You might also like
- White Paper On "High Antennas ForDocument6 pagesWhite Paper On "High Antennas Fororg25grNo ratings yet
- Antenna Basic R&SDocument32 pagesAntenna Basic R&SKelvin AranaNo ratings yet
- Sys MLDocument14 pagesSys MLorg25grNo ratings yet
- Continuous to Discrete Conversion MethodsDocument12 pagesContinuous to Discrete Conversion Methodsorg25grNo ratings yet
- Transfer Functions and Frequency Responses ExplainedDocument13 pagesTransfer Functions and Frequency Responses Explainedorg25grNo ratings yet
- Module 5.scilabDocument7 pagesModule 5.scilaborg25grNo ratings yet
- Module 4.scilabDocument13 pagesModule 4.scilaborg25grNo ratings yet
- Bitcoin Manifesto - Satoshi NakamotoDocument9 pagesBitcoin Manifesto - Satoshi NakamotoJessica Vu100% (1)
- The Kilo Doctrine V1.0Document42 pagesThe Kilo Doctrine V1.0org25grNo ratings yet
- Scilab Ninja: Module 6: Discrete-Time Control SystemsDocument8 pagesScilab Ninja: Module 6: Discrete-Time Control Systemsorg25grNo ratings yet
- Introduction To Protégé Introduction To Protégé: Ontologies OntologiesDocument11 pagesIntroduction To Protégé Introduction To Protégé: Ontologies Ontologiesorg25grNo ratings yet
- Walking Guide To 42 Greek IslandsDocument297 pagesWalking Guide To 42 Greek Islandsorg25grNo ratings yet
- Scilab Ninja: Module 6: Discrete-Time Control SystemsDocument8 pagesScilab Ninja: Module 6: Discrete-Time Control Systemsorg25grNo ratings yet
- Module2 ScilabDocument13 pagesModule2 Scilaborg25grNo ratings yet
- Scilab Ninja: Module 3: Classical Loopshaping DesignDocument12 pagesScilab Ninja: Module 3: Classical Loopshaping Designorg25grNo ratings yet
- OberonDocument111 pagesOberonorg25grNo ratings yet
- MatLab NotesDocument48 pagesMatLab Notesorg25grNo ratings yet
- PEMFCDocument8 pagesPEMFCorg25grNo ratings yet
- Characterization and Simulation of A 3.3 KW Pem Fuel CellDocument4 pagesCharacterization and Simulation of A 3.3 KW Pem Fuel Cellorg25grNo ratings yet
- The Key To C4ISR InteroperabilityDocument8 pagesThe Key To C4ISR Interoperabilityorg25grNo ratings yet
- PEMFCDocument8 pagesPEMFCorg25grNo ratings yet
- FirpmDocument5 pagesFirpmnotthetupNo ratings yet
- TI89 For Linear AlgebraDocument5 pagesTI89 For Linear Algebrapfeffer92No ratings yet
- Diagonal IzationDocument13 pagesDiagonal IzationSeife ShiferawNo ratings yet
- 8GE01 Antenna BasicsDocument32 pages8GE01 Antenna BasicsIsmael Garcia SanchezNo ratings yet
- Network and Spectrum AnalyzersDocument27 pagesNetwork and Spectrum Analyzersorg25grNo ratings yet
- MFJ 269Document40 pagesMFJ 269cv86No ratings yet
- GRC TutorialDocument29 pagesGRC Tutorialorg25grNo ratings yet
- Avl TreesDocument12 pagesAvl Treesorg25grNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Fiscal IzationDocument4 pagesFiscal IzationMilan JankovicNo ratings yet
- DBMS IMP Questions and AnswersDocument4 pagesDBMS IMP Questions and Answersprasadghari100% (1)
- Fast-Start Failover Best Practices for Automatic Failover Using Oracle Data Guard 10g Release 2Document55 pagesFast-Start Failover Best Practices for Automatic Failover Using Oracle Data Guard 10g Release 2venu_dbaNo ratings yet
