You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Oscillators Module 02Document20 pagesOscillators Module 02ervaishu5342100% (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Electronic OscillatorDocument15 pagesElectronic OscillatorSuresh PharamasivamNo ratings yet
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- RF Sine Wave OscillatorsDocument3 pagesRF Sine Wave Oscillatorsmohammed229No ratings yet
- Topic 2 OscillatorDocument30 pagesTopic 2 OscillatorAzie MasiraNo ratings yet
- High Frequency VCO Design and SchematicsDocument18 pagesHigh Frequency VCO Design and SchematicsHamayoun MurtazaNo ratings yet
- Historic LC oscillator circuit designsDocument17 pagesHistoric LC oscillator circuit designsjerricalday100% (2)
- Analog Mini Project Group2Document21 pagesAnalog Mini Project Group2Threefold CordNo ratings yet
- Oscillators RC, LC, Quartz Lecture 04 Services - Eng.uts - edu.Au-pmcl-DeDocument5 pagesOscillators RC, LC, Quartz Lecture 04 Services - Eng.uts - edu.Au-pmcl-DeEnrik VillaNo ratings yet
- LC Circuit - Wikipedia, The Free EncyclopediaDocument9 pagesLC Circuit - Wikipedia, The Free EncyclopediaAdrian TanaseNo ratings yet
- ELE324 Oscillators L3 V2Document55 pagesELE324 Oscillators L3 V2Eduar MhangoNo ratings yet
- Electrical Resonance - WikipediaDocument14 pagesElectrical Resonance - WikipediaMahmoudNo ratings yet
- Assignment 2Document9 pagesAssignment 2Noor HassanNo ratings yet
- O 0 ScillatorDocument46 pagesO 0 ScillatorNandan Kumar JhaNo ratings yet
- Oscillator CircuitsDocument19 pagesOscillator Circuits21-08523No ratings yet
- LC and OscillatorDocument54 pagesLC and OscillatorFatin FadhlinaNo ratings yet
- AIC 2 Marks Q & ADocument38 pagesAIC 2 Marks Q & ASriramNo ratings yet
- High Frequency VCO Design and SchematicsDocument9 pagesHigh Frequency VCO Design and SchematicsFreeFM100% (5)
- Digitally Controlled Oscillator ReportDocument18 pagesDigitally Controlled Oscillator ReportVinidhra ShivakumarNo ratings yet
- Experiment No: 4 Title: Sinusoidal Oscillators ObjectiveDocument5 pagesExperiment No: 4 Title: Sinusoidal Oscillators ObjectiveShibeshwar MandalNo ratings yet
- Y YyyDocument15 pagesY YyyDivya Prakash MishraNo ratings yet
- RC Oscillator: DescriptionDocument5 pagesRC Oscillator: DescriptionTomoghna DeyNo ratings yet
- Colpitts OscillatorDocument11 pagesColpitts Oscillatordinesh189No ratings yet
- Colpitts Oscillator ReportDocument8 pagesColpitts Oscillator ReportAliNo ratings yet
- Unit - 6, AECDocument39 pagesUnit - 6, AECSahith ChegondaNo ratings yet
- CMOS 1.8GHz VCODocument4 pagesCMOS 1.8GHz VCOsanjeevsoni64No ratings yet
- OscillatorsDocument45 pagesOscillatorsAliAbbasNo ratings yet
- Wave SapingDocument43 pagesWave SapinglsrinivasnteceNo ratings yet
- Chapter 2 - OscillatorsDocument31 pagesChapter 2 - OscillatorsAbdul Qawie Jumaan100% (1)
- ECE 1371 Term Paper: LC Oscillators Theory, Design and TrendDocument15 pagesECE 1371 Term Paper: LC Oscillators Theory, Design and Trendaustin_lee_37No ratings yet
- Nonlinear Effects in Oscillators and SynthesizersDocument23 pagesNonlinear Effects in Oscillators and SynthesizersAKISNo ratings yet
- Lessons in Electric CircuitsDocument27 pagesLessons in Electric Circuitsvish_vinnyNo ratings yet
- Colpitts OscillatorDocument3 pagesColpitts Oscillatorasra 10100% (2)
- Oscillator NotesDocument11 pagesOscillator NotesHarsh SinghNo ratings yet
- Demonstration of A Switched Resonator Concept in A Dual-Band Monolithic CMOS LC-nned VCODocument4 pagesDemonstration of A Switched Resonator Concept in A Dual-Band Monolithic CMOS LC-nned VCOJeong-geun KimNo ratings yet
- A 6.1-7.68 GHZ CMOS LC-Voltage Controlled Oscillators (VCO)Document4 pagesA 6.1-7.68 GHZ CMOS LC-Voltage Controlled Oscillators (VCO)dhrubNo ratings yet
