You might also like
- Isolated Power Supply 30wDocument43 pagesIsolated Power Supply 30wchinnadurai20006034100% (1)
- Stepper Motor 28BYJ-48 Parameters: ULN2003 Driver BoardDocument1 pageStepper Motor 28BYJ-48 Parameters: ULN2003 Driver Boardmanoj madlur100% (1)
- Motor StepperDocument4 pagesMotor Stepperfavour ukpai100% (1)
- Rasberry PiDocument1 pageRasberry PiMulyadi100% (1)
- SSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.06XE Range Is 0.50mS To 2.50mSDocument15 pagesSSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.06XE Range Is 0.50mS To 2.50mSMardan Sabily Hasibuan100% (2)
- SSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.06XE Range Is 0.50mS To 2.50mSDocument15 pagesSSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.06XE Range Is 0.50mS To 2.50mSSergio Juan100% (1)
- Introdution To The DsPIC30FDocument17 pagesIntrodution To The DsPIC30Fboyluca100% (1)
- General USB Ver 1.1Document17 pagesGeneral USB Ver 1.1alex100% (1)
- Circuit Diagram Wireless TransmitterDocument17 pagesCircuit Diagram Wireless Transmitterumaiya1990100% (2)
- Full 66817Document8 pagesFull 66817EvaPuspitaSariNo ratings yet
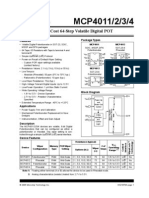
- MCP4011 Digital PotDocument60 pagesMCP4011 Digital Potundes100% (1)
- High Voltage Power Operational Amplifiers: Features DescriptionDocument6 pagesHigh Voltage Power Operational Amplifiers: Features DescriptionWaqas Ayub100% (1)
- Math Models Mixing TheoryDocument128 pagesMath Models Mixing TheoryHerb Norman SrNo ratings yet
- Size Reduction Techniques and EquipmentDocument66 pagesSize Reduction Techniques and Equipmentrefarmita24No ratings yet
- Octal Configurable Low/High Side Driver: DescriptionDocument18 pagesOctal Configurable Low/High Side Driver: DescriptionDan Esenther100% (1)
- 1.3inch OLED UserManualDocument7 pages1.3inch OLED UserManualReV100% (1)
- Computer SchematicDocument29 pagesComputer Schematicflywing100% (1)
- Pic TCP Ip StackDocument94 pagesPic TCP Ip StackHania Umar100% (1)
- Pic 18 1Document2 pagesPic 18 1alpesh100% (1)
- Speed Control of Single Phase Induction Motor Using AC Chopper by Asymmetrical PWM TechniqueDocument6 pagesSpeed Control of Single Phase Induction Motor Using AC Chopper by Asymmetrical PWM TechniqueGRD Journals100% (2)
- pc3sd21 eDocument17 pagespc3sd21 eeduardogallegos100% (1)
- List IC CampurDocument17 pagesList IC CampurFudin Safudin100% (2)
- Nex-Robotics 20x4 Serial LCD ModuleDocument9 pagesNex-Robotics 20x4 Serial LCD ModuleAshok Kumar100% (1)
- JHD12864Document15 pagesJHD12864dravife100% (1)
- Ucn 5821 ADocument7 pagesUcn 5821 ACelso Conceição100% (1)
- Fan Speed Controller and Fan Fault Detector Family: FeaturesDocument2 pagesFan Speed Controller and Fan Fault Detector Family: FeaturesShrikant A. Desai100% (1)
- ANCRCT-4 Precision Rectifier CircuitDocument1 pageANCRCT-4 Precision Rectifier Circuitramesh_br85100% (1)
- Lab LCDDocument6 pagesLab LCDJesus Cotrina100% (1)
- TP - The Compact Precisione0208Document20 pagesTP - The Compact Precisione0208Pradip GuptaNo ratings yet
- Idc To Box Header Adaptor: ReferenceDocument2 pagesIdc To Box Header Adaptor: ReferenceTariq Zuhluf100% (1)
