You might also like
- Presentation Overhung FansDocument104 pagesPresentation Overhung FansKarthik Vk100% (1)
- Vib Software OmnitrendDocument2 pagesVib Software Omnitrendabel100% (1)
- Understand Vibration Analysis Training in 40 CharactersDocument6 pagesUnderstand Vibration Analysis Training in 40 CharacterscesarNo ratings yet
- Vibxpert Manual English PDFDocument86 pagesVibxpert Manual English PDFRizki A-fNo ratings yet
- Understanding Unbalance in Rotating EquipmentDocument27 pagesUnderstanding Unbalance in Rotating EquipmentNaveen ChodagiriNo ratings yet
- Velocity Severity Velocity Range Limits and Machine Classes ISO Standard 10816-1Document1 pageVelocity Severity Velocity Range Limits and Machine Classes ISO Standard 10816-1Karthik VkNo ratings yet
- Cutting Speed OptimizationDocument14 pagesCutting Speed OptimizationCharles OndiekiNo ratings yet
- Sleeve Bearing Diagnostics R1Document75 pagesSleeve Bearing Diagnostics R1Daniel_Ali_bNo ratings yet
- Vibration Sources Identification GuideDocument1 pageVibration Sources Identification GuideDTNgoNo ratings yet
- Basic Vibration Training For Engro EnergyDocument70 pagesBasic Vibration Training For Engro EnergyHesham IbrahemNo ratings yet
- Advance VibrationDocument263 pagesAdvance VibrationSurya Pratap SinghNo ratings yet
- Ultrasound For Slow Speed Bearing Monitoring - RonTangen PDFDocument67 pagesUltrasound For Slow Speed Bearing Monitoring - RonTangen PDFaabejaroNo ratings yet
- Alignment TrainingDocument59 pagesAlignment TrainingNasrul100% (1)
- Design of Transmission Systems: Belt and Chain Drives ExplainedDocument56 pagesDesign of Transmission Systems: Belt and Chain Drives ExplainedgowthamkuttiNo ratings yet
- Omni Trend Getting StartedDocument32 pagesOmni Trend Getting Startedtgrtrtqwreyt0% (1)
- ISO 18436-2 Vibration Analysis CertificationDocument1 pageISO 18436-2 Vibration Analysis CertificationNovindra PutraNo ratings yet
- Introduction To PeakvueDocument55 pagesIntroduction To PeakvuesebastianNo ratings yet
- Installation and Introduction PDFDocument39 pagesInstallation and Introduction PDFOscar Daga CaravantesNo ratings yet
- ILearnReliability - Professional DevelopmentDocument5 pagesILearnReliability - Professional DevelopmentsalyNo ratings yet
- Basics of vibration analysis and condition monitoringDocument28 pagesBasics of vibration analysis and condition monitoringMohammad Zainullah KhanNo ratings yet
- Tabla Charlotte - 1Document53 pagesTabla Charlotte - 1Jose G Lopez100% (3)
- VACUUM PUMP DIAGNOSIS (Overall V Spectrum) - Case - Study - 10Document1 pageVACUUM PUMP DIAGNOSIS (Overall V Spectrum) - Case - Study - 10ho-faNo ratings yet
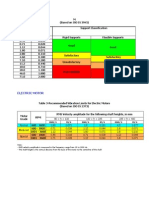
- Electric Motor: Satisfactory UnsatisfactoryDocument2 pagesElectric Motor: Satisfactory UnsatisfactoryZuli HarismanNo ratings yet
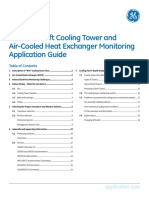
- Vibration Severity Guide for Machinery DiagnosticsDocument1 pageVibration Severity Guide for Machinery DiagnosticsalxmaasNo ratings yet
- Vibration PDFDocument74 pagesVibration PDFshobhan1984No ratings yet
- VIBXPERT II Balancing Manual en 052012Document46 pagesVIBXPERT II Balancing Manual en 052012luismariogallego50% (2)
- Case Studies #4: Gearbox DefectDocument13 pagesCase Studies #4: Gearbox DefectMiguel VillegasNo ratings yet