- Mark Paul S. Ganzalino Bs Ece 2-4 Signal Processing Devices: Phase ChangeDocument2 pagesMark Paul S. Ganzalino Bs Ece 2-4 Signal Processing Devices: Phase ChangeMark Paul Santin GanzalinoNo ratings yet
- Review Paper On Vco - FinalDocument4 pagesReview Paper On Vco - FinalPunitAgrawalNo ratings yet
- Oscillator FundamentalsDocument58 pagesOscillator FundamentalsAR de SouzaNo ratings yet
- Colpitts OscillatorDocument4 pagesColpitts OscillatorAnimesh BhanjaNo ratings yet
- 2.0 Oscillators 2.0 Oscillators: Linear DC Power Supply and Various Types Linear DC Power Supply and Various TypesDocument47 pages2.0 Oscillators 2.0 Oscillators: Linear DC Power Supply and Various Types Linear DC Power Supply and Various TypesSadrina MahamudNo ratings yet
- Lesson 3 Tuned OscillatorsDocument25 pagesLesson 3 Tuned OscillatorsOdoch HerbertNo ratings yet
- Question BankDocument3 pagesQuestion BankREjosh BonifacioNo ratings yet
- Power Line Carrier CommunicationDocument11 pagesPower Line Carrier Communicationthe_ray004100% (1)
- Oscillator BasicsDocument3 pagesOscillator BasicsRam Krishan SharmaNo ratings yet
- Coilcraft-eBook RF MagneticsDocument18 pagesCoilcraft-eBook RF MagneticsIstvan NagyNo ratings yet
- 1 Electrical - and - Electronics - Measurment. McGraw Hill, 2013-413-651Document239 pages1 Electrical - and - Electronics - Measurment. McGraw Hill, 2013-413-651Andrea Acuña100% (1)
- Unit - 5 - Oscillators & TimersDocument45 pagesUnit - 5 - Oscillators & TimersHarish Kumar K.SNo ratings yet
- Types of Oscillator CircuitsDocument10 pagesTypes of Oscillator CircuitsSam XingxnNo ratings yet
- RF Electronics Chapter on Oscillator PrinciplesDocument17 pagesRF Electronics Chapter on Oscillator PrinciplesJos1No ratings yet
- OscilatorDocument8 pagesOscilatorericoNo ratings yet
- oscillatorDocument21 pagesoscillatorShivvu SinghNo ratings yet
- Unit - Iii - Tuned Amplifiers Two Marks Question & AnswerDocument9 pagesUnit - Iii - Tuned Amplifiers Two Marks Question & AnswerGokulScribdNo ratings yet
- Ec100 Model Question Paper With AnswersDocument35 pagesEc100 Model Question Paper With AnswersSanjay P NambiarNo ratings yet
- Aec Lab ManualDocument17 pagesAec Lab ManualprofharishjoshiNo ratings yet
- Types of Electronic OscillatorDocument4 pagesTypes of Electronic OscillatornidakhalidNo ratings yet
- Introduction To Piezoelectric Force SensorsDocument3 pagesIntroduction To Piezoelectric Force SensorsmiremadmiladNo ratings yet
- LoDocument2 pagesLoFuh ValleryNo ratings yet
- SD Card Upgrade Operating InstructionDocument3 pagesSD Card Upgrade Operating InstructionFuh ValleryNo ratings yet
- Electrical Engineer (Professional) CLASSIC TemplateDocument1 pageElectrical Engineer (Professional) CLASSIC TemplateNguyen LongNo ratings yet
- Job Motivation TemplateDocument1 pageJob Motivation TemplateKevin Simbolon50% (2)
- 2006 18 Spring Wiring Matters Power Factor Correction PFCDocument3 pages2006 18 Spring Wiring Matters Power Factor Correction PFCArsyad Harus SemangattNo ratings yet
- En CD00153725Document18 pagesEn CD00153725Fuh ValleryNo ratings yet
- Writing Application LetterDocument6 pagesWriting Application LetterNouman Ahmed HelaliNo ratings yet
- Microcontroller Based Power Transformer Protection Highbrigde Solar Oil Mills For Local Farmers Hovatek For Video DownloadDocument1 pageMicrocontroller Based Power Transformer Protection Highbrigde Solar Oil Mills For Local Farmers Hovatek For Video DownloadFuh ValleryNo ratings yet
- Job Application Letter TemplateDocument2 pagesJob Application Letter TemplateFuh Vallery100% (1)
- Interfacing GSM Module With PIC MicrocontrollerDocument5 pagesInterfacing GSM Module With PIC MicrocontrollerFuh Vallery100% (2)
- ACS754 CurrentSensorDocument11 pagesACS754 CurrentSensorFuh Vallery100% (2)
- Chapter Three2Document12 pagesChapter Three2Fuh ValleryNo ratings yet
- Create UIs Using XMLDocument11 pagesCreate UIs Using XMLVaheed AhammedNo ratings yet
