You might also like
- ZXDC48 FB101 Lithium-Ion Battery User Manual V1.0Document43 pagesZXDC48 FB101 Lithium-Ion Battery User Manual V1.0Luis Cruz96% (24)
- Induction Balance Metal Detector PDFDocument6 pagesInduction Balance Metal Detector PDFPerșinaru Robert100% (2)
- Induction Balance Metal Detector PDFDocument6 pagesInduction Balance Metal Detector PDFPerșinaru Robert100% (2)
- Example of Annual Audit Planning Work ProgramDocument2 pagesExample of Annual Audit Planning Work Programrindwa100% (1)
- The Incredible 5 Cent Sugar RocketDocument47 pagesThe Incredible 5 Cent Sugar Rocketobx4everNo ratings yet
- Excavation and Trenching Implementation PlanDocument29 pagesExcavation and Trenching Implementation Planracing.phreakNo ratings yet
- Phaser IB Metal DetectorDocument6 pagesPhaser IB Metal DetectorelizaldesfNo ratings yet
- Metal DetectorsDocument54 pagesMetal DetectorsAchmad Fadhillah Kurniawan100% (2)
- Metal DetectorDocument24 pagesMetal Detectorramlala2591100% (1)
- P10 MetalDet G4 FinalReportDocument15 pagesP10 MetalDet G4 FinalReportherrberk100% (1)
- Basic Circuitry of Metal DetectionDocument6 pagesBasic Circuitry of Metal DetectionBalbalaManiukNo ratings yet
- Stuart1 150Document6 pagesStuart1 150Rafael PiccoNo ratings yet
- Metal DetectorDocument3 pagesMetal DetectorRoberto Managay Benitez Jr.67% (3)
- Basic Circuitry of Metal DetectionDocument30 pagesBasic Circuitry of Metal Detectionramesh_jain_kirtikaNo ratings yet
- Basic Circuitry of Metal DetectionDocument45 pagesBasic Circuitry of Metal Detectionverd leonardNo ratings yet
- BFO TheoryDocument9 pagesBFO TheoryJCMNo ratings yet
- Minor Project Report Metal Detector Electrical Engineering (Uee001)Document5 pagesMinor Project Report Metal Detector Electrical Engineering (Uee001)Divesh Aggarwal100% (1)
- Power Point1..metal Detector..final1Document27 pagesPower Point1..metal Detector..final1Ziad100% (1)
- Water Level AlarmDocument22 pagesWater Level AlarmDinesh KumarNo ratings yet
- Cheesemd 1Document5 pagesCheesemd 1Guillermo Gómez MiñonesNo ratings yet
- Feedback and Control SystemDocument12 pagesFeedback and Control SystemFritz Fatiga100% (2)
- BFO Metal Detector (Rachel and Steve Hageman)Document2 pagesBFO Metal Detector (Rachel and Steve Hageman)Leo Corrientes100% (1)
- Metal Detector Parts ListDocument4 pagesMetal Detector Parts ListAlex AnthonyNo ratings yet
- BuccaneerDocument7 pagesBuccaneerAlessandro GonzálezNo ratings yet
- Construction of A Beat Frequency Oscillator Metal DetectorDocument3 pagesConstruction of A Beat Frequency Oscillator Metal Detectorlakshmanakumarchand100% (3)
- 100 IC CircuitsDocument60 pages100 IC CircuitssabNo ratings yet
- Deep Soil Metal Detector CircuitDocument17 pagesDeep Soil Metal Detector Circuitjo100% (1)
- DIY Metal DetectorDocument3 pagesDIY Metal DetectorsNo ratings yet
- Metal Detector Using Difference Resonator: AbstractDocument4 pagesMetal Detector Using Difference Resonator: AbstractAshit SinghNo ratings yet
- Fluxgate Magnetometer CCTDocument9 pagesFluxgate Magnetometer CCTLorenzo D'AmbrosiNo ratings yet