- LCD 2 X 8Document4 pagesLCD 2 X 8dek_war100% (1)
- Guia Basica de Ejercicios-ProtonDocument59 pagesGuia Basica de Ejercicios-ProtonFatality Joseph100% (1)
- 4 Bit LCDDocument4 pages4 Bit LCDSuresh Kuruma100% (1)
- Lab2 MotorControl 08Document18 pagesLab2 MotorControl 08ĐạiDương100% (1)
- M XrutytDocument12 pagesM XrutytDistribuidorIBoolPedregalDeSantoDomingo100% (1)
- PIC32 FamiliaDocument6 pagesPIC32 Familiaffcscribd100% (1)
- Development Kit For E-Paper Display: Dalian Good Display Co., LTDDocument13 pagesDevelopment Kit For E-Paper Display: Dalian Good Display Co., LTDjhonatan cock100% (1)
- Industrial Electronics Document Explains How DIACs and Triacs Work for Phase Control ApplicationsDocument15 pagesIndustrial Electronics Document Explains How DIACs and Triacs Work for Phase Control ApplicationsFrancis Valdez Lopez100% (1)
- PosterDocument2 pagesPostervic_silva100% (1)
- Arduino Uno LCD Display Ultrasonic DistanceDocument21 pagesArduino Uno LCD Display Ultrasonic DistanceMadanKumar100% (1)
- SIMPLE DIGITAL SECURITY SYSTEMDocument47 pagesSIMPLE DIGITAL SECURITY SYSTEMAnkita Tiwari100% (1)
- Introduction To Embedded SystemsDocument33 pagesIntroduction To Embedded Systemscharanpreetg1100% (1)
- Unit-Ii C and Assembly: Software Technology For Embedded SystemsDocument41 pagesUnit-Ii C and Assembly: Software Technology For Embedded Systemskarthi_1729100% (2)
- LED ChaserDocument7 pagesLED ChaserMegan Skinner100% (1)
- Choosing The Correct DigipotDocument4 pagesChoosing The Correct Digipottubeman1814100% (1)
- RPS-401A-80P: FeaturesDocument2 pagesRPS-401A-80P: FeaturesJati Ismawan100% (1)
- Aerosemi: Features ApplicationsDocument9 pagesAerosemi: Features Applicationsttnaing100% (1)
- CAN Bus ESD Protection Diode (PESD2CAN)Document13 pagesCAN Bus ESD Protection Diode (PESD2CAN)Amarnath M Damodaran100% (1)
- Circuit Drawing of Stepper Motor ControllerDocument24 pagesCircuit Drawing of Stepper Motor Controlleranon-814167100% (5)
- PIC+l293d DocumentDocument5 pagesPIC+l293d Documentmadduanil100% (1)
- By Marl Us: Lighting The Right To TheDocument7 pagesBy Marl Us: Lighting The Right To TheGiancarloRichardRivadeneyraMiranda100% (1)
- Practical PIC ProjectsDocument14 pagesPractical PIC ProjectsArdhika Dhennis Putra Ananda100% (1)
- E 03 B 035Document1 pageE 03 B 035Tariq Zuhluf100% (1)
- Usb RS232Document7 pagesUsb RS232Juan Luis Carr100% (1)
- How To Control Stepper Motor With A4988 Driver and ArduinoDocument4 pagesHow To Control Stepper Motor With A4988 Driver and ArduinoAnonymous e3XZzQNo ratings yet
- Step 1: Specification, Motor DriverDocument8 pagesStep 1: Specification, Motor DriverAfriNo ratings yet
- Stepper Motor Control: DetailsDocument2 pagesStepper Motor Control: Detailsapieron1No ratings yet
- Stepper TextDocument1 pageStepper TextfNo ratings yet
- CPEN 100 Laboratory No. 4Document8 pagesCPEN 100 Laboratory No. 4Jiever AustriaNo ratings yet
- How to control Stepper motor speed with Arduino, potentiometer & A4988 driverDocument5 pagesHow to control Stepper motor speed with Arduino, potentiometer & A4988 driverMihai Bogdan100% (1)
