You might also like
- Optimal Economic Operation of Electric Power SystemsFrom EverandOptimal Economic Operation of Electric Power SystemsNo ratings yet
- Insulation Co-ordination in High-voltage Electric Power SystemsFrom EverandInsulation Co-ordination in High-voltage Electric Power SystemsRating: 4.5 out of 5 stars4.5/5 (5)
- PreviewpdfDocument26 pagesPreviewpdfjigyesh29No ratings yet
- FE Commissioning Policy - Field Engineer Package - Rev2Document55 pagesFE Commissioning Policy - Field Engineer Package - Rev2jtr194No ratings yet
- Relay Coordination 1 PDFDocument5 pagesRelay Coordination 1 PDFNikhil SainiNo ratings yet
- 007d Schneider Electric Reclosers Loop Automation Classic Intelligent 1 - 1Document31 pages007d Schneider Electric Reclosers Loop Automation Classic Intelligent 1 - 1César Bolaños QuirósNo ratings yet
- Power Quality ManagementDocument13 pagesPower Quality ManagementAniruddh NagaNo ratings yet
- Current Transformer - Electrical Notes & ArticlesDocument35 pagesCurrent Transformer - Electrical Notes & ArticlesBlake100% (1)
- Distribution Feeder Automation SystemDocument4 pagesDistribution Feeder Automation Systemfrwbtnbtyni85653No ratings yet
- Sheath Circulating CurrentDocument5 pagesSheath Circulating CurrentAhmed H. HassanNo ratings yet
- 01 IntroductionDocument1 page01 Introductionapi-3697422No ratings yet
- Adaptive Relaying For Power System Protection: Department of Electrical and Electronics EngineeringDocument12 pagesAdaptive Relaying For Power System Protection: Department of Electrical and Electronics EngineeringJayanth BhargavNo ratings yet
- Motor de Induccion ETAPDocument20 pagesMotor de Induccion ETAPgabriel_87No ratings yet
- Winter 2011Document128 pagesWinter 2011baoHVLABNo ratings yet
- Distribution AutomationDocument63 pagesDistribution Automationn anushaNo ratings yet
- GET-7203 - Art of Protective RelayingDocument19 pagesGET-7203 - Art of Protective RelayingArnab BanerjeeNo ratings yet
- Switchgear and Protection: Seminar Adaptive RelayingDocument16 pagesSwitchgear and Protection: Seminar Adaptive RelayingrajumohandasNo ratings yet
- Improve Reliability with Numerical RelayingDocument49 pagesImprove Reliability with Numerical RelayingBhargav PandyaNo ratings yet
- Presenation ON: Insulation Cordination AND Insualtion Level of Substation EquipmentDocument16 pagesPresenation ON: Insulation Cordination AND Insualtion Level of Substation EquipmentshreyaNo ratings yet
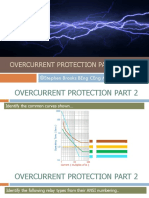
- 12.1 Overcurrent Protection Part 2 Quiz PDFDocument10 pages12.1 Overcurrent Protection Part 2 Quiz PDFfaycelNo ratings yet
- Trafo Testing SummDocument16 pagesTrafo Testing SummSubhransu MohapatraNo ratings yet
- Distribution Automation NewDocument21 pagesDistribution Automation Newvenki249No ratings yet
- CIGRE - Paris-Application of Partial Discharge Diagnostic Technique On High Voltage Cable Sealing EndsDocument9 pagesCIGRE - Paris-Application of Partial Discharge Diagnostic Technique On High Voltage Cable Sealing EndsKarthik SriramakavachamNo ratings yet
- 0 - A High-Voltage Fuse Tutorial and Application GuideDocument35 pages0 - A High-Voltage Fuse Tutorial and Application GuideFerran MunyósNo ratings yet