- DLDDocument5 pagesDLDÏñtïsãm ÄhmãdNo ratings yet
- Magnum Metal LocatorDocument11 pagesMagnum Metal Locatorercan dizdar100% (1)
- Metal DetectorDocument4 pagesMetal DetectorManu Krishnan MagvitronNo ratings yet
- Metal Detector HomemadeDocument7 pagesMetal Detector HomemadeCoevic100% (1)
- Metal Detector Circuit ReportDocument4 pagesMetal Detector Circuit Reportpratik kushwahaNo ratings yet
- Metal Detector CircuitDocument7 pagesMetal Detector CircuitRiya singhNo ratings yet
- Como Trabaja El LNB DigitalDocument8 pagesComo Trabaja El LNB DigitalCarlos A. Galeano A.No ratings yet
- Optimization Design of Colpitts Oscillator For Active INDUCTION BALANCE METAL DETECTIONDocument6 pagesOptimization Design of Colpitts Oscillator For Active INDUCTION BALANCE METAL DETECTIONLAKIS PAVNo ratings yet
- Chapter 4 ElectronicDocument45 pagesChapter 4 ElectronicThomas CheahNo ratings yet
- Metal Detector Circuit Using Single TransistorDocument7 pagesMetal Detector Circuit Using Single TransistorJatin PahujaNo ratings yet
- Pixman 2Document8 pagesPixman 2MR XNo ratings yet
- Metal Discriminator: Girish O Pranav AgarwalDocument8 pagesMetal Discriminator: Girish O Pranav AgarwallotarrNo ratings yet
- Project ReportDocument9 pagesProject ReportBinshi GopinadanNo ratings yet
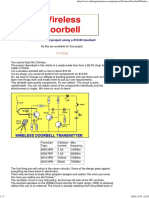
- Wireless DoorbellDocument7 pagesWireless DoorbellAgnes NagyNo ratings yet
- Repairing Switching Power SupplyDocument16 pagesRepairing Switching Power SupplyAnonymous ulmnz5yT67% (3)
- TGSL - 101 - Part1Document25 pagesTGSL - 101 - Part1sorinn1987No ratings yet
- Abstract:: Project ObjectiveDocument6 pagesAbstract:: Project ObjectiveRouge ArtistNo ratings yet
- Ap-I UltrasonicsDocument40 pagesAp-I Ultrasonicsapi-328718591No ratings yet
- UltrasonicsDocument39 pagesUltrasonicsanilm130484meNo ratings yet
- Lich King Chorus PDFDocument21 pagesLich King Chorus PDFMacgy YeungNo ratings yet
- Project Synopsis ON Metal Detector With Arduino Bachelor of Engineering IN Department of Electronics TelecommunicationDocument7 pagesProject Synopsis ON Metal Detector With Arduino Bachelor of Engineering IN Department of Electronics TelecommunicationPraveen SinghNo ratings yet
- Metal Detector CircuitDocument17 pagesMetal Detector CircuitKaos Polos Nakira0% (2)
- Metal Detector ReportDocument13 pagesMetal Detector ReportAnonymous ytZsBOVNo ratings yet
- Sismic Sensor CircuitDocument1 pageSismic Sensor CircuitArun Kumar YadavNo ratings yet
- Simple Metal DetectorDocument17 pagesSimple Metal DetectorBambang Gastomo75% (4)
- Metal DetectorDocument9 pagesMetal Detectorfelix100% (1)
- Cheap and Efficient Metal Detector: January 2017Document5 pagesCheap and Efficient Metal Detector: January 2017Wael Abdelgadir AbdelazizNo ratings yet
- Student Presentation 9 Metal DetectorsDocument7 pagesStudent Presentation 9 Metal DetectorssuperthambiNo ratings yet
- Music Circuits, Practical ElectronicDocument9 pagesMusic Circuits, Practical Electronicplatastur100% (2)
