You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Doe Nuclear Physics and Reactor Theory Volume 1 of 2 Doe-Hdbk-10191-93Document142 pagesDoe Nuclear Physics and Reactor Theory Volume 1 of 2 Doe-Hdbk-10191-93TiterNo ratings yet
- 30 LED ProjectsDocument60 pages30 LED ProjectsfrioycalorNo ratings yet
- IR Value For Electrical Cable and WiringDocument9 pagesIR Value For Electrical Cable and WiringSyamraj JayarajanNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Motor ControlDocument31 pagesMotor ControlMamoun Slamah Alzyoud100% (1)
- Construction of Electro MagnetsDocument7 pagesConstruction of Electro MagnetsjoetylorNo ratings yet
- TRANSDUCERDocument11 pagesTRANSDUCERLucks GonzalesNo ratings yet
- Jordanian Medical Tariff Schedule PublishedDocument120 pagesJordanian Medical Tariff Schedule PublishedMamoun Slamah AlzyoudNo ratings yet
- Monitor chlorine gas system pressure and vacuumDocument27 pagesMonitor chlorine gas system pressure and vacuumMamoun Slamah AlzyoudNo ratings yet
- Single Line DiagramDocument1 pageSingle Line DiagramMamoun Slamah AlzyoudNo ratings yet
- Measuring & Regu - Lation EquipmentDocument10 pagesMeasuring & Regu - Lation EquipmentMamoun Slamah AlzyoudNo ratings yet
- Mostly Missed CLADDocument20 pagesMostly Missed CLADDanny VuNo ratings yet
- 846 W042Document5 pages846 W042George KaridisNo ratings yet
- Microsoft Product GuideDocument97 pagesMicrosoft Product GuidedouglasvnasNo ratings yet
- Ntroduction 5.1.1: Block Diagram: Ni MyrioDocument2 pagesNtroduction 5.1.1: Block Diagram: Ni MyrioMamoun Slamah AlzyoudNo ratings yet
- Clad Exam Prep Guide EnglishDocument16 pagesClad Exam Prep Guide EnglishmeetnatureNo ratings yet
- Section 1: Section 2: Troubleshooting and Debugging VisDocument1 pageSection 1: Section 2: Troubleshooting and Debugging VisMamoun Slamah AlzyoudNo ratings yet
- Manual En12221Document37 pagesManual En12221Mamoun Slamah AlzyoudNo ratings yet
- Chapter 00 - Table of ContentsDocument12 pagesChapter 00 - Table of ContentssiekhaiNo ratings yet
- Servo MechanismDocument24 pagesServo Mechanismmushahid980No ratings yet
- Biomedical Electronics Systems & TechnologiesDocument19 pagesBiomedical Electronics Systems & TechnologiesMamoun Slamah AlzyoudNo ratings yet
- Basics of DC DrivesDocument25 pagesBasics of DC DrivesCharan Kumar P100% (1)
- Tutorial: Develop Modular Apps with SubVIsDocument6 pagesTutorial: Develop Modular Apps with SubVIsMamoun Slamah AlzyoudNo ratings yet
- Volunteer Application Form - English-2Document5 pagesVolunteer Application Form - English-2Yasmin FarhanNo ratings yet
- Unit 1Document56 pagesUnit 1Alexandre LaraNo ratings yet
- Experiment 1Document3 pagesExperiment 1Mamoun Slamah AlzyoudNo ratings yet
- De20sol 141118125251 Conversion Gate02Document103 pagesDe20sol 141118125251 Conversion Gate02Mamoun Slamah AlzyoudNo ratings yet
- NI Tutorial 7573 enDocument7 pagesNI Tutorial 7573 enMamoun Slamah AlzyoudNo ratings yet
- NI Tutorial 14876 enDocument3 pagesNI Tutorial 14876 enMamoun Slamah AlzyoudNo ratings yet
- 10 Analysis of Categorical VariablesDocument3 pages10 Analysis of Categorical VariablesMamoun Slamah AlzyoudNo ratings yet
- Sensorless step recognition for stepping motorsDocument8 pagesSensorless step recognition for stepping motorsMamoun Slamah AlzyoudNo ratings yet
- Communications Transmission Systems HW, Eng. Sharief Nasr: F (MHZ) D (KM)Document1 pageCommunications Transmission Systems HW, Eng. Sharief Nasr: F (MHZ) D (KM)Mamoun Slamah AlzyoudNo ratings yet
- Lab 8 ReportDocument8 pagesLab 8 ReportMamoun Slamah AlzyoudNo ratings yet
