You might also like
- Modulation Techniques in Inverters: Advanced Power Electronics and Applications ECEG 6309Document44 pagesModulation Techniques in Inverters: Advanced Power Electronics and Applications ECEG 6309Meng FenNo ratings yet
- Induction MotorsDocument81 pagesInduction MotorsIdhamtanahbaruNo ratings yet
- Design of Passive Harmonic FiltersDocument8 pagesDesign of Passive Harmonic FiltersAnton MatzNo ratings yet
- Sensored Field Oriented Control of A Permanent Magnet Synchronous Motor (PMSM)Document35 pagesSensored Field Oriented Control of A Permanent Magnet Synchronous Motor (PMSM)Muhammad Waseem AnwarNo ratings yet
- Mipower PDFDocument11 pagesMipower PDFM.KNo ratings yet
- Dspace MicroLabBoxDocument12 pagesDspace MicroLabBoxCatalin NacuNo ratings yet
- Today: Inverter + PMSM Control: 3 Phase Inverter (DC To AC) 3 Phase Electric MachineDocument29 pagesToday: Inverter + PMSM Control: 3 Phase Inverter (DC To AC) 3 Phase Electric Machineciprian167No ratings yet
- SWPE05 - EN - PSS E - Short Circuit Calculations - S4 PDFDocument2 pagesSWPE05 - EN - PSS E - Short Circuit Calculations - S4 PDFLUCAS ADOLFONo ratings yet
- Dealing With IGBT ModulesDocument72 pagesDealing With IGBT ModulesBatuhan IzmırlıNo ratings yet
- Alternators Connected To Infinite Bus BarDocument9 pagesAlternators Connected To Infinite Bus BarbharatkNo ratings yet
- LCL Filter DesignDocument11 pagesLCL Filter DesignQawl TayebNo ratings yet
- (VT Ranganathan) Course Notes On Electric DrivesDocument119 pages(VT Ranganathan) Course Notes On Electric DrivesPowerranger2.0No ratings yet
- Motor Design Suite V12Document60 pagesMotor Design Suite V12Trần Trung HiếuNo ratings yet
- Computer Simulation of HV Circuit Breaker Interruption - EnergoBos ILJIN July 2017Document26 pagesComputer Simulation of HV Circuit Breaker Interruption - EnergoBos ILJIN July 2017Amer SmajkićNo ratings yet
- Direct Torque Control InductionDocument9 pagesDirect Torque Control InductiononafetsNo ratings yet
- 10 kW Inverter Design for Fuel Cell SystemDocument52 pages10 kW Inverter Design for Fuel Cell Systemguddu13481No ratings yet
- Single-Tuned Filter Design For Harmonic Mitigation and Optimization With Capacitor BanksDocument7 pagesSingle-Tuned Filter Design For Harmonic Mitigation and Optimization With Capacitor BanksNelson ParijósNo ratings yet
- Dynamic Analysis of IEEE 14 Bus System: Experiment No: 05Document8 pagesDynamic Analysis of IEEE 14 Bus System: Experiment No: 05apsmadNo ratings yet
- PF Improvement On DG SetsDocument8 pagesPF Improvement On DG SetsAnupam SharmaNo ratings yet
- AC Voltage Contoller Circuits by MMRDocument124 pagesAC Voltage Contoller Circuits by MMRananthashyam201No ratings yet
- SPEED Electric Machines BrochureDocument8 pagesSPEED Electric Machines Brochure张之政No ratings yet
- PMSM 2012Document62 pagesPMSM 2012Sreerag Kunnathu Sugathan100% (3)
- DC to DC Converter FundamentalsDocument40 pagesDC to DC Converter FundamentalsJamir CalNo ratings yet
- Electrical SteelDocument193 pagesElectrical SteelpavanupadhyeNo ratings yet
- Acs 5000 BrochureDocument24 pagesAcs 5000 BrochureRagilNo ratings yet
- Traction Substation - Magus PDFDocument2 pagesTraction Substation - Magus PDFNima MahmoudpourNo ratings yet
