You might also like
- Example Problems 4 Master Admission ExamDocument5 pagesExample Problems 4 Master Admission ExamReddy Babu50% (2)
- PSG Tech ProfileDocument48 pagesPSG Tech ProfileReddy BabuNo ratings yet
- Smart Sensor Systems Intelligente Sensorsysteme: Univ.-Prof. Dr.-Ing. O. Kanoun Professur Für Mess-Und SensortechnikDocument22 pagesSmart Sensor Systems Intelligente Sensorsysteme: Univ.-Prof. Dr.-Ing. O. Kanoun Professur Für Mess-Und SensortechnikReddy BabuNo ratings yet
- Advanced C Training Course OutlineDocument4 pagesAdvanced C Training Course OutlineReddy BabuNo ratings yet
- About SietDocument13 pagesAbout SietReddy BabuNo ratings yet
- 3723 Lecture 18Document41 pages3723 Lecture 18Reddy BabuNo ratings yet
- C Program To Check If A Given Integer Is Odd or EvenDocument5 pagesC Program To Check If A Given Integer Is Odd or EvenReddy BabuNo ratings yet
- Implementation of A Phased Array Antenna For The 2.45 GHZ Ism BandDocument23 pagesImplementation of A Phased Array Antenna For The 2.45 GHZ Ism BandReddy BabuNo ratings yet
- Chapter - 5 - Part2 - DT Signals & SystemsDocument51 pagesChapter - 5 - Part2 - DT Signals & SystemsReddy BabuNo ratings yet
- 11 Antennas and Radiating SystemsDocument129 pages11 Antennas and Radiating SystemsSunny HaqNo ratings yet
- Linux Basics and Kernel ProgrammingDocument165 pagesLinux Basics and Kernel ProgrammingReddy BabuNo ratings yet
- 8085 Paper Presentation 1232646931472979 2Document112 pages8085 Paper Presentation 1232646931472979 2Mansi Shah ShroffNo ratings yet
- Rvs Technical Campus Rvs Faculty of Engineering COIMBATORE - 641402 Department of Electronics and Communication Engineering Laboratory NameDocument4 pagesRvs Technical Campus Rvs Faculty of Engineering COIMBATORE - 641402 Department of Electronics and Communication Engineering Laboratory NameReddy BabuNo ratings yet
- Notice: Admission I/C PrincipalDocument1 pageNotice: Admission I/C PrincipalReddy BabuNo ratings yet
- Electronic Systems Laboratory: AB BjectiveDocument5 pagesElectronic Systems Laboratory: AB BjectiveReddy BabuNo ratings yet
- An Introduction To The PIC Microcontroller: EE2801 - Lecture 19Document9 pagesAn Introduction To The PIC Microcontroller: EE2801 - Lecture 19Reddy BabuNo ratings yet
- Trade Union: "Labour Union" Redirects Here. For The Polish Political Party, See - For The Canadian Political Party, SeeDocument38 pagesTrade Union: "Labour Union" Redirects Here. For The Polish Political Party, See - For The Canadian Political Party, SeeReddy BabuNo ratings yet
- Strengthofmaterials QustionsbankDocument16 pagesStrengthofmaterials QustionsbankmichaeljemechNo ratings yet
- 6c0cacademic Schedule I Sem 2010-11 UG PGDocument2 pages6c0cacademic Schedule I Sem 2010-11 UG PGReddy BabuNo ratings yet
- For Information About Installing, Running and Configuring Firefox Including A List of Known Issues and Troubleshooting InformationDocument1 pageFor Information About Installing, Running and Configuring Firefox Including A List of Known Issues and Troubleshooting InformationReddy BabuNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- An Nb-Iot-Based Smart Trash Can System For Improved Health in Smart CitiesDocument6 pagesAn Nb-Iot-Based Smart Trash Can System For Improved Health in Smart CitiesShrivinayak DhotreNo ratings yet