- ISO Vibration Analysis Certification Exam Cat I Part 3 Signal Processing Ali M Al-Shurafa PDFDocument1 pageISO Vibration Analysis Certification Exam Cat I Part 3 Signal Processing Ali M Al-Shurafa PDFMohammed Kamel TonyNo ratings yet
- Vibration Institute - Basics of OCM PDFDocument39 pagesVibration Institute - Basics of OCM PDFenny setianyNo ratings yet
- VIB Booklet ENDocument36 pagesVIB Booklet ENPetra HeutsNo ratings yet
- Monitoring and Analysis of Machine VibrationDocument6 pagesMonitoring and Analysis of Machine VibrationAvinashNo ratings yet
- ISO Vibration Analysis Certification Exam Cat I Part 3 Signal Processing Ali M Al-ShurafaDocument1 pageISO Vibration Analysis Certification Exam Cat I Part 3 Signal Processing Ali M Al-ShurafaMohammed Kamel Tony100% (1)
- Advanced Vibration AnalysisDocument24 pagesAdvanced Vibration AnalysisM Hamza NadeemNo ratings yet
- CM3141 en Bump Test ModuleDocument2 pagesCM3141 en Bump Test ModuleLuisSilvaNo ratings yet
- 10 Components of A Successful Vibration Program 2Document5 pages10 Components of A Successful Vibration Program 2allmcbeallNo ratings yet
- How To Bump Test With MicrologDocument2 pagesHow To Bump Test With MicrologYuda SatriaNo ratings yet
- Ams Machinery Manager v5 71 Installation Guide en 4236422 PDFDocument68 pagesAms Machinery Manager v5 71 Installation Guide en 4236422 PDFgspozoNo ratings yet
- STI Field Application Note: Acceleration EnvelopingDocument2 pagesSTI Field Application Note: Acceleration Envelopingsalkan_rahmanovic810No ratings yet
- Vibration Analysis of Rolling BearingsDocument99 pagesVibration Analysis of Rolling BearingsDaniel_Ali_bNo ratings yet
- Why Vibration Monitoring is Important for Condition Based MaintenanceDocument15 pagesWhy Vibration Monitoring is Important for Condition Based MaintenanceAdi FirmantoNo ratings yet
- Vibration LimitsDocument37 pagesVibration LimitssanketNo ratings yet
- Vibration Analysis GuideDocument26 pagesVibration Analysis GuideronfrendNo ratings yet
- Vibration MonitoringDocument67 pagesVibration MonitoringApurv Khandelwal100% (4)
- AMS Suite: Machinery Health Manager Data & MonitoringDocument39 pagesAMS Suite: Machinery Health Manager Data & MonitoringrharaksiNo ratings yet
- Advanced Vibration Analysis TechniquesDocument324 pagesAdvanced Vibration Analysis Techniquesharikrishnanpd3327No ratings yet
- Nota Tecnica OmnitrendDocument4 pagesNota Tecnica OmnitrendAlejandro Jimenez FuentesNo ratings yet
- Vibration SensorsDocument93 pagesVibration Sensorsthai huynh leNo ratings yet
- Using Time WaveformDocument5 pagesUsing Time WaveformfranksuaiNo ratings yet
- Minimac - ProfileDocument40 pagesMinimac - ProfileAnshuman AgrawalNo ratings yet
- Vibration and Monitoring Terms GlossaryDocument12 pagesVibration and Monitoring Terms Glossaryyaniprasetyo12No ratings yet
- Timebase Plots ExplainedDocument18 pagesTimebase Plots ExplainedManuel L LombarderoNo ratings yet
- Low Speed Fans Application Guide MiningDocument20 pagesLow Speed Fans Application Guide MiningsanthoshdonNo ratings yet
- Structural Health MonitoringFrom EverandStructural Health MonitoringDaniel BalageasNo ratings yet
- Rolamento Vibration AnalysisDocument153 pagesRolamento Vibration AnalysisReginaldoVieiradaSilva100% (1)
- Introduction To Basic Vibration AnalysisDocument162 pagesIntroduction To Basic Vibration AnalysisΡαφαηλ Καμ.100% (2)
