You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Case 1088 Repair Manual (Crawler Excavator) PDFDocument971 pagesCase 1088 Repair Manual (Crawler Excavator) PDFrida100% (7)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Ul 854 - 2014 PDFDocument64 pagesUl 854 - 2014 PDFDouglasNo ratings yet
- MANUAL Vdocuments - Site FG Wilson P88e1Document287 pagesMANUAL Vdocuments - Site FG Wilson P88e1eletronica55100% (2)
- Energy Manipulation and MeditationDocument6 pagesEnergy Manipulation and Meditationapi-246292178100% (1)
- Chilled Water Pipe Insulation Method StatementDocument2 pagesChilled Water Pipe Insulation Method StatementGündoğdu Akın75% (4)
- Electrical Machine DrawingDocument4 pagesElectrical Machine DrawingSristickNo ratings yet
- MosfetDocument13 pagesMosfetSristick100% (3)
- 20-Protection of AC Elec RailDocument18 pages20-Protection of AC Elec RailSristick100% (3)
- 16-Transformer and Transformer Feeder ProtDocument26 pages16-Transformer and Transformer Feeder ProtSristick100% (4)
- 24-Substation Control and AutomationDocument20 pages24-Substation Control and AutomationSristick90% (10)
- 15 Busbar ProtectionDocument21 pages15 Busbar ProtectionSristick100% (8)
- 22-Power Systems MeasurementsDocument11 pages22-Power Systems Measurementsapi-3769988No ratings yet
- 25-Distribution System AutomationDocument12 pages25-Distribution System AutomationSristick100% (3)
- 23 Power QualityDocument11 pages23 Power QualitySristick100% (1)
- 21-Relay Testing and CommissioningDocument28 pages21-Relay Testing and CommissioningSristick100% (4)
- 17-Generator and Generator Transf ProtDocument35 pages17-Generator and Generator Transf ProtSristick100% (7)
- 19-AC Motor ProtectionDocument16 pages19-AC Motor ProtectionSristick100% (7)
- 13-Protection of Complex TransmissionDocument16 pages13-Protection of Complex TransmissionSristick100% (2)
- 14 Auto ReclosingDocument14 pages14 Auto ReclosingSristick100% (6)
- 10 Unit ProtectionDocument18 pages10 Unit ProtectionSristick100% (1)
- 11 Distance ProtectionDocument22 pages11 Distance ProtectionSristick100% (1)
- 09-Overcurrent ProtectionDocument30 pages09-Overcurrent ProtectionSristick83% (6)
- 12-Distance Protection SchemesDocument9 pages12-Distance Protection SchemesSristick100% (1)
- 08-Protection Signalling and TrippingDocument10 pages08-Protection Signalling and TrippingSristick100% (2)
- 07-Relay TechnologyDocument13 pages07-Relay Technologyapi-3769988No ratings yet
- 01 IntroductionDocument1 page01 Introductionapi-3697422No ratings yet
- 06-Current and VoltageDocument19 pages06-Current and VoltageSristick100% (2)
- Power AmplifierDocument37 pagesPower AmplifierSristick100% (6)
- 05 Equivalent CircuitsDocument32 pages05 Equivalent CircuitsSristick100% (1)
- 114 Handy Formulae For Quantitative Aptitude ProblemsDocument12 pages114 Handy Formulae For Quantitative Aptitude ProblemsRaju.Konduru91% (69)
- ThyristorDocument10 pagesThyristorSristick100% (2)
- Protection FundamentalsDocument12 pagesProtection FundamentalsGeorge AsuncionNo ratings yet
- Frequncy SpectrumDocument2 pagesFrequncy SpectrumSristick100% (1)
- Freq SpecDocument2 pagesFreq SpecSristickNo ratings yet
- TMX53DC 1607 121 (Drawings Electric)Document13 pagesTMX53DC 1607 121 (Drawings Electric)ChristianNo ratings yet
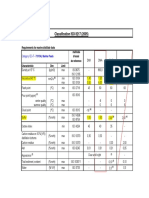