- EventAnalysis TutorilaDocument10 pagesEventAnalysis TutorilaLovemore MutikaniNo ratings yet
- Digital RelaysDocument12 pagesDigital RelaysAbdullah Yahya0% (1)
- EPRI RedBook PDFDocument2 pagesEPRI RedBook PDFgyanendra_vatsa4380100% (2)
- Protecting Power Systems For Engineers - PROT 401Document30 pagesProtecting Power Systems For Engineers - PROT 401Jorge Corrales BarrazaNo ratings yet
- Lesson PlanDocument5 pagesLesson PlanArvind YadavNo ratings yet
- Reb 611Document76 pagesReb 611Adil KhanNo ratings yet
- Registration: Scripting in Powerfactory With PythonDocument2 pagesRegistration: Scripting in Powerfactory With PythonAndres Caviedes ArevaloNo ratings yet
- Descriptive Bulletin 242-32Document25 pagesDescriptive Bulletin 242-32mashan98No ratings yet
- Tap Changer: Voltage ConsiderationsDocument4 pagesTap Changer: Voltage Considerations1balamanianNo ratings yet
- Arc Flash IEI Reduction 3000DB0810R608 PDFDocument8 pagesArc Flash IEI Reduction 3000DB0810R608 PDFShahrizal ErlanggaNo ratings yet
- Seminar Report on Smart Grid Components and FeaturesDocument25 pagesSeminar Report on Smart Grid Components and FeaturesArshdeepNo ratings yet
- DVR Seminar: Power Quality ImprovementDocument15 pagesDVR Seminar: Power Quality ImprovementKartheek ReddyNo ratings yet
- High Voltage Circuit Breakers Design and Applications 2nd Edition Revised and Expanded by Ruben D. GarzonDocument474 pagesHigh Voltage Circuit Breakers Design and Applications 2nd Edition Revised and Expanded by Ruben D. GarzonBenjamin OnyiaNo ratings yet
- Scada in Power Distribution SystemsDocument10 pagesScada in Power Distribution SystemsMike AjayiNo ratings yet
- Trafo Spec PDFDocument56 pagesTrafo Spec PDFMohammad Fadhil KoesputraNo ratings yet
- Travelling Wave Fault Location: Double Ended Accurate Fault Location for Transmission LinesDocument54 pagesTravelling Wave Fault Location: Double Ended Accurate Fault Location for Transmission LinesSatria RizkyNo ratings yet
- Arc Guard AbbDocument9 pagesArc Guard AbbsantoshkumarNo ratings yet
- Distribution AutomationDocument41 pagesDistribution AutomationFong FongNo ratings yet
- 1MRK511311-UEN - en Technical Manual Bay Control REC670 2.0 IECDocument1,124 pages1MRK511311-UEN - en Technical Manual Bay Control REC670 2.0 IECPhuongThao NguyenNo ratings yet
- The Restricted Earth Fault Relay Operation: Impact of Current Transformer Knee Point VoltagesDocument5 pagesThe Restricted Earth Fault Relay Operation: Impact of Current Transformer Knee Point VoltagesPradeep_VashistNo ratings yet
- 10 Unit ProtectionDocument18 pages10 Unit ProtectionSristick100% (1)
- Elum Energy Monitoring & Control Solutions for Solar Hybrid PlantsDocument17 pagesElum Energy Monitoring & Control Solutions for Solar Hybrid PlantsCyrilColinNo ratings yet
- Vector Multi-Meter Performs with Color DisplayDocument8 pagesVector Multi-Meter Performs with Color DisplayTonia GlennNo ratings yet
- K - Factor EarthingDocument13 pagesK - Factor EarthingShrikant KajaleNo ratings yet
- ST2451Document37 pagesST2451Abhishek PrakashNo ratings yet
- Distribution AutomationDocument26 pagesDistribution Automationd2electrifiers100% (1)