- Double Smith Chart - Z & YDocument1 pageDouble Smith Chart - Z & YkgrhoadsNo ratings yet
- Power Meter With LoadDocument3 pagesPower Meter With LoadkhalidNo ratings yet
- DEC50113-Chapter 1 - 2motherboards Rev.00Document44 pagesDEC50113-Chapter 1 - 2motherboards Rev.00Zaidi RasipNo ratings yet
- Chapter 2Document10 pagesChapter 2Jomar De Honor II94% (18)
- Mod 1 DCNDocument17 pagesMod 1 DCNSUREDDY TANUJA MSCS2018No ratings yet
- Design of A New 3 Bit Flash Analog To DiDocument11 pagesDesign of A New 3 Bit Flash Analog To DisayemeeceNo ratings yet
- Computer Organizations and Architecture: by AdnanDocument23 pagesComputer Organizations and Architecture: by Adnanayyan khanNo ratings yet
- ThinkPad X1 Carbon Gen 10 DatasheetDocument4 pagesThinkPad X1 Carbon Gen 10 DatasheetAlexander MedinaNo ratings yet
- Tests Chapter 1Document20 pagesTests Chapter 109busterhNo ratings yet
- Veeam vs. Veritas Backup Exec: Quick Feature ComparisonDocument4 pagesVeeam vs. Veritas Backup Exec: Quick Feature ComparisonDai NguyenNo ratings yet
- 2d201 - 059e - D - Service Manual Data Transfer SectionDocument99 pages2d201 - 059e - D - Service Manual Data Transfer Sectionkatabalwa eric100% (1)
- Service Report: Machine SR NO./ Location Work Completed Status / Pending Work Checked by Edtv Reviewed by ManagementDocument1 pageService Report: Machine SR NO./ Location Work Completed Status / Pending Work Checked by Edtv Reviewed by ManagementSagar PawarNo ratings yet
- E45&M4 Config Protocol V1.4Document14 pagesE45&M4 Config Protocol V1.4Bac Nguyen VietNo ratings yet
- F23 HW5 v231015Document3 pagesF23 HW5 v231015Sun Li BattenNo ratings yet
- DIGIELECS1 Quiz2Document1 pageDIGIELECS1 Quiz2Jonathan DavidNo ratings yet
- Testing Procedure For DEF REL 505Document111 pagesTesting Procedure For DEF REL 505Ahmad Kalbounah0% (1)
- CS 551 Operating System Design and Implementation: Francis Leung Fall, 2009Document15 pagesCS 551 Operating System Design and Implementation: Francis Leung Fall, 2009Ravi Kumar MNo ratings yet
- Current Driver/Repeater KFD0-CS-Ex1.51P: FunctionDocument4 pagesCurrent Driver/Repeater KFD0-CS-Ex1.51P: FunctionCarlos MolinaNo ratings yet
- Computer SoftwareDocument24 pagesComputer SoftwareHalifaxNo ratings yet
- New CurriculumDocument32 pagesNew CurriculumLucky SharmaNo ratings yet
- JavaScript: The Good PartsDocument58 pagesJavaScript: The Good PartsDmytro Shteflyuk88% (8)
- Go-Global Comparison With CitrixDocument4 pagesGo-Global Comparison With Citrixgaurav_saggi1237No ratings yet
- Project ProposalDocument9 pagesProject ProposalAymen Zubair Qureshi Muhammad Zubair Asghar QureshiNo ratings yet
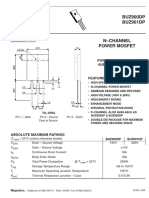
- Buz900dp Buz901dpDocument3 pagesBuz900dp Buz901dpMariaAngelicaHernandezHernandezNo ratings yet
- College Management System ProjectDocument66 pagesCollege Management System ProjectManish RajputNo ratings yet
- DSP Lectures Full SetDocument126 pagesDSP Lectures Full SetAsad JaviedNo ratings yet
- What Are The Outsourcing Options For An SME?Document4 pagesWhat Are The Outsourcing Options For An SME?quocircaNo ratings yet
- 18 Node - JsDocument28 pages18 Node - JsRahul MaruNo ratings yet
- ELEC 3300 Introduction To Embedded Systems: Topic 5Document28 pagesELEC 3300 Introduction To Embedded Systems: Topic 5Keith wongNo ratings yet