo ratings yet
- Formulario Fisica 1Document15 pagesFormulario Fisica 1Davide RaimoNo ratings yet
- Dispense Meccanica Delle StruttureDocument43 pagesDispense Meccanica Delle StruttureFrancesca SartiniNo ratings yet
- Elementi Di Cinematica e Dinamica Della MotociclettaDocument160 pagesElementi Di Cinematica e Dinamica Della MotociclettaPaoloNo ratings yet
- (Ingegneria) Meccanica - Razionale - A - Teoria PDFDocument166 pages(Ingegneria) Meccanica - Razionale - A - Teoria PDFEnrico Iodice100% (1)
- Programma Fisica 1Document2 pagesProgramma Fisica 1Luca Di BariNo ratings yet
- Appunti Di Scienza Delle Costruzioni UninaStidueNetDocument601 pagesAppunti Di Scienza Delle Costruzioni UninaStidueNetleirbag88No ratings yet
- Fondamenti Di Meccanica Strutturale Curti Curagrave PDFDocument196 pagesFondamenti Di Meccanica Strutturale Curti Curagrave PDFMaurizio BertoldoNo ratings yet
- Scheda Trasparenza 148522Document4 pagesScheda Trasparenza 148522gigiNo ratings yet
- (Ebook - Aero) - Elementi Di Meccanica Del Volo Vol 1 (La Sapienza)Document106 pages(Ebook - Aero) - Elementi Di Meccanica Del Volo Vol 1 (La Sapienza)ingmbNo ratings yet
- Meccanica Razionale - Alberto StrumiaDocument976 pagesMeccanica Razionale - Alberto StrumiaFrancesco Bacchini100% (2)
- Manuale Di Automazione IndustrialeDocument137 pagesManuale Di Automazione IndustrialeOrtensia Del LagoNo ratings yet
- Pendolo Di KaterDocument2 pagesPendolo Di Katerdomenico123No ratings yet
- Appunti FisicaDocument8 pagesAppunti Fisicalolloso22caNo ratings yet
- 50 Esempi Di PROBLEMIDocument21 pages50 Esempi Di PROBLEMIGiovanni Di MeglioNo ratings yet
- Statica Del Punto Materiale e Del Corpo RigidoDocument20 pagesStatica Del Punto Materiale e Del Corpo RigidoAlessio ScarabelliNo ratings yet
- Esercizi Di Fisica Con SoluzioniDocument124 pagesEsercizi Di Fisica Con SoluzioniAlessandro VidaleNo ratings yet
- Programma Meccanica Razionale PDFDocument3 pagesProgramma Meccanica Razionale PDFMarioNo ratings yet
- Aval Fisica 1Document3 pagesAval Fisica 1Jucilia MariaNo ratings yet
- 05-Cinematica TraviDocument12 pages05-Cinematica TraviMilena CiamarraNo ratings yet
- (Ingegneria - Ebook) Jacazio-Piombo - (Meccanica Applicata Alle Macchine) Vol 1-OCR-2Document143 pages(Ingegneria - Ebook) Jacazio-Piombo - (Meccanica Applicata Alle Macchine) Vol 1-OCR-2anderNo ratings yet
- Meccanica Razionale EserciziDocument248 pagesMeccanica Razionale EsercizileonelNo ratings yet
- Meccanica Razionale EserciziDocument248 pagesMeccanica Razionale EserciziPepNo ratings yet
- Anzalone, Bassignana, Musicoro - Fondamenti Di Meccanica e Macchine PDFDocument38 pagesAnzalone, Bassignana, Musicoro - Fondamenti Di Meccanica e Macchine PDFLeo NardoNo ratings yet
- Lezione 1 - Moto UnidimensionaleDocument106 pagesLezione 1 - Moto UnidimensionalenonlosoNo ratings yet
- Appunti Fisica Biennio ITIDocument50 pagesAppunti Fisica Biennio ITIEugenia DantonioNo ratings yet
- Appunti 2007 - Meccanica Razionale Per L'ingegneria MuracchiniDocument55 pagesAppunti 2007 - Meccanica Razionale Per L'ingegneria MuracchiniLuca LatiniNo ratings yet
- Meccanica StruttureDocument85 pagesMeccanica StruttureCARMELONo ratings yet
- Lezione 15 PDFDocument36 pagesLezione 15 PDFAnonymous QRUEIaNo ratings yet