- Power Network Protection and Automation GuideDocument152 pagesPower Network Protection and Automation GuidegirishvNo ratings yet
- Wide Area ProtectionDocument27 pagesWide Area ProtectionRamesh KannanNo ratings yet
- Smart Grid in TransmissionDocument46 pagesSmart Grid in TransmissionAnil PalamwarNo ratings yet
- Grounding TransformerDocument8 pagesGrounding TransformerJoniNo ratings yet
- Diagnosis of The Short Circuit Duty of Power TransformersDocument6 pagesDiagnosis of The Short Circuit Duty of Power TransformerscisnatelNo ratings yet
- AREVA Relay - ListDocument8 pagesAREVA Relay - ListDheen MeeranNo ratings yet
- TerminologyDocument12 pagesTerminologyapi-3769988No ratings yet
- Appendix 2 - ANSI&IEC Relay SymbolsDocument2 pagesAppendix 2 - ANSI&IEC Relay Symbolsapi-3697422100% (2)
- 20-Protection of AC Elec RailDocument18 pages20-Protection of AC Elec RailSristick100% (3)
- 17-Generator and Generator Transf ProtDocument35 pages17-Generator and Generator Transf ProtSristick100% (7)
- 25-Distribution System AutomationDocument12 pages25-Distribution System AutomationSristick100% (3)
- 24-Substation Control and AutomationDocument20 pages24-Substation Control and AutomationSristick90% (10)
- 21-Relay Testing and CommissioningDocument28 pages21-Relay Testing and CommissioningSristick100% (4)
- 23 Power QualityDocument11 pages23 Power QualitySristick100% (1)
- 22-Power Systems MeasurementsDocument11 pages22-Power Systems Measurementsapi-3769988No ratings yet
- 18-Industrial and CommercialDocument20 pages18-Industrial and CommercialSristick100% (3)
- 19-AC Motor ProtectionDocument16 pages19-AC Motor ProtectionSristick100% (7)
- 10 Unit ProtectionDocument18 pages10 Unit ProtectionSristick100% (1)
- 14 Auto ReclosingDocument14 pages14 Auto ReclosingSristick100% (6)
- 16-Transformer and Transformer Feeder ProtDocument26 pages16-Transformer and Transformer Feeder ProtSristick100% (4)
- 04 Fault CalculationsDocument15 pages04 Fault Calculationsapi-3750225100% (1)
- 15 Busbar ProtectionDocument21 pages15 Busbar ProtectionSristick100% (8)
- 13-Protection of Complex TransmissionDocument16 pages13-Protection of Complex TransmissionSristick100% (2)
- 05 Equivalent CircuitsDocument32 pages05 Equivalent CircuitsSristick100% (1)
- 11 Distance ProtectionDocument22 pages11 Distance ProtectionSristick100% (1)
- 09-Overcurrent ProtectionDocument30 pages09-Overcurrent ProtectionSristick83% (6)
- 12-Distance Protection SchemesDocument9 pages12-Distance Protection SchemesSristick100% (1)
- 08-Protection Signalling and TrippingDocument10 pages08-Protection Signalling and TrippingSristick100% (2)
- 03 Fundamental TheoryDocument13 pages03 Fundamental TheoryPaul Alonso GonzálezNo ratings yet
- 06-Current and VoltageDocument19 pages06-Current and VoltageSristick100% (2)
- 01 IntroductionDocument1 page01 Introductionapi-3697422No ratings yet
- Protection FundamentalsDocument12 pagesProtection FundamentalsGeorge AsuncionNo ratings yet
- FM1188 Product Briefv 1Document2 pagesFM1188 Product Briefv 1ahmad104No ratings yet
- Autopal Group Company Overview and ProductsDocument12 pagesAutopal Group Company Overview and Productssourabh singh tomerNo ratings yet