- Install VoiBridge VoIP-to-GSM GatewayDocument36 pagesInstall VoiBridge VoIP-to-GSM GatewayFitim IsmailiNo ratings yet
- CMP Motors CatalogueDocument54 pagesCMP Motors CatalogueMuhammad HanafiNo ratings yet
- An N Input Omega Network Has Loga N StagesDocument3 pagesAn N Input Omega Network Has Loga N Stagesrajsingh11No ratings yet
- Interrupt vector table: An essential data structureDocument3 pagesInterrupt vector table: An essential data structureSAMEER AHMADNo ratings yet
- Eaton Online UPS User ManualDocument40 pagesEaton Online UPS User ManualMatias Loza ZapataNo ratings yet
- 02 Operating Instr RH170-B BCS 3725070 enDocument28 pages02 Operating Instr RH170-B BCS 3725070 enaalazaro29No ratings yet
- Electrical Hotspot Detection NoteDocument2 pagesElectrical Hotspot Detection NotePillai Sreejith100% (2)
- Electromagnetic Radiation and Health - AdishreeDocument3 pagesElectromagnetic Radiation and Health - AdishreeAniket HeliwalNo ratings yet
- University of Cambridge International Examinations International General Certificate of Secondary EducationDocument8 pagesUniversity of Cambridge International Examinations International General Certificate of Secondary EducationHany ElGezawyNo ratings yet
- Experiment No. 1 (Communication System)Document2 pagesExperiment No. 1 (Communication System)RameezAmerNo ratings yet
- CET Power - ALTO - User Manual v7.0Document41 pagesCET Power - ALTO - User Manual v7.0Luis CanepaNo ratings yet
- Building Management - Monitor Building Power SupplyDocument1 pageBuilding Management - Monitor Building Power SupplyMusembiNo ratings yet
- Cummins Power Generation Proposed Aba MV S/S Associated WorksDocument2 pagesCummins Power Generation Proposed Aba MV S/S Associated WorksbenNo ratings yet
- Control of Real and Reactive Power Using A Novel SVC Feedback System For Load Sharing in Grid Connected PV Power SystemDocument9 pagesControl of Real and Reactive Power Using A Novel SVC Feedback System For Load Sharing in Grid Connected PV Power SystemOlanshileNo ratings yet
- Manual de Usuario de La Consola Tapco Mix260fxDocument28 pagesManual de Usuario de La Consola Tapco Mix260fxFrank ColmenaresNo ratings yet
- DTC Reset 2007 HondaDocument2 pagesDTC Reset 2007 HondaMas PoerNo ratings yet
- Research Article: Dynamic Modelling of A Solar Water Pumping System With Energy StorageDocument13 pagesResearch Article: Dynamic Modelling of A Solar Water Pumping System With Energy Storagehabtamu melsewNo ratings yet
- Cmos Ota ThesisDocument5 pagesCmos Ota Thesislisabrownolathe100% (2)
- Digikey Part # MFG Part # Description Qty Cost Line Cost Designator Total CostDocument1 pageDigikey Part # MFG Part # Description Qty Cost Line Cost Designator Total CostSmit BhenjaliyaNo ratings yet
- Manual Microfono LVLR 24 LeemDocument10 pagesManual Microfono LVLR 24 Leembuscador09No ratings yet
- HG140Document1 pageHG140zeshankhanNo ratings yet
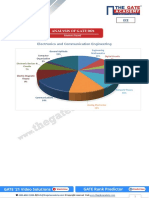
- Gate Analysis 2021 Ece - v2Document16 pagesGate Analysis 2021 Ece - v2learning duniaNo ratings yet
- Applied Physics LCDDocument24 pagesApplied Physics LCDSubhaNo ratings yet
- Applied Electronics - 1 (Allied)Document155 pagesApplied Electronics - 1 (Allied)nanobala15100% (1)
- I-V and P-V Plots of Solar Cell Module at Different IrradiancesDocument9 pagesI-V and P-V Plots of Solar Cell Module at Different IrradiancesHabib SukmaNo ratings yet
- Asynchronous FIFODocument7 pagesAsynchronous FIFOshivakumar v gadedNo ratings yet
- Ramniveth UpdatedDocument3 pagesRamniveth UpdatedJulia SilvaNo ratings yet