- 12 Pulse Rectifier PDFDocument8 pages12 Pulse Rectifier PDFBhanu ThestarNo ratings yet
- M.tech Lab Manual - PSSDocument33 pagesM.tech Lab Manual - PSSsuresh270No ratings yet
- Tutorial: Harmonic AnalysisDocument9 pagesTutorial: Harmonic AnalysisOmar ChacónNo ratings yet
- PSCAD Users Guide V4.2Document560 pagesPSCAD Users Guide V4.2Akshay Kumar100% (1)
- PExprt v71 L01 IntroductionDocument26 pagesPExprt v71 L01 IntroductionEdwin C. Abregú100% (2)
- Solution Handbook: Harmonic MitigationDocument40 pagesSolution Handbook: Harmonic MitigationAngela TienNo ratings yet
- Etap Validation Cases and Comparison Results: Load FlowDocument66 pagesEtap Validation Cases and Comparison Results: Load FlowK.RamachandranNo ratings yet
- Calculation - Method - ULF Unbalanced Load Flow ETAP PDFDocument8 pagesCalculation - Method - ULF Unbalanced Load Flow ETAP PDFZulqibalNo ratings yet
- Fundamentals of Electrical Drives - G. K. Dubey PDFDocument121 pagesFundamentals of Electrical Drives - G. K. Dubey PDFAnonymous l7YZBdNo ratings yet
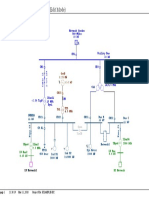
- One-Line Diagram - Study View (Edit Mode) : Network Feeder 500 Mvasc 33 KV Network Feeder 500 Mvasc 33 KVDocument1 pageOne-Line Diagram - Study View (Edit Mode) : Network Feeder 500 Mvasc 33 KV Network Feeder 500 Mvasc 33 KVBhavik PrajapatiNo ratings yet
- Tms 320 F 28379 DDocument222 pagesTms 320 F 28379 DJuan Ku LosanoNo ratings yet
- BIDRAM - MPPT Shading Review PDFDocument15 pagesBIDRAM - MPPT Shading Review PDFGeyciane PinheiroNo ratings yet
- EV Charger - Application NoteDocument4 pagesEV Charger - Application Noteமுருகன்No ratings yet
- Lecture 07 - Synchronous MachinesDocument98 pagesLecture 07 - Synchronous Machinesramkiran1989100% (1)
- DC - AC Converter - eDocument14 pagesDC - AC Converter - ebishnu prasad muniNo ratings yet
- Pulse-Width Modulation (PWM) TechniquesDocument14 pagesPulse-Width Modulation (PWM) TechniquesMohamed SalahNo ratings yet
- Pulse-Width Modulation (PWM) Techniques: Instructor: Prof. Ali KeyhaniDocument35 pagesPulse-Width Modulation (PWM) Techniques: Instructor: Prof. Ali KeyhaniSurajDashNo ratings yet
- DC - AC Converter - DDocument30 pagesDC - AC Converter - Dbishnu prasad muniNo ratings yet
- Pulse-Width Modulation Techniques for Voltage Source InvertersDocument35 pagesPulse-Width Modulation Techniques for Voltage Source InvertersLuis Enrique Garduño LandazuriNo ratings yet
- Harmonic Analysis of Different PWM Techniques Used in InverterDocument18 pagesHarmonic Analysis of Different PWM Techniques Used in InverterKedar PatilNo ratings yet
- Voltage Control Methods: External Control of InverterDocument45 pagesVoltage Control Methods: External Control of InverterTeja VaitlaNo ratings yet
- PEDocument35 pagesPEsivaNo ratings yet
- Comparative Analysis of Harmonic Reduction of VSI Fed Induction Motor Using SVPWM and Sinusoidal PWMDocument5 pagesComparative Analysis of Harmonic Reduction of VSI Fed Induction Motor Using SVPWM and Sinusoidal PWMSaumitriNo ratings yet
- PWM Inverters ExplainedDocument25 pagesPWM Inverters Explainedسجاد عباسNo ratings yet
- Two-Level VSI TechniquesDocument7 pagesTwo-Level VSI TechniquesAbhijith TeekayNo ratings yet