- PIC16F84 Heart Rate Monitor Display on LCDDocument7 pagesPIC16F84 Heart Rate Monitor Display on LCDJayanta PaulNo ratings yet
- CUE Patch Notes 1.16.42Document1 pageCUE Patch Notes 1.16.42MrbudakbaekNo ratings yet
- DSA00358975Document674 pagesDSA00358975Bhadreshkumar SharmaNo ratings yet
- Facial Recognition Door Security System Using Raspberry PiDocument41 pagesFacial Recognition Door Security System Using Raspberry PiAnonymous UHfQqEHDIENo ratings yet
- DSI 700 Control Spec PDFDocument3 pagesDSI 700 Control Spec PDFMARCO PEREZNo ratings yet
- K24 Power Block DiagramDocument81 pagesK24 Power Block DiagramiseesongsNo ratings yet
- Operating Manual - PQX 571 and PQX 572 Parametric EqualizerDocument12 pagesOperating Manual - PQX 571 and PQX 572 Parametric EqualizerAditiya Nugraha JatiNo ratings yet
- Multimedia Systems ExplainedDocument9 pagesMultimedia Systems ExplainedThomas KimNo ratings yet
- 318 Series of Decoders: Comprehensive Guide to Features and SpecificationsDocument14 pages318 Series of Decoders: Comprehensive Guide to Features and SpecificationsHarshit DuaNo ratings yet
- OMEGA LTD Commercial Offer QuartzDocument2 pagesOMEGA LTD Commercial Offer QuartzAgung SuryadiNo ratings yet
- Cable Fault LocationDocument29 pagesCable Fault Locationmahmoud MotamediNo ratings yet
- CompilationDocument23 pagesCompilationChester MinguilloNo ratings yet
- Nr-220206 Control SystemsDocument8 pagesNr-220206 Control SystemsSrinivasa Rao G100% (1)
- Variador de FrecuenciaDocument105 pagesVariador de FrecuenciaAlex Pilcolora MendozaNo ratings yet
- 802-11ac Demystified PDFDocument6 pages802-11ac Demystified PDFJose AngelNo ratings yet
- ADU4518R3Document2 pagesADU4518R3Nuno FernandesNo ratings yet
- DELL - Precision-390 - Setup Guide - En-Us PDFDocument190 pagesDELL - Precision-390 - Setup Guide - En-Us PDFDimitris DimitriouNo ratings yet
- Manual - Return Loss MeasurementsDocument17 pagesManual - Return Loss MeasurementsbhopevishalNo ratings yet
- A Frequency-Fixed SOGI-Based PLL For Single-PhaseDocument7 pagesA Frequency-Fixed SOGI-Based PLL For Single-PhasedilrubaNo ratings yet
- Tertiary Windings in Autotransformers - When Needed and Proper SizingDocument1 pageTertiary Windings in Autotransformers - When Needed and Proper Sizingravi474No ratings yet
- Operador PanasonicDocument96 pagesOperador PanasonicVilla Robert RamoaNo ratings yet
- Hytera Push2Talk TF515Document2 pagesHytera Push2Talk TF515Filip NedelkovskiNo ratings yet
- Transformer Ratio and Polarity Test: Experiment No. 3Document17 pagesTransformer Ratio and Polarity Test: Experiment No. 3Raf Mid-dayNo ratings yet
- ABB DCS FF Loop Power WiringDocument16 pagesABB DCS FF Loop Power WiringMahesh ChaudhariNo ratings yet
- Interfacing A Texas Instruments PCM1725 Digital To Analog ConverterDocument4 pagesInterfacing A Texas Instruments PCM1725 Digital To Analog ConverterJennifer NealNo ratings yet
- 2nd SemDocument7 pages2nd SemMani YarasanNo ratings yet
- Peak Detector & Zero Crossing DetectorDocument8 pagesPeak Detector & Zero Crossing DetectorSơn Trần YNo ratings yet
- ZXMN 6 A 07 FtaDocument8 pagesZXMN 6 A 07 FtaFakhri AliNo ratings yet