- Analog Mini Project Group2Document21 pagesAnalog Mini Project Group2Threefold CordNo ratings yet
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1From EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Rating: 4.5 out of 5 stars4.5/5 (3)
- Diode, Transistor & Fet Circuits Manual: Newnes Circuits Manual SeriesFrom EverandDiode, Transistor & Fet Circuits Manual: Newnes Circuits Manual SeriesRating: 4.5 out of 5 stars4.5/5 (7)
- University of Pardubice - 8th International Seminar NTREM (2005)Document933 pagesUniversity of Pardubice - 8th International Seminar NTREM (2005)BalbalaManiukNo ratings yet
- University of Pardubice - 14th International Seminar NTREM (2011) PDFDocument1,062 pagesUniversity of Pardubice - 14th International Seminar NTREM (2011) PDFBalbalaManiukNo ratings yet
- University of Pardubice - 9th International Seminar NTREM (2006)Document822 pagesUniversity of Pardubice - 9th International Seminar NTREM (2006)BalbalaManiukNo ratings yet
- Yoga Tablet 8-10 HMM en 20130916Document72 pagesYoga Tablet 8-10 HMM en 20130916BalbalaManiukNo ratings yet
- Whirlpool Awg 322Document7 pagesWhirlpool Awg 322BalbalaManiukNo ratings yet
- University of Pardubice - 6th International Seminar NTREM (2003)Document584 pagesUniversity of Pardubice - 6th International Seminar NTREM (2003)BalbalaManiukNo ratings yet
- Whirlpool Awg 322Document7 pagesWhirlpool Awg 322BalbalaManiukNo ratings yet
- Clarke 300Document11 pagesClarke 300MikeLoopNo ratings yet
- Magnum 1 CDocument2 pagesMagnum 1 CBalbalaManiukNo ratings yet
- Bike2015 EnglishDocument72 pagesBike2015 EnglishBalbalaManiukNo ratings yet
- 951 Soldering Flux Data SheetDocument2 pages951 Soldering Flux Data SheetBalbalaManiukNo ratings yet
- 951 Flux-Pen® SDS-EnglishDocument10 pages951 Flux-Pen® SDS-EnglishBalbalaManiukNo ratings yet
- AirLive WLA-5000APv3 ManualDocument77 pagesAirLive WLA-5000APv3 ManualBalbalaManiukNo ratings yet
- AirLive WLA-5000APv3 SpecSheetDocument35 pagesAirLive WLA-5000APv3 SpecSheetBalbalaManiukNo ratings yet
- Twin LoopDocument5 pagesTwin LoopBalbalaManiuk100% (1)
- SandbanksDocument9 pagesSandbanksVic ToguinzNo ratings yet
- TwoboxDocument4 pagesTwoboxEdmundo CisnerosNo ratings yet
- Shadow 300Document5 pagesShadow 300BalbalaManiukNo ratings yet
- Stuart1 150Document6 pagesStuart1 150Rafael PiccoNo ratings yet
- Pi 84Document5 pagesPi 84BalbalaManiukNo ratings yet
- Microcontroller P.I. Treasure HunterDocument8 pagesMicrocontroller P.I. Treasure HunterRitesh SharmaNo ratings yet
- Construcción de Detector de MetalesDocument12 pagesConstrucción de Detector de Metalesgerardo100% (2)
- Houn Dog 300Document4 pagesHoun Dog 300BalbalaManiuk100% (1)
- Eti549au 300Document6 pagesEti549au 300BalbalaManiukNo ratings yet
- Gold PicDocument6 pagesGold PicBalbalaManiukNo ratings yet
- HHV 1 P 5Document15 pagesHHV 1 P 5BalbalaManiukNo ratings yet
- Magnum1 0Document11 pagesMagnum1 0Michał SiwińskiNo ratings yet
- 10th Syllbus PDFDocument104 pages10th Syllbus PDFGagandeep KaurNo ratings yet
- S1 Mock 2Document13 pagesS1 Mock 2Abdulrahman HatemNo ratings yet
