You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Durga's Interview QuestionsDocument22 pagesDurga's Interview QuestionsRaJu SinGh82% (11)
- Modern Compressible FlowDocument241 pagesModern Compressible Flowapi-2658158889% (28)
- Fundamental Mechanics of Fluids Third Edition PDFDocument15 pagesFundamental Mechanics of Fluids Third Edition PDFMarcusHuynh880% (3)
- Axial Flow Compressor Mean Line DesignDocument119 pagesAxial Flow Compressor Mean Line DesignMostafa Abd Almaksoud100% (1)
- Axial Flow Compressor Mean Line DesignDocument119 pagesAxial Flow Compressor Mean Line DesignMostafa Abd Almaksoud100% (1)
- An Experimental Study of Drag Reduction Devices For A Trailer Underbody and Base PDFDocument17 pagesAn Experimental Study of Drag Reduction Devices For A Trailer Underbody and Base PDFMarcusHuynh88No ratings yet
- Longer and Heavy VehiclesDocument49 pagesLonger and Heavy VehiclesMarcusHuynh88No ratings yet
- Aerodynamics overview of heavy vehicle drag reductionDocument18 pagesAerodynamics overview of heavy vehicle drag reductionMarcusHuynh88No ratings yet
- Drag Reduction of Bluff-Based Body by Wake Control Vanes PDFDocument8 pagesDrag Reduction of Bluff-Based Body by Wake Control Vanes PDFMarcusHuynh88No ratings yet
- Experimental Investigation of Ground Transportation Systems (GTS) Project For Heavy Vehicle Drag Reduction PDFDocument23 pagesExperimental Investigation of Ground Transportation Systems (GTS) Project For Heavy Vehicle Drag Reduction PDFMarcusHuynh88No ratings yet
- Aerodynamic Drag of Heavy Vehicles (Class 7-8) Simulation and BenchmarkingDocument21 pagesAerodynamic Drag of Heavy Vehicles (Class 7-8) Simulation and BenchmarkingMarcusHuynh88No ratings yet
- Aerodynamics overview of heavy vehicle drag reductionDocument18 pagesAerodynamics overview of heavy vehicle drag reductionMarcusHuynh88No ratings yet
- Compressor CharacterisicsDocument97 pagesCompressor Characterisicsario13No ratings yet
- EVN's Plan for Developing a Smart Grid in VietnamDocument18 pagesEVN's Plan for Developing a Smart Grid in VietnamMarcusHuynh88No ratings yet
- Shrimp Farming and The EnvironmentDocument25 pagesShrimp Farming and The EnvironmentMarcusHuynh88No ratings yet
- Two Dimensional Design of Axial CompressorDocument160 pagesTwo Dimensional Design of Axial CompressorMarcusHuynh88No ratings yet
- Fisheries and AquacultureDocument36 pagesFisheries and AquacultureMarcusHuynh88No ratings yet
- Two Dimensional Design of Axial CompressorDocument160 pagesTwo Dimensional Design of Axial CompressorMarcusHuynh88No ratings yet
- Compressible FLow - Chapt 36 of CRC HandbookDocument18 pagesCompressible FLow - Chapt 36 of CRC HandbookJoão HenriquesNo ratings yet
- DOT Truck Casualty StudyDocument15 pagesDOT Truck Casualty StudyMarcusHuynh88No ratings yet
- AE 3450 - Thermodynamics and Compressible FlowDocument1 pageAE 3450 - Thermodynamics and Compressible FlowMarcusHuynh88No ratings yet
- Mehran University of Engineering and Technology SZAB Campus Khairpur Mir'sDocument64 pagesMehran University of Engineering and Technology SZAB Campus Khairpur Mir'sMarcusHuynh88No ratings yet
- Sink, Float, Hover - Design A Submarine!: Quick PeekDocument6 pagesSink, Float, Hover - Design A Submarine!: Quick PeekMarcusHuynh88No ratings yet
- Concepts From ThermodynamicsDocument20 pagesConcepts From ThermodynamicsMarcusHuynh88No ratings yet
- Dive in Submarines - Eric Williams - Tony Trakadas PDFDocument26 pagesDive in Submarines - Eric Williams - Tony Trakadas PDFMarcusHuynh88No ratings yet
- Improving Vehicle Aerodynamics For BetterDocument18 pagesImproving Vehicle Aerodynamics For BetterMarcusHuynh88100% (1)
- Accounting Information System Romney Ch18Document153 pagesAccounting Information System Romney Ch18Bravo AlditoNo ratings yet
- Portable Machine MM2000iDocument3 pagesPortable Machine MM2000ijromero_rpgNo ratings yet
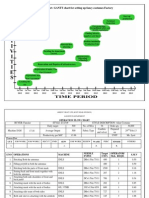
- GANTT Chart and Opertn BRK DwnsDocument10 pagesGANTT Chart and Opertn BRK DwnsJyoti PathrejaNo ratings yet
- Licence Fees For Satellite Services, Networks and Terminals in The Cept October 2001Document64 pagesLicence Fees For Satellite Services, Networks and Terminals in The Cept October 2001Anonymous 3Vgw3v2ZcHNo ratings yet
- Presentation Consulting Change of Fiscal PeriodsDocument16 pagesPresentation Consulting Change of Fiscal PeriodsmnryanNo ratings yet
- 1 Databases and Database Management SystemsDocument83 pages1 Databases and Database Management SystemsUday KumarNo ratings yet
- TechTopics58 - E-Rated Vs R Rated FusesDocument2 pagesTechTopics58 - E-Rated Vs R Rated FusesBigBaby JulianNo ratings yet
- Data Sheet 3196 MT-i - 3X4-13 - 130 m3h X 47 M GBQ - 49.991 - 14Document10 pagesData Sheet 3196 MT-i - 3X4-13 - 130 m3h X 47 M GBQ - 49.991 - 14Vinícius Toni MartinsNo ratings yet
- Oracle Complex PO RetainageDocument19 pagesOracle Complex PO RetainageabiyeasamenewNo ratings yet
- Richa Industries Wins First Rail Over Bridge Project For Railways (Company Update)Document2 pagesRicha Industries Wins First Rail Over Bridge Project For Railways (Company Update)Shyam SunderNo ratings yet
- E PKS: Control Builder Parameter ReferenceDocument3,341 pagesE PKS: Control Builder Parameter ReferenceAnkoosh MandanNo ratings yet
- UPS Case QuestionsDocument3 pagesUPS Case QuestionsTalha Saeed100% (1)
- Abhishek Kumar SinghDocument3 pagesAbhishek Kumar SinghAshutosh UpadhyayNo ratings yet
- Alcatel Extension CodesDocument2 pagesAlcatel Extension Codesranma_ptNo ratings yet
- Cam350 810Document4 pagesCam350 810Frank ZamoraNo ratings yet
- SMART BRO Data Pro Plans App FormDocument2 pagesSMART BRO Data Pro Plans App FormCatherine TominNo ratings yet
- FAST Project Phase 2 Submission UpdatesDocument91 pagesFAST Project Phase 2 Submission UpdatesEzon AguilaNo ratings yet
- Philips: Failure Mode and Effect AnalysisDocument74 pagesPhilips: Failure Mode and Effect AnalysisBunga MelurNo ratings yet
- WPD Wpbwall Fans Catalog 4820Document24 pagesWPD Wpbwall Fans Catalog 4820beemer03No ratings yet
- Combustion Engine Development Utilizing Design For Six Sigma (DFSS)Document8 pagesCombustion Engine Development Utilizing Design For Six Sigma (DFSS)dilip sahooNo ratings yet
- Landfill Capacity CalculationDocument3 pagesLandfill Capacity CalculationJhon Jairo Mazuera Guzman50% (2)
- Maintenance Technician Job OpeningDocument1 pageMaintenance Technician Job OpeningRizky NafandyNo ratings yet
- Bleriot XIDocument8 pagesBleriot XIAlejandro M. Bianchi100% (1)
- Flipkart's Big Billion Day Sale IT FailuresDocument21 pagesFlipkart's Big Billion Day Sale IT FailuresManisha KumariNo ratings yet
- Ge Inlet Air CoolingDocument4 pagesGe Inlet Air Coolinggeorge gabriel100% (1)
- Siebel Field ServiceDocument4 pagesSiebel Field ServicesubbaraocrmNo ratings yet
- RISK ASESSMENT For SKYLIGHTDocument23 pagesRISK ASESSMENT For SKYLIGHTadeoye Adeyemi100% (1)
- Gyrolok CatalogDocument58 pagesGyrolok CatalogmartinvandoornNo ratings yet
- Electronic Payment Systems Security and Protocols ExplainedDocument36 pagesElectronic Payment Systems Security and Protocols ExplainedPaksmilerNo ratings yet