You might also like
- Chapter2 Hydraulics Control in Machine ToolsDocument67 pagesChapter2 Hydraulics Control in Machine ToolsBasha KumeraNo ratings yet
- Unit 4 61Document14 pagesUnit 4 61bhanu432No ratings yet
- Get Started With Dropbox PDFDocument10 pagesGet Started With Dropbox PDFArunkumar SeshadriNo ratings yet
- 083DSEDocument30 pages083DSEArunkumar SeshadriNo ratings yet
- E CommerceDocument11 pagesE Commerceblack90pearlNo ratings yet
- Code 2 BDocument1 pageCode 2 BArunkumar SeshadriNo ratings yet
- Quantum ComputersDocument60 pagesQuantum ComputersArunkumar SeshadriNo ratings yet
- 06961Document30 pages06961Arunkumar SeshadriNo ratings yet
- Tcs Batching ForDocument135 pagesTcs Batching ForArunkumar SeshadriNo ratings yet
- Arunaganesasn LL ComplaintDocument1 pageArunaganesasn LL ComplaintArunkumar SeshadriNo ratings yet
- JNTU World Automobile Engineering NotesDocument66 pagesJNTU World Automobile Engineering NotesArunkumar SeshadriNo ratings yet
- Cadjs CodeDocument1 pageCadjs CodeAnonymous go0H1EsrYNo ratings yet
- Models - Mph.pid ControlDocument14 pagesModels - Mph.pid ControlArunkumar SeshadriNo ratings yet
- Mass Momentum Energy ConservationDocument24 pagesMass Momentum Energy ConservationArunkumar Seshadri100% (1)
- Pressure DistributionDocument53 pagesPressure DistributionArunkumar SeshadriNo ratings yet
- SimulateDocument13 pagesSimulateArunkumar SeshadriNo ratings yet
- Samkhya PhilosophyDocument9 pagesSamkhya Philosophyujlanvineetkumar2767No ratings yet
- Indus Safety-SyllabusDocument28 pagesIndus Safety-Syllabuskalyan1990No ratings yet
- Hangman LibraryDocument5 pagesHangman LibraryArunkumar SeshadriNo ratings yet
- Downloads: Everything You Need to Know About Belt DrivesDocument11 pagesDownloads: Everything You Need to Know About Belt DrivesArunkumar SeshadriNo ratings yet
- Fig 4Document1 pageFig 4Arunkumar SeshadriNo ratings yet
- CH 22Document75 pagesCH 22Urvish PatelNo ratings yet
- SimulateDocument13 pagesSimulateArunkumar SeshadriNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- U4Document173 pagesU4Virthish DKNo ratings yet
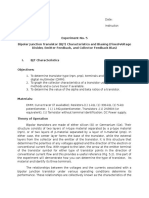
- ECE Experiment No.5Document11 pagesECE Experiment No.5John Wilben Sibayan ÜNo ratings yet
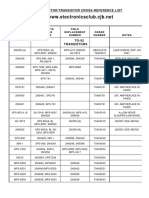
- Reemplazos Transistores PEAVEY Ej 70484140Document24 pagesReemplazos Transistores PEAVEY Ej 70484140Josue Hernandez Gutierrez100% (2)
- L380User Manual PDFDocument235 pagesL380User Manual PDFElhadj HicebNo ratings yet
- Takex GS-5SN Data SheetDocument6 pagesTakex GS-5SN Data SheetJMAC SupplyNo ratings yet
- Sinamics V20: Technical SlidesDocument51 pagesSinamics V20: Technical SlidesKhiem NguyenNo ratings yet
- Fig. 4.1: Different TransistorsDocument10 pagesFig. 4.1: Different Transistorsmsicoie1851No ratings yet
- Honeywell MagneticSensorsDocument13 pagesHoneywell MagneticSensorsRakesh S IndiaNo ratings yet
- Bachelor of Science in Electrical and Electronic EngineeringDocument22 pagesBachelor of Science in Electrical and Electronic EngineeringSharhan KhanNo ratings yet
- ABC's of FET's - Rufus P. Turner PDFDocument94 pagesABC's of FET's - Rufus P. Turner PDFAmador Garcia IIINo ratings yet
- 2N1613Document8 pages2N1613Patrick StivénNo ratings yet
- Heathkit IT-3120 Transistor TesterDocument49 pagesHeathkit IT-3120 Transistor TesterdonsterthemonsterNo ratings yet
- Wireless Data and Voice Communication Through Infra-Red LEDDocument25 pagesWireless Data and Voice Communication Through Infra-Red LEDManisha SafayaNo ratings yet
- NPN Silicon Epitaxial Planar TransistorDocument5 pagesNPN Silicon Epitaxial Planar TransistorLaZúu DomiciliosNo ratings yet
- h3ct 5uDocument2 pagesh3ct 5uSampath KumarNo ratings yet
- Bu 2508 AfDocument7 pagesBu 2508 AfMarcos MadrizNo ratings yet
- AC PWM Dimmer For ArduinoDocument15 pagesAC PWM Dimmer For ArduinoJavier PeresNo ratings yet
- Ia18asn14nom1 DatDocument3 pagesIa18asn14nom1 DatArnold StevenNo ratings yet
- Ps 58 KeyenceDocument12 pagesPs 58 KeyenceiuctmeNo ratings yet
- 03 - Inductive Sensors. BALLUFpdf PDFDocument302 pages03 - Inductive Sensors. BALLUFpdf PDFMoisesNo ratings yet
- Desinging Analog ChipsDocument242 pagesDesinging Analog ChipsRyan Sullenberger100% (12)
- Mini FM Station - 1Document39 pagesMini FM Station - 1electronicsmadeeasy_emeNo ratings yet
- S 15Document5 pagesS 15AmandaNo ratings yet
- Day 11Document39 pagesDay 11GERALD ELIAS MASS MENDEZNo ratings yet
- Testing Teccor Semiconductor Devices Using Curve TracersDocument20 pagesTesting Teccor Semiconductor Devices Using Curve TracersSajjad4434100% (1)
- KOBOLD KAL-A (KAL-7000 Series) Thermal Flow Transmitter User InstructionsDocument17 pagesKOBOLD KAL-A (KAL-7000 Series) Thermal Flow Transmitter User InstructionsMariana SerbanNo ratings yet
- Datasheet b1340Document2 pagesDatasheet b1340manuel vivasNo ratings yet
- Ecgr3156 Experiment 1 BJT Differential Pair With BJT Current MirrorDocument8 pagesEcgr3156 Experiment 1 BJT Differential Pair With BJT Current MirrorSargamNo ratings yet
- 2sc6011 Ds enDocument7 pages2sc6011 Ds enCah YonoNo ratings yet
- Balluff BOS017C DatasheetDocument2 pagesBalluff BOS017C DatasheetMizael MerinoNo ratings yet