- Stas 500-2-80 RDocument4 pagesStas 500-2-80 RSzabolcs KovacsNo ratings yet
- 843-Artificial Intelligence-Xi XiiDocument11 pages843-Artificial Intelligence-Xi XiiPɾαƙԋყαƚ PαɳԃҽყNo ratings yet
- Certipur Certified Reference Material: Sodium Standard Solution 1000 MG/L NaDocument1 pageCertipur Certified Reference Material: Sodium Standard Solution 1000 MG/L NaJuan BenitezNo ratings yet
- Matrix Analysis of Networks: J. R. LucasDocument63 pagesMatrix Analysis of Networks: J. R. LucasNethmini SamarawickramaNo ratings yet
- Paragraph Completion Material 1Document5 pagesParagraph Completion Material 1d.jyr2xNo ratings yet
- BD Bactec Mgit 960 Mycobacteria Culture SystemDocument6 pagesBD Bactec Mgit 960 Mycobacteria Culture SystemHuguens DesrosiersNo ratings yet
- 2.talent Management New ChallengesDocument17 pages2.talent Management New ChallengesAlejandra AGNo ratings yet
- Accenture United Nations Global Compact IndexDocument4 pagesAccenture United Nations Global Compact IndexBlasNo ratings yet
- Assessment Center GuideDocument4 pagesAssessment Center GuidebilloobuttNo ratings yet
- The Impact of Employees' Commitment Towards Food Safety at Ayana Resort, BaliDocument58 pagesThe Impact of Employees' Commitment Towards Food Safety at Ayana Resort, Balirachelle agathaNo ratings yet
- Rotak: Downloaded From Manuals Search EngineDocument18 pagesRotak: Downloaded From Manuals Search EngineOvidiu BrinzanNo ratings yet
- Vocabulary Placement TestDocument3 pagesVocabulary Placement TestMonica Vergara MejiaNo ratings yet
- Electrical Service Minimum RequirmentDocument97 pagesElectrical Service Minimum RequirmentachniajosiNo ratings yet
- BA427 Chapter 7Document11 pagesBA427 Chapter 7Maloloy-on, JeromeNo ratings yet
- Current Office Phone Number Vijayawada, Andhra Pradesh (A.p.)Document11 pagesCurrent Office Phone Number Vijayawada, Andhra Pradesh (A.p.)Manoj Digi Loans100% (1)
- Action Research MethodDocument27 pagesAction Research MethodNiño Czar RaroNo ratings yet
- One Page Mistake ProofingDocument1 pageOne Page Mistake Proofingtuan mai vanNo ratings yet
- Florian1995, Mental HealthDocument9 pagesFlorian1995, Mental Healthade ubaidahNo ratings yet
- Banksy Responses Done With A Partner 655512Document122 pagesBanksy Responses Done With A Partner 655512api-569248887No ratings yet
- 82 - Engineering Mechanics Refresher SetDocument6 pages82 - Engineering Mechanics Refresher Setdevilene nayazakoNo ratings yet
- Dumisani Maths Prac AssignmentDocument6 pagesDumisani Maths Prac AssignmentDumisani Tawanda DubeNo ratings yet
- VRV Heat Recovery REYQ-XDocument20 pagesVRV Heat Recovery REYQ-XFrancisco LinaresNo ratings yet
- Week 1 - Intrduction To Nursing Research - StudentDocument24 pagesWeek 1 - Intrduction To Nursing Research - StudentWani GhootenNo ratings yet
- Define-Phase Yellow BeltDocument52 pagesDefine-Phase Yellow BeltBhadri NarayananNo ratings yet
- Chapter 2 Solutions - Power-Generation-OperationDocument11 pagesChapter 2 Solutions - Power-Generation-OperationKleilson Chagas50% (4)