- Classification ISO 8217 (2005)Document5 pagesClassification ISO 8217 (2005)Salah JallaliNo ratings yet
- Survey of Tea Vendors 01Document2 pagesSurvey of Tea Vendors 01Sandeep SinghNo ratings yet
- Belimo Damper Actuator GM24A (Datasheet - 2007)Document2 pagesBelimo Damper Actuator GM24A (Datasheet - 2007)Ivan BriscoeNo ratings yet
- Evaluating The Effectiveness of Retrofitting An Existing Hospitality Buildingsia in 2010-2014Document8 pagesEvaluating The Effectiveness of Retrofitting An Existing Hospitality Buildingsia in 2010-2014International Journal of Innovative Science and Research TechnologyNo ratings yet
- Nikunj Sir FinalDocument32 pagesNikunj Sir FinalSakthi MuruganNo ratings yet
- The Design, Development and Future of Electric Vehicle: Prof. Eric ChengDocument18 pagesThe Design, Development and Future of Electric Vehicle: Prof. Eric ChengDeepak ChaurasiaNo ratings yet
- 6-Achs SPMT 210.12.4 G4 6-Axle SPMT 210.12.4 G4: Scheuerle-Fahrzeugfabrik GMBHDocument22 pages6-Achs SPMT 210.12.4 G4 6-Axle SPMT 210.12.4 G4: Scheuerle-Fahrzeugfabrik GMBHsrikanthc8550% (2)
- Elective 4 Module1Document27 pagesElective 4 Module1kentong compraNo ratings yet
- Mechanical OperationDocument14 pagesMechanical OperationThiyaga RajanNo ratings yet
- Led ComponentsDocument226 pagesLed Componentselcomsrl100% (1)
- Solar Refrigerator SpecsDocument4 pagesSolar Refrigerator SpecsFaisal Bin FaheemNo ratings yet
- Mahaan FoodsDocument49 pagesMahaan Foodsamandeep0001No ratings yet
- Production Range: EUROPIPE. The World Trusts UsDocument8 pagesProduction Range: EUROPIPE. The World Trusts UsIslam-Lotfi Hadj-ArabNo ratings yet
- Deepwater Horizon: Lessons in ProbabilitiesDocument15 pagesDeepwater Horizon: Lessons in ProbabilitiesZaman HaiderNo ratings yet
- Metalux Hbled Standard Efficiency Specsheet - Hbled ld5 24se W Unv l850 Ed2 UDocument5 pagesMetalux Hbled Standard Efficiency Specsheet - Hbled ld5 24se W Unv l850 Ed2 UDANIEL SALAZARNo ratings yet
- Syllabus of Diploma in Electrical EngineeringDocument17 pagesSyllabus of Diploma in Electrical EngineeringJoson Chan100% (1)
- Technical Assistance Consultant's Report: Energy Storage Option For Accelerating Renewable Energy PenetrationDocument364 pagesTechnical Assistance Consultant's Report: Energy Storage Option For Accelerating Renewable Energy PenetrationAlezsander RguezArNo ratings yet
- High Voltage Products Reliable Products - EN PDFDocument102 pagesHigh Voltage Products Reliable Products - EN PDFSiva ReddyNo ratings yet
- Introduction to Concrete Components and ClassificationDocument29 pagesIntroduction to Concrete Components and ClassificationUsama AliNo ratings yet
- 3 Instant Ways To Make Money From People Around You: by Oluwatoyin OmotosoDocument21 pages3 Instant Ways To Make Money From People Around You: by Oluwatoyin Omotosoobisesan phillipNo ratings yet
- Chapter 4 Unit 1 - Building With Nature SSDocument28 pagesChapter 4 Unit 1 - Building With Nature SSJeffreyNo ratings yet
- High Efficiency Battery Charger Using DC-DC ConverterDocument4 pagesHigh Efficiency Battery Charger Using DC-DC ConvertersanilNo ratings yet
- FFRT-100: Standard SpecificationsDocument2 pagesFFRT-100: Standard SpecificationsbibhansuNo ratings yet
- Pipe Sizes and Flow Rates for Air Flush DrillingDocument14 pagesPipe Sizes and Flow Rates for Air Flush DrillingzapspazNo ratings yet