You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- MEE322 Final Exam S20Document5 pagesMEE322 Final Exam S20Nabil SweidanNo ratings yet
- Ch. 3: Forward and Inverse Kinematics: KON 318E: Introduction To RoboticsDocument40 pagesCh. 3: Forward and Inverse Kinematics: KON 318E: Introduction To RoboticsDursun DurmasınNo ratings yet
- 08 Instruction Manul of Fluid Mechanics LabDocument71 pages08 Instruction Manul of Fluid Mechanics Labmichael1135100% (1)
- C 10 - Serviceability DeflectionsDocument27 pagesC 10 - Serviceability DeflectionsRekanNo ratings yet
- Size Effect of Concrete Members Applied With Exural Compressive StressesDocument25 pagesSize Effect of Concrete Members Applied With Exural Compressive StressesJohn WoodNo ratings yet
- Needle Roller BearingsDocument11 pagesNeedle Roller BearingsReyben RubioNo ratings yet
- Assignment Physics 01 012022Document2 pagesAssignment Physics 01 012022Trương Đức HiếuNo ratings yet
- LO2 Structural Mechanical Prop Metals PDFDocument41 pagesLO2 Structural Mechanical Prop Metals PDFChelle VillasisNo ratings yet
- Assignment 1 Mech 321 Properties and Failure of Materials Jan 2009Document2 pagesAssignment 1 Mech 321 Properties and Failure of Materials Jan 2009DSGNo ratings yet
- Mem511 Exam Q Okt 2022Document6 pagesMem511 Exam Q Okt 2022Nur Ayna SyafiqaNo ratings yet
- Rigid Pavement Design PDFDocument14 pagesRigid Pavement Design PDFvikashNo ratings yet
- Work Energy and PowerDocument42 pagesWork Energy and PowerKryschan CaditeNo ratings yet
- CZM Formulation and ABAQUSDocument44 pagesCZM Formulation and ABAQUSaravind kumarNo ratings yet
- APL104 F23 Tutorial 1Document5 pagesAPL104 F23 Tutorial 1md osamaNo ratings yet
- Handbook of Supersonic Aerodynamics Volume - 5 - Sec - 16Document84 pagesHandbook of Supersonic Aerodynamics Volume - 5 - Sec - 16maurizio.desio4992No ratings yet
- Lecture - Scalar Vector FieldsDocument4 pagesLecture - Scalar Vector FieldsMarlon BoucaudNo ratings yet
- Cam and Follower Final NotesDocument18 pagesCam and Follower Final NotesSexy IdolNo ratings yet
- Anchorage ZoneDocument13 pagesAnchorage ZoneVano AvonNo ratings yet
- Lesson 6Document51 pagesLesson 6Portia ShilengeNo ratings yet
- Thick Plate AnalysisDocument6 pagesThick Plate AnalysisJONAS NGNo ratings yet
- Lesson 1 - Intro To Thermo - Student-3Document3 pagesLesson 1 - Intro To Thermo - Student-3OreoDaChickenPlayz YTNo ratings yet
- CH10 Wave OpticsDocument105 pagesCH10 Wave OpticsAryan PatelNo ratings yet
- Electric Potential Energy and Electrical Potential KeyDocument2 pagesElectric Potential Energy and Electrical Potential Keyrendie bedolidoNo ratings yet
- VHJJJKDocument17 pagesVHJJJKKhanna Dhinesh100% (1)
- Fundamental of VibrationDocument17 pagesFundamental of VibrationMohammad Al BastakiNo ratings yet
- Vespel SCP 5000 Datasheet CurbellDocument2 pagesVespel SCP 5000 Datasheet CurbellVinaya Almane DattathreyaNo ratings yet
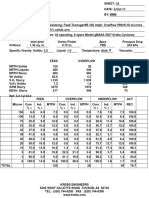
- Erdenet Concentrate Desliming - Alternate gMAX4 Simulation PDFDocument1 pageErdenet Concentrate Desliming - Alternate gMAX4 Simulation PDFolziitulga batboldNo ratings yet
- Emd ImpDocument7 pagesEmd ImpErAmolDhakaneNo ratings yet
- Structural Theory 1 (Method of Superposition)Document30 pagesStructural Theory 1 (Method of Superposition)acurvz2005No ratings yet