- Beginning Vibration Analysis FundamentalsDocument96 pagesBeginning Vibration Analysis FundamentalsBarcsa RudolfNo ratings yet
- Beginning Vibration Analysis FundamentalsDocument96 pagesBeginning Vibration Analysis FundamentalsromadhinhoNo ratings yet
- Application Note #1: About FFT Spectrum AnalyzersDocument6 pagesApplication Note #1: About FFT Spectrum AnalyzersJr-Gon HouNo ratings yet
- About FFT Spectrum Analyzers: Application Note #1Document7 pagesAbout FFT Spectrum Analyzers: Application Note #1Eric DharanNo ratings yet
- Introduction To PeakvueDocument55 pagesIntroduction To PeakvueAhmed Nazeem100% (4)
- Numatics Valve TrainingDocument57 pagesNumatics Valve TrainingRaymond EsmeraldaNo ratings yet
- CircuitsDocument14 pagesCircuitsAnonymous ffje1rpaNo ratings yet
- NPSHDocument7 pagesNPSHsateesh chandNo ratings yet
- Presentacion IlearnDocument38 pagesPresentacion IlearnAnonymous ffje1rpaNo ratings yet
- Balancing: One Plane/two PlanesDocument19 pagesBalancing: One Plane/two PlanesAnonymous ffje1rpaNo ratings yet
- Additel 918 ManualDocument2 pagesAdditel 918 ManualAnonymous ffje1rpaNo ratings yet
- Parker Solenoid Valve Technical DataDocument2 pagesParker Solenoid Valve Technical DataAnonymous ffje1rpaNo ratings yet
- AMRI ISORIA 10 Type Series Booklet Data PDFDocument20 pagesAMRI ISORIA 10 Type Series Booklet Data PDFMurrali Raj Jeyagapal50% (2)
- Fluke Pressure CalibratorDocument1 pageFluke Pressure CalibratorAnonymous ffje1rpaNo ratings yet
- GOSeDocument9 pagesGOSeAnonymous ffje1rpaNo ratings yet
- C1 Compressor: Plant CharleroiDocument9 pagesC1 Compressor: Plant CharleroiAnonymous ffje1rpaNo ratings yet
- THDRTDocument20 pagesTHDRTAnonymous ffje1rpaNo ratings yet
- Shaft Alignment: Nizwa College of TechnologyDocument15 pagesShaft Alignment: Nizwa College of TechnologyAnonymous ffje1rpaNo ratings yet
- Acid Cleaner Life ExtensionDocument33 pagesAcid Cleaner Life ExtensionAnonymous ffje1rpaNo ratings yet
- Advanced NDT 2Document56 pagesAdvanced NDT 2Anonymous ffje1rpa83% (6)
- HR-4050 Emp. Recog. & Awards ProgramDocument2 pagesHR-4050 Emp. Recog. & Awards ProgramAnonymous ffje1rpaNo ratings yet
- Chapter 1 Ref CyclesDocument31 pagesChapter 1 Ref CyclesAnonymous ffje1rpaNo ratings yet
- Cooler Drain LocationDocument1 pageCooler Drain LocationAnonymous ffje1rpaNo ratings yet
- Journal BearingsDocument23 pagesJournal BearingsAnonymous ffje1rpa100% (1)
- Air SeparatorsDocument28 pagesAir SeparatorsAnonymous ffje1rpaNo ratings yet
- 4.hydrogen Generator System and FunctionsDocument4 pages4.hydrogen Generator System and FunctionsAnonymous ffje1rpaNo ratings yet
- Equipment Specifications PDFDocument10 pagesEquipment Specifications PDFJ.SIVIRANo ratings yet
- Sadat City Factories List 2009Document39 pagesSadat City Factories List 2009Anonymous ffje1rpaNo ratings yet
- Aps Loto Sample 2014Document4 pagesAps Loto Sample 2014Anonymous ffje1rpaNo ratings yet
- Oxygen Gas Feasibility StudyDocument36 pagesOxygen Gas Feasibility StudyGhulam Abbas100% (1)
- Detail WI Online TestingDocument9 pagesDetail WI Online TestingAnonymous ffje1rpaNo ratings yet
- Ed 021094Document19 pagesEd 021094Anonymous ffje1rpaNo ratings yet
- RELIEF VALVE TEST PROCEDUREDocument30 pagesRELIEF VALVE TEST PROCEDUREAnonymous ffje1rpa100% (1)
- Basic-Concepts MTBFDocument15 pagesBasic-Concepts MTBFAnonymous ffje1rpaNo ratings yet