- Three Phase Voltage Source InverterDocument6 pagesThree Phase Voltage Source InverterLubaba Bashar MomiNo ratings yet
- Ee366 Chap 5 4Document19 pagesEe366 Chap 5 4Michael Adu-boahenNo ratings yet
- Indira Gandhi Institute of Technology Sarang-759146, Dhenkanal, OrissaDocument18 pagesIndira Gandhi Institute of Technology Sarang-759146, Dhenkanal, OrissasatyadeepakNo ratings yet
- A New ISPWM Switching Technique For THD Reduction in Custom Power DevicesDocument7 pagesA New ISPWM Switching Technique For THD Reduction in Custom Power DevicesBharathkumars89No ratings yet
- Selective Harmonic Elimination by Programmable Pulse Width Modulation in InvertersDocument6 pagesSelective Harmonic Elimination by Programmable Pulse Width Modulation in InvertersseventhsensegroupNo ratings yet
- Single Phase Bridge VSIDocument13 pagesSingle Phase Bridge VSIRajesh KumarNo ratings yet
- Simulation and Comparison of SPWM and SVPWM Techniques for InvertersDocument6 pagesSimulation and Comparison of SPWM and SVPWM Techniques for InvertersIkram RidhoNo ratings yet
- Project Status Review Semester: 7 EE (Group No: 2) Project I (2170001)Document51 pagesProject Status Review Semester: 7 EE (Group No: 2) Project I (2170001)UmangNo ratings yet
- PES Lab Report 1Document22 pagesPES Lab Report 1UJJAL CHATTERJEENo ratings yet
- Submission 1 AJDocument1 pageSubmission 1 AJAkhilesh JindalNo ratings yet
- M4 PDFDocument2 pagesM4 PDFAkhilesh JindalNo ratings yet
- Difference'Document1 pageDifference'Akhilesh JindalNo ratings yet
- Low Voltage DC Circuit BreakerDocument4 pagesLow Voltage DC Circuit BreakerAkhilesh JindalNo ratings yet
- Frequency RelayDocument2 pagesFrequency RelayAkhilesh JindalNo ratings yet
- Ab 001 AbcanalysisexampleDocument3 pagesAb 001 AbcanalysisexampleAkhilesh JindalNo ratings yet
- Ab 001 AbcanalysisexampleDocument3 pagesAb 001 AbcanalysisexampleAkhilesh JindalNo ratings yet
- Seminar Presentation Electrical Power Theft Detection: Akhlesh Kumar Jindal 13085008 B.Tech. (Part-4)Document16 pagesSeminar Presentation Electrical Power Theft Detection: Akhlesh Kumar Jindal 13085008 B.Tech. (Part-4)Akhilesh JindalNo ratings yet
- Electrical Circuits & Fields MCQs from GATE 2012-2008 ChaptersDocument90 pagesElectrical Circuits & Fields MCQs from GATE 2012-2008 ChaptersAkhilesh JindalNo ratings yet
- Rotor Angle Stability Using RBFNNDocument10 pagesRotor Angle Stability Using RBFNNAkhilesh JindalNo ratings yet
- GsDocument1 pageGsAkhilesh JindalNo ratings yet
- Line Inductance EffectDocument21 pagesLine Inductance EffectAkhilesh JindalNo ratings yet
- Power System Nagrath Kothari SolutionsDocument88 pagesPower System Nagrath Kothari SolutionsChandra Sekhar Chebiyyam81% (16)
- Puregold SWOT AnalysisDocument3 pagesPuregold SWOT AnalysisRizza Mae CabigasNo ratings yet
- (SAC, BIC, XOR, LAT, AWD) On Some Cryptographic Properties of Rijndael (Yucel)Document12 pages(SAC, BIC, XOR, LAT, AWD) On Some Cryptographic Properties of Rijndael (Yucel)Alsita Putri IrianaNo ratings yet
- Certification Exam: Take A Business OnlineDocument15 pagesCertification Exam: Take A Business OnlineezerkaNo ratings yet
- Timeline of The Human SocietyDocument3 pagesTimeline of The Human SocietyAtencio Barandino JhonilNo ratings yet
- 489-F Latest JudgmentDocument15 pages489-F Latest JudgmentMoving StepNo ratings yet
