You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- CS 6206 Final Exam PDFDocument11 pagesCS 6206 Final Exam PDFOMyNo ratings yet
- Cyber Crimes in IndiaDocument11 pagesCyber Crimes in Indiaanoos04100% (1)
- IBM Design Thinking Field Guide Watson Build v3.5 - AcDocument29 pagesIBM Design Thinking Field Guide Watson Build v3.5 - Acccchan100% (2)
- CSC099 Chapter 1 Introduction to Computer and Programming LanguagesDocument54 pagesCSC099 Chapter 1 Introduction to Computer and Programming LanguagesAbdul Ashraf RasidNo ratings yet
- Training and Placement Cell AbstractDocument5 pagesTraining and Placement Cell AbstractTelika Ramu100% (1)
- Comparing The Onset of Cybersickness Using The Oculus RiftDocument12 pagesComparing The Onset of Cybersickness Using The Oculus RiftGeorge AndriiciucNo ratings yet
- Team Fortress in VR GDCDocument42 pagesTeam Fortress in VR GDCErnest GonzalesNo ratings yet
- Oculus Rift Virtual Reality Visualization With The Oculus RiftDocument4 pagesOculus Rift Virtual Reality Visualization With The Oculus RiftGeorge AndriiciucNo ratings yet
- Long-Term VR Self-Experiment Report on Perception, Behavior & CognitionDocument4 pagesLong-Term VR Self-Experiment Report on Perception, Behavior & CognitionGeorge AndriiciucNo ratings yet
- VR Rendering Challenges of VR PDFDocument21 pagesVR Rendering Challenges of VR PDFGeorge AndriiciucNo ratings yet
- HTC Vivid Att User GuideDocument164 pagesHTC Vivid Att User GuideryumacleodNo ratings yet
- Oculus LavYerKatAnt14Document8 pagesOculus LavYerKatAnt14Don ReloNo ratings yet
- Oculus Rift BP PDFDocument36 pagesOculus Rift BP PDFGeorge AndriiciucNo ratings yet
- Vive PRE User Guide PDFDocument28 pagesVive PRE User Guide PDFZane ArakiNo ratings yet
- Aux in Retrofit E60Document9 pagesAux in Retrofit E60George AndriiciucNo ratings yet
- Pri Dlbt1617693enDocument7 pagesPri Dlbt1617693enC-TecNo ratings yet
- FANUC CNC Maintenance Manual SectionsDocument2 pagesFANUC CNC Maintenance Manual Sectionsmcantraks17No ratings yet
- Beyond A+.oDocument307 pagesBeyond A+.oalexmyatooNo ratings yet
- P630iDocument316 pagesP630iJamal AldwakeNo ratings yet
- Fisher 500BDocument8 pagesFisher 500BGam Ma ZacNo ratings yet
- Top Vision UPS: User ManualDocument31 pagesTop Vision UPS: User ManualMohammed Abo ShedegNo ratings yet
- Volvo XC90 AccessoryDocument4 pagesVolvo XC90 AccessoryTeravut SuwansawaipholNo ratings yet
- Cluster DecDocument422 pagesCluster Decsts100No ratings yet
- Fireman Lift NoteDocument3 pagesFireman Lift Notesoumya garaiNo ratings yet
- Valentine Fortune Teller BOYDocument7 pagesValentine Fortune Teller BOYJudith Maslach CirincioneNo ratings yet
- HP iLO4 Command Line Interface (CLI) Guide and Cheatsheet With Examples - GoLinuxHubDocument15 pagesHP iLO4 Command Line Interface (CLI) Guide and Cheatsheet With Examples - GoLinuxHubAHMED LAAGUIDNo ratings yet
- Data Analytics For Accounting 1st Edition Richardson Test BankDocument17 pagesData Analytics For Accounting 1st Edition Richardson Test Bankflorenceronaldoxo0100% (25)
- The Five Steps of Gemba KAIZENDocument1 pageThe Five Steps of Gemba KAIZENAbhinaya RamdassNo ratings yet
- IMO 2nd Level Result - Science Olympiad Foundation (SOF) PDFDocument3 pagesIMO 2nd Level Result - Science Olympiad Foundation (SOF) PDFkvinodan730% (2)
- Joint Venture ReportDocument15 pagesJoint Venture ReportRavi MalhotraNo ratings yet
- Service Manual: STR-DA5300ESDocument328 pagesService Manual: STR-DA5300ESJimmy ThompsonNo ratings yet
- Manual Kubota Serie Ed1105 - 30Document2 pagesManual Kubota Serie Ed1105 - 30Alvaro Escalona GtzNo ratings yet
- Proguard SFDocument1 pageProguard SFahmedyahea181No ratings yet
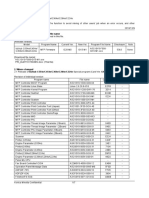
- B04 Management, Law, Quality: Standard Number Standard Title Price ( )Document96 pagesB04 Management, Law, Quality: Standard Number Standard Title Price ( )Akbar ShaikNo ratings yet
- RWYL202 Remote Control Roller Explosive ViewDocument23 pagesRWYL202 Remote Control Roller Explosive ViewBrian EzequielNo ratings yet
- 808D 808D ADV Diagnostics Man 0117 en-USDocument602 pages808D 808D ADV Diagnostics Man 0117 en-USParlog DamianNo ratings yet
- Subir Bandyopadhyay Lecture1-Đã Chuyển ĐổiDocument49 pagesSubir Bandyopadhyay Lecture1-Đã Chuyển ĐổiDuong NguyenNo ratings yet
- TN40CMSP002 2 0 2Document192 pagesTN40CMSP002 2 0 2emmasustechNo ratings yet
- Experimental Performance RubricsDocument3 pagesExperimental Performance RubricsAhmed AliNo ratings yet
- Annotated Bibliography Assignment 2Document5 pagesAnnotated Bibliography Assignment 2Kam MoshierNo ratings yet