- Endothermic Reactions Absorb HeatDocument2 pagesEndothermic Reactions Absorb HeatRista WaniNo ratings yet
- What Is Altimetry 1Document1 pageWhat Is Altimetry 1miguel rosasNo ratings yet
- Top 10 Windows Firewall Netsh CommandsDocument4 pagesTop 10 Windows Firewall Netsh CommandsedsoncalleNo ratings yet
- Web Intelligence XI 3.0 Parameter GuideDocument10 pagesWeb Intelligence XI 3.0 Parameter GuideJaime Andrés Triviño Sánchez0% (1)
- Nob Tool CatalogueDocument2 pagesNob Tool CatalogueFoton y JacNo ratings yet
- Managing Economies of Scale in Supply ChainsDocument25 pagesManaging Economies of Scale in Supply ChainsWei JunNo ratings yet
- Quizlet-Philippine Electrical CodeDocument2 pagesQuizlet-Philippine Electrical Codena zafira0% (1)
- Massive Transfusion ProtocolDocument2 pagesMassive Transfusion ProtocolmukriNo ratings yet
- The Tom Bearden Website-StupidityDocument7 pagesThe Tom Bearden Website-StupiditybestiariosNo ratings yet
- 913-2174-01 - Ibypass VHD User Guide Version 1.5 - Revh - VanphDocument218 pages913-2174-01 - Ibypass VHD User Guide Version 1.5 - Revh - Vanphpham hai van100% (1)
- What Is Radar and Its FunctionDocument3 pagesWhat Is Radar and Its FunctionJean Maya DiscayaNo ratings yet
- Kotlin Programs - StudentsDocument74 pagesKotlin Programs - Studentsgandem gowhithNo ratings yet
- Kalman Filter Tutorial - PresentationDocument65 pagesKalman Filter Tutorial - Presentationcarlazar100% (2)
- Introducing Congestion Avoidance: Implement The Diffserv Qos ModelDocument39 pagesIntroducing Congestion Avoidance: Implement The Diffserv Qos ModelrajkumarlodhNo ratings yet
- SAP Table BufferingDocument31 pagesSAP Table Bufferingashok_oleti100% (3)
- M.SC - Physics 3rd Sem FinalDocument12 pagesM.SC - Physics 3rd Sem FinalKhileswar ChandiNo ratings yet
- Math Let Reviewer 44 Analytic GeometryDocument3 pagesMath Let Reviewer 44 Analytic Geometryjohn johnNo ratings yet
- CE 308 Plain and Reinforced Concrete - Ii Determination of Size, Spacing and Cover in Reinforced Concrete Slab by Cover MeterDocument9 pagesCE 308 Plain and Reinforced Concrete - Ii Determination of Size, Spacing and Cover in Reinforced Concrete Slab by Cover MeterumairNo ratings yet
- Irfp4768Pbf: Application V 250V R 14.5M 17.5M I 93ADocument9 pagesIrfp4768Pbf: Application V 250V R 14.5M 17.5M I 93AKrishna InamdarNo ratings yet
- Ground Plane AntennaDocument7 pagesGround Plane AntennaarijeetdguyNo ratings yet
- VPRS-4300D Catalogue PDFDocument4 pagesVPRS-4300D Catalogue PDFHoàngTrầnNo ratings yet
- Assignment No.3 Bolted JointsDocument6 pagesAssignment No.3 Bolted JointsYash SahuNo ratings yet
- POWER Nav1 - MIDTERM - Topic 1 & 2Document31 pagesPOWER Nav1 - MIDTERM - Topic 1 & 2CLIJOHN PABLO FORD100% (1)
- SCADADocument14 pagesSCADANunna BaskarNo ratings yet
- State-Of-The-Art CFB Technology For Utility-Scale Biomass Power PlantsDocument10 pagesState-Of-The-Art CFB Technology For Utility-Scale Biomass Power PlantsIrfan OmercausevicNo ratings yet
- MetaLINK Info r456Document5 pagesMetaLINK Info r456Milan AntovicNo ratings yet
- E8244 Ahu Catalogue 2014 PDFDocument174 pagesE8244 Ahu Catalogue 2014 PDFmurugesanNo ratings yet
- Danfossirv 302Document46 pagesDanfossirv 302FabricioPexNo ratings yet
- EECIM01 Course MaterialDocument90 pagesEECIM01 Course Materialsmahesh_1980No ratings yet
- Is 15894-2018Document25 pagesIs 15894-2018surender kumarNo ratings yet