- Chronic Laryngitis in CHU Yalgado Ouedraogo: Epidemiological and Diagnostic AspectsDocument4 pagesChronic Laryngitis in CHU Yalgado Ouedraogo: Epidemiological and Diagnostic AspectsMarlina ElvianaNo ratings yet
- 2004 Swamee, Prabhata K. Rathie, Pushpa N. - Exact Solutions For Normal Depth ProblemDocument9 pages2004 Swamee, Prabhata K. Rathie, Pushpa N. - Exact Solutions For Normal Depth Problemjosue.angelo9459No ratings yet
- Health Concerns of Middle-Aged Men in a Philippine JailDocument88 pagesHealth Concerns of Middle-Aged Men in a Philippine JailJelloEslaoNo ratings yet
- Soal IntroducingDocument2 pagesSoal IntroducingBibah ZulfaNo ratings yet
- Literature Review 2.1. Shodhana A. Ayurvedic System of ShodhanaDocument93 pagesLiterature Review 2.1. Shodhana A. Ayurvedic System of ShodhanasiesmannNo ratings yet
- WFISD Agenda Special SessionDocument1 pageWFISD Agenda Special SessionDenise NelsonNo ratings yet
- Fiber Optics: By: Engr. Syed Asad AliDocument20 pagesFiber Optics: By: Engr. Syed Asad Alisyedasad114No ratings yet
- Ore Pass Design and Placement Koivisto Mikko PDFDocument105 pagesOre Pass Design and Placement Koivisto Mikko PDFasepdayat100% (1)
- Aspen FLARENET Getting StartedDocument62 pagesAspen FLARENET Getting StartedAde Nurisman100% (7)
- Computerised Accounting SystemDocument14 pagesComputerised Accounting SystemramneekdadwalNo ratings yet
- Academic TranscriptDocument6 pagesAcademic Transcriptapi-450491493No ratings yet
- Student Assessment Tasks: Tasmanian State Service Senior Executive Performance Management Plan Template 1Document77 pagesStudent Assessment Tasks: Tasmanian State Service Senior Executive Performance Management Plan Template 1Imran WaheedNo ratings yet
- A Short History of CreteDocument188 pagesA Short History of CreteMilan Savić100% (1)
- Sector:: Automotive/Land Transport SectorDocument20 pagesSector:: Automotive/Land Transport SectorVedin Padilla Pedroso92% (12)
- Writing Essays B1Document6 pagesWriting Essays B1Manuel Jose Arias TabaresNo ratings yet
- Georgethirdearlo 00 WilluoftDocument396 pagesGeorgethirdearlo 00 WilluoftEric ThierryNo ratings yet
- Template For Group AssignmentDocument5 pagesTemplate For Group AssignmentIntan QamariaNo ratings yet
- Adeptia BPM Suite DatasheetDocument2 pagesAdeptia BPM Suite DatasheetadeptiaNo ratings yet
- Petitioner Respondent: Civil Service Commission, - Engr. Ali P. DaranginaDocument4 pagesPetitioner Respondent: Civil Service Commission, - Engr. Ali P. Daranginaanika fierroNo ratings yet
- LAB REPORT-Osbourne Reynolds ApparatusDocument20 pagesLAB REPORT-Osbourne Reynolds Apparatusmizizasbonkure9055% (11)
- How The Government Was Formed After Prophet MuhammadDocument48 pagesHow The Government Was Formed After Prophet MuhammadMUSALMAN BHAINo ratings yet
- Go Int 6 Unit 2 Extension TestDocument4 pagesGo Int 6 Unit 2 Extension TestMiguel Anabalón TorresNo ratings yet
- Shero Shayari by GhalibDocument65 pagesShero Shayari by GhalibEngr Muhammad Shafeeq NaqeebiNo ratings yet
- 5 Reasons To Exercise PDFReadingDocument2 pages5 Reasons To Exercise PDFReadingMỹ HàNo ratings yet
- Q1-Music 8-Thailand & LaosDocument22 pagesQ1-Music 8-Thailand & LaosYbur Hermoso-MercurioNo ratings yet