- Electronic Data InterchangeDocument12 pagesElectronic Data InterchangeHytham AburjyaNo ratings yet
- Oracle Database 11g Express EditionDocument2 pagesOracle Database 11g Express EditionDinesh Sanagavarapu100% (1)
- Creating New Form in Oracle AppsDocument4 pagesCreating New Form in Oracle AppsSudha KrishnaNo ratings yet
- Notes of Data Science Unit 3Document22 pagesNotes of Data Science Unit 3Nikhilan VNo ratings yet
- Install Mongodb On Ubuntu 16.04 Lts - Hevo Blog PDFDocument3 pagesInstall Mongodb On Ubuntu 16.04 Lts - Hevo Blog PDFShashin KuroNo ratings yet
- Distinction Task 6.3 - Custom Program DesignDocument3 pagesDistinction Task 6.3 - Custom Program DesignĐức NguyễnNo ratings yet
- CAClarityPPM TechRefGuide ENUDocument67 pagesCAClarityPPM TechRefGuide ENUPrashank SinghNo ratings yet
- Thor Teaches Study Guide CISSP Domain 8Document30 pagesThor Teaches Study Guide CISSP Domain 8baby100% (1)
- A Guide To Barcode Label Printing For IBM Midrange Servers ... - ZebraDocument75 pagesA Guide To Barcode Label Printing For IBM Midrange Servers ... - ZebraRishi AdlakhaNo ratings yet
- Chapter 12 The Applications of FBS-PLC Communication LinkDocument44 pagesChapter 12 The Applications of FBS-PLC Communication LinkEngr Nayyer Nayyab MalikNo ratings yet
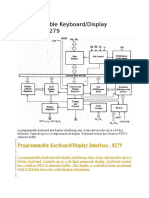
- Programmable Keyboard/Display Interface - 8279Document10 pagesProgrammable Keyboard/Display Interface - 8279prashantvlsiNo ratings yet
- HD - Human Design Project HDDBDocument1 pageHD - Human Design Project HDDBlkphilipNo ratings yet
- Final DBMS ManualDocument92 pagesFinal DBMS ManualThe ultimate MathsNo ratings yet
- Transport LayerDocument104 pagesTransport LayerKrutarth Ganatra0% (1)
- Vit Vlsi Fat PpaersDocument3 pagesVit Vlsi Fat PpaersDebolina RoyNo ratings yet
- CS 142 Lecture Note 2016-2Document52 pagesCS 142 Lecture Note 2016-2MUSTAPHA SHEHU ABUBAKARNo ratings yet
- Webapp With Golang Anti TextbookDocument148 pagesWebapp With Golang Anti TextbookSuraj100% (1)
- Cimplicity - System Sentry Operation ManualDocument89 pagesCimplicity - System Sentry Operation ManualEduardo DiazNo ratings yet
- Modbus and Wireless HART Protocol's ComparisonDocument3 pagesModbus and Wireless HART Protocol's ComparisonHOW WORTHNo ratings yet
- SDLC and HDLC Protocols ComparisonDocument45 pagesSDLC and HDLC Protocols ComparisonIan VillarojoNo ratings yet
- UnzipDocument13 pagesUnzipNaga LakshmaiahNo ratings yet
- PLSQL 1 3 SG PDFDocument26 pagesPLSQL 1 3 SG PDFPaulina CastrooNo ratings yet
- Question Bank and Objectives MpiDocument7 pagesQuestion Bank and Objectives Mpiaditya_pundirNo ratings yet
- Sublime Text unofficial docsDocument81 pagesSublime Text unofficial docsAlex HübnerNo ratings yet
- Hi-Trac Anpr Protocol Jan 2013Document8 pagesHi-Trac Anpr Protocol Jan 2013FJGV7No ratings yet
- HD Crash InfoDocument36 pagesHD Crash Infom_haebeckeNo ratings yet
- Sigma Enterprise - 4G 5G UsecasesDocument24 pagesSigma Enterprise - 4G 5G UsecasesĐinh Nhất LinhNo ratings yet