- 08 GetdataDocument16 pages08 GetdataAdam MamaniNo ratings yet
- 10 SetSerialNumberDocument10 pages10 SetSerialNumberAdam MamaniNo ratings yet
- 04 TraceconnectDocument5 pages04 TraceconnectAdam MamaniNo ratings yet
- Elpac Power System 24v v.1Document5 pagesElpac Power System 24v v.1Adam MamaniNo ratings yet
- Elpac Power System 24v v.2Document3 pagesElpac Power System 24v v.2Adam MamaniNo ratings yet
- Datasoft For LaptopDocument1 pageDatasoft For LaptopAdam MamaniNo ratings yet
- Item Rate Boq: Validate Print HelpDocument24 pagesItem Rate Boq: Validate Print HelpapsNo ratings yet
- ACFrOgAb5QT5bPKn JbEPyaRfa78vIQN-e1sE8t5A3MOkwa6LVR41fG z8-PcMus7pHQLVjDefafkXnWEWWXu7I2taGXCOOg8w JKcSJFoy jK7xgp9JXAKniX6wDocument52 pagesACFrOgAb5QT5bPKn JbEPyaRfa78vIQN-e1sE8t5A3MOkwa6LVR41fG z8-PcMus7pHQLVjDefafkXnWEWWXu7I2taGXCOOg8w JKcSJFoy jK7xgp9JXAKniX6wMario PaucarNo ratings yet
- 523 BA19 Ad 01Document5 pages523 BA19 Ad 01ramesh1926No ratings yet
- Kseb Ae SyllabusDocument4 pagesKseb Ae SyllabusStech 007No ratings yet
- Testing and Commissioning of Electrical EquipmentDocument2 pagesTesting and Commissioning of Electrical EquipmentGuna PriyaNo ratings yet
- MS-English Neutral User Manual-192321062006005Document14 pagesMS-English Neutral User Manual-192321062006005Abdelwhab ElsaftyNo ratings yet
- Inverter and Its TopologiesDocument14 pagesInverter and Its TopologiesAvnesh SuryavanshiNo ratings yet
- Basic Electrical SafetyDocument39 pagesBasic Electrical Safetyzainikamal1975No ratings yet
- PH MeterDocument16 pagesPH MeterAmaluddinNo ratings yet
- RFIA Push Button CatalogueDocument89 pagesRFIA Push Button CatalogueBio Eng Eslam TahaNo ratings yet
- 2.electical Line Protection Based On Circuit BreakerDocument3 pages2.electical Line Protection Based On Circuit BreakerdileeppatraNo ratings yet
- Brain Filler Design GuideDocument37 pagesBrain Filler Design GuideNick ChristakesNo ratings yet
- Optoacoplador de Accionamiento de Puerta IGBT - A314JDocument17 pagesOptoacoplador de Accionamiento de Puerta IGBT - A314JGonzalo RojasNo ratings yet
- Recloser S280771Document52 pagesRecloser S280771Gamal YonesNo ratings yet
- TractorDocument4 pagesTractorVanita BariayaNo ratings yet
- WIRELESSCHARGINGUSINGTESLACOIL Edited13feb20Document10 pagesWIRELESSCHARGINGUSINGTESLACOIL Edited13feb20Vishnu Muraleedharan100% (1)
- 3RT, 3RH, 3TB, 3TC, 3TH, 3TK Contactors for Railway ApplicationsDocument76 pages3RT, 3RH, 3TB, 3TC, 3TH, 3TK Contactors for Railway ApplicationsMinh ToanNo ratings yet
- D.C. Generators MCQ PDFDocument22 pagesD.C. Generators MCQ PDFYasir Arafin TonmoyNo ratings yet
- Ttp223-Ba6 C80757Document8 pagesTtp223-Ba6 C80757Sahar ShahidNo ratings yet
- THree Phase To Single Phase TransformerDocument2 pagesTHree Phase To Single Phase TransformerVamshi Kumar Reddy MNo ratings yet
- C6.6 ENGINE - GENERATOR SET Operation & Maintenance Manuals - PARALLEL OPERATIONDocument4 pagesC6.6 ENGINE - GENERATOR SET Operation & Maintenance Manuals - PARALLEL OPERATIONsuperteffyNo ratings yet
- Circuit BreakerDocument31 pagesCircuit BreakervehocurriNo ratings yet
