You might also like
- Parallel Bar & Push Routine GuideDocument5 pagesParallel Bar & Push Routine GuideJonathan FajardoNo ratings yet
- Build Own CockpitDocument15 pagesBuild Own CockpitJaafar Ali Mohamad100% (1)
- (James E. Tomayko) Computers Take FlightDocument197 pages(James E. Tomayko) Computers Take FlightgegeleloloNo ratings yet
- Flight ControlsDocument51 pagesFlight ControlsJonathan FajardoNo ratings yet
- Learning Solidworks 2012: Modeling, Assembly and AnalysisDocument44 pagesLearning Solidworks 2012: Modeling, Assembly and AnalysisMudLogggerAUSNo ratings yet
- Since The 1930s Scientists Have Been Searching For Particles That Are Simultaneously Matter and AntimatterDocument2 pagesSince The 1930s Scientists Have Been Searching For Particles That Are Simultaneously Matter and AntimatterJonathan FajardoNo ratings yet
- Analysis and Design of Flight Vehicle Structures by E.F. BruhnDocument2 pagesAnalysis and Design of Flight Vehicle Structures by E.F. Bruhndusty_13No ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- FilelistDocument35 pagesFilelistDionisie DamaschinNo ratings yet
- Indian Journal of Chemical Technology: Guidelines For AuthorsDocument2 pagesIndian Journal of Chemical Technology: Guidelines For Authorsdreamboy87No ratings yet
- Saurabh Chopade Resume APRDocument1 pageSaurabh Chopade Resume APREasy TutsNo ratings yet
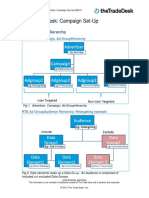
- The Trade DeskDocument13 pagesThe Trade DeskAmpLiveNo ratings yet
- Payroll Management SystemDocument70 pagesPayroll Management Systemaurorashiva1100% (1)
- Rsit Win ServerDocument68 pagesRsit Win ServerJorge ArévaloNo ratings yet
- Comparing Leading Cloud Service ProvidersDocument2 pagesComparing Leading Cloud Service Providersharshaks116No ratings yet
- Data Acquisition Catalog enDocument17 pagesData Acquisition Catalog enmsureNo ratings yet
- Marico Over The WallDocument12 pagesMarico Over The WallNicole RodriguezNo ratings yet
- Create roaming user profile in 2 stepsDocument91 pagesCreate roaming user profile in 2 stepsSherbaz SahakNo ratings yet
- WowzaMediaServerPro UsersGuideDocument80 pagesWowzaMediaServerPro UsersGuidemerbywerbyNo ratings yet
- Unit 16: Voip-4D Primer - Building Voice Infrastructure in Developing RegionsDocument62 pagesUnit 16: Voip-4D Primer - Building Voice Infrastructure in Developing RegionsJosetheking CrackedsoftwaresNo ratings yet
- IS306 Lecture 05Document35 pagesIS306 Lecture 05سعد محمد سعدNo ratings yet
- Fisher - S Exact TestDocument14 pagesFisher - S Exact TestLove IbanezNo ratings yet
- 007-001443-008 PayShield 10K Host Command Examples V1.8aDocument69 pages007-001443-008 PayShield 10K Host Command Examples V1.8ajvenero1987No ratings yet
- Es Model ExamDocument3 pagesEs Model ExamAarun ArasanNo ratings yet
- Danfoss OMMDocument36 pagesDanfoss OMMDi ScottNo ratings yet
- Simove: Maximize Your Production FlexibilityDocument2 pagesSimove: Maximize Your Production FlexibilityJose L. CamarilloNo ratings yet
- Class of Service - AT&TDocument22 pagesClass of Service - AT&TMarcelo SaldanhaNo ratings yet
- DBMS Practical File DBMS Practical FileDocument39 pagesDBMS Practical File DBMS Practical FileNisarga NaikNo ratings yet
- Keda SAP ERP Implementation - Analysis - MediumDocument8 pagesKeda SAP ERP Implementation - Analysis - Mediumbharat258No ratings yet
- Testing WiresharkDocument9 pagesTesting WiresharkYair MeraNo ratings yet
- Criminal Investigation (LEA) Use CaseDocument2 pagesCriminal Investigation (LEA) Use CaseDewa AsmaraNo ratings yet
- POWERVC Quick Deployment GuideDocument7 pagesPOWERVC Quick Deployment GuideAhmed (Mash) MashhourNo ratings yet
- GPON ONU FHR 1100 GZB 40Mbps 1G EthernetDocument1 pageGPON ONU FHR 1100 GZB 40Mbps 1G EthernetMarketing SatcomNo ratings yet
- Data Structure Preliminaries, Array and Linked ListDocument9 pagesData Structure Preliminaries, Array and Linked ListAntonio RogersNo ratings yet
- B WAS40P Part1 MAN2104Document12 pagesB WAS40P Part1 MAN2104Tsvetan PenevNo ratings yet
- 20487B ENU TrainerHandbookDocument688 pages20487B ENU TrainerHandbookElsa Gonçalves100% (1)
- Tweak Network Configurations of OpenGeo Suite ServerDocument3 pagesTweak Network Configurations of OpenGeo Suite ServerSiAgam DevinfoNo ratings yet
- MC-2 SERIES OPERATION MANUALDocument21 pagesMC-2 SERIES OPERATION MANUALsergio paulo chavesNo ratings yet