- Interfacing GSM Module With PIC MicrocontrollerDocument5 pagesInterfacing GSM Module With PIC MicrocontrollerFuh Vallery100% (2)
- Refridgeration WorkshopDocument1 pageRefridgeration WorkshopFuh ValleryNo ratings yet
- AC Power Control With Thyristor Using Pic MicrocontrollerDocument10 pagesAC Power Control With Thyristor Using Pic MicrocontrollerFuh Vallery100% (2)
- Compressor Diagram of FridgeDocument1 pageCompressor Diagram of FridgeFuh ValleryNo ratings yet
- SD Card Upgrade Operating InstructionDocument3 pagesSD Card Upgrade Operating InstructionFuh ValleryNo ratings yet
- 8051 DatasheetDocument140 pages8051 DatasheetDharishNo ratings yet
- Core8051 DsDocument41 pagesCore8051 DsMinh Trí KnightNo ratings yet
- RefrigerationDocument6 pagesRefrigerationJerin CyriacNo ratings yet
- Cummins Installation, Operations & Maintenance Manual PDFDocument74 pagesCummins Installation, Operations & Maintenance Manual PDFMatthew Butler71% (17)
- Reactive Power and Voltage ControlDocument2 pagesReactive Power and Voltage ControlFuh ValleryNo ratings yet
- Compressor Diagram of FridgeDocument1 pageCompressor Diagram of FridgeFuh ValleryNo ratings yet
- Design Construction Solar ChargerDocument6 pagesDesign Construction Solar Chargervlady_2009No ratings yet
- PIC Based Solar DC Power System with Supercapacitor and Sepic ConvertorDocument10 pagesPIC Based Solar DC Power System with Supercapacitor and Sepic ConvertorFuh ValleryNo ratings yet
- MINIMISING PENALTY INDUSTRIAL POWER CONSUMPTION APFCDocument2 pagesMINIMISING PENALTY INDUSTRIAL POWER CONSUMPTION APFCFuh ValleryNo ratings yet
- Microcontroller-Based Single-Phase Automatic Voltage RegulatorDocument5 pagesMicrocontroller-Based Single-Phase Automatic Voltage RegulatorFuh ValleryNo ratings yet
- Automatic Voltage Stabilizer - Syed Tahmid MahbubDocument21 pagesAutomatic Voltage Stabilizer - Syed Tahmid Mahbubjewel768100% (2)
- Hybrid Power Generation Using Solar and Wind EnergyDocument7 pagesHybrid Power Generation Using Solar and Wind EnergyFuh ValleryNo ratings yet
- Managing Information for Better DecisionsDocument12 pagesManaging Information for Better DecisionsTosin WilliamsNo ratings yet
- Fire Fighting LayoutDocument1 pageFire Fighting LayoutNoufal OthupurayilNo ratings yet
- Net HSMDocument4 pagesNet HSMJosé Tudela de la RosaNo ratings yet
- Aritco Home Lifts 2014 DEC en LDocument52 pagesAritco Home Lifts 2014 DEC en LBuzaareNo ratings yet
- PDF Ebook Pickle Things by Marc Brown Download BookDocument5 pagesPDF Ebook Pickle Things by Marc Brown Download BookCorissNo ratings yet
- Grade 9 ICT Network Configuration GuideDocument15 pagesGrade 9 ICT Network Configuration GuideMark Anthony Nieva RafalloNo ratings yet
- B2BDocument31 pagesB2BAjay MaheskaNo ratings yet
- Djdusty VideolistDocument302 pagesDjdusty VideolistgonduNo ratings yet
- MAIN Electrical Parts List: Parts Code Design LOC DescriptionDocument22 pagesMAIN Electrical Parts List: Parts Code Design LOC DescriptionJerzy DziewiczkiewiczNo ratings yet
- Tomtom Device ForensicsDocument5 pagesTomtom Device ForensicsSwaroop WaghadeNo ratings yet
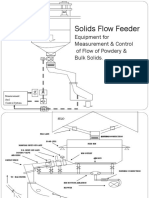
- Solids Flow Feeder Equipment for Precise Measurement & ControlDocument7 pagesSolids Flow Feeder Equipment for Precise Measurement & ControlAbhishek DuttaNo ratings yet
- 0806 02 Los5 - UgDocument124 pages0806 02 Los5 - Ugbmds kocakNo ratings yet
- 3.B Coating Maintenance CHEMCODocument51 pages3.B Coating Maintenance CHEMCOMeleti Meleti MeletiouNo ratings yet
- Learjet 45 Pilot Traning Manual Volumen 2Document539 pagesLearjet 45 Pilot Traning Manual Volumen 2Agustin Bernales88% (8)
- Swift 2002 Annual ReportDocument53 pagesSwift 2002 Annual ReportFlaviub23No ratings yet
- Samsung DRAM Module Handling Guide - 1128 - 10090119049407 PDFDocument9 pagesSamsung DRAM Module Handling Guide - 1128 - 10090119049407 PDFreza_azadNo ratings yet
- Green Finance For Green GrowthDocument24 pagesGreen Finance For Green GrowthSreejith BhattathiriNo ratings yet
- 2008-07-31 074935 04 CelicaDocument10 pages2008-07-31 074935 04 CelicaCesar Alarcón Solis100% (1)
- Ln26r71bd Ln-s2652d Ln26r71b Ln32r71bd LN s3252d DiagramaDocument261 pagesLn26r71bd Ln-s2652d Ln26r71b Ln32r71bd LN s3252d DiagramaVictor Julio AlvarezNo ratings yet
- SM-800.11 TypeM Plus ValvesDocument13 pagesSM-800.11 TypeM Plus ValvesAdel AhmedNo ratings yet
- LTE UMTS GSM Network OptimizationDocument44 pagesLTE UMTS GSM Network OptimizationAvi Shetty100% (1)
- PDF 7758Document2 pagesPDF 7758José Antônio CardosoNo ratings yet
- Gas LiftDocument35 pagesGas LiftHìnhxămNơigóckhuấtTimAnh100% (1)
- Imageclass Lbp611cn 613cdw 2Document2 pagesImageclass Lbp611cn 613cdw 2Maulana Ikhwan SadikinNo ratings yet
- Text Programming Guide For iOSDocument106 pagesText Programming Guide For iOSPetr MánekNo ratings yet
- Ansi B 16.34Document22 pagesAnsi B 16.34Vinoth Rajendra100% (2)
- Environmental Science Course Project-1Document27 pagesEnvironmental Science Course Project-1vaishnaviNo ratings yet
- 6.unit I 2 MarksDocument3 pages6.unit I 2 MarksprasanthprpNo ratings yet
- MCQ - QuestionsTM P-1 PDFDocument8 pagesMCQ - QuestionsTM P-1 PDFRislan MohammedNo ratings yet
- 300G IM SettingsSheets 20160122Document27 pages300G IM SettingsSheets 20160122zeljkoradaNo ratings yet
- Chip War: The Quest to Dominate the World's Most Critical TechnologyFrom EverandChip War: The Quest to Dominate the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (227)
- iPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XFrom EverandiPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XRating: 3 out of 5 stars3/5 (2)
- CompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102From EverandCompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Rating: 5 out of 5 stars5/5 (2)
- Chip War: The Fight for the World's Most Critical TechnologyFrom EverandChip War: The Fight for the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (82)
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002From EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Rating: 5 out of 5 stars5/5 (1)
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- Amazon Web Services (AWS) Interview Questions and AnswersFrom EverandAmazon Web Services (AWS) Interview Questions and AnswersRating: 4.5 out of 5 stars4.5/5 (3)
- Dancing with Qubits: How quantum computing works and how it can change the worldFrom EverandDancing with Qubits: How quantum computing works and how it can change the worldRating: 5 out of 5 stars5/5 (1)
- Model-based System and Architecture Engineering with the Arcadia MethodFrom EverandModel-based System and Architecture Engineering with the Arcadia MethodNo ratings yet
- Hacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxFrom EverandHacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxNo ratings yet
- Creative Selection: Inside Apple's Design Process During the Golden Age of Steve JobsFrom EverandCreative Selection: Inside Apple's Design Process During the Golden Age of Steve JobsRating: 4.5 out of 5 stars4.5/5 (49)
- iPhone Photography: A Ridiculously Simple Guide To Taking Photos With Your iPhoneFrom EverandiPhone Photography: A Ridiculously Simple Guide To Taking Photos With Your iPhoneNo ratings yet
- Computer Science: A Concise IntroductionFrom EverandComputer Science: A Concise IntroductionRating: 4.5 out of 5 stars4.5/5 (14)
- 2018 (40+) Best Free Apps for Kindle Fire Tablets: +Simple Step-by-Step Guide For New Kindle Fire UsersFrom Everand2018 (40+) Best Free Apps for Kindle Fire Tablets: +Simple Step-by-Step Guide For New Kindle Fire UsersNo ratings yet
- The No Bull$#!£ Guide to Building Your Own PC: No Bull GuidesFrom EverandThe No Bull$#!£ Guide to Building Your Own PC: No Bull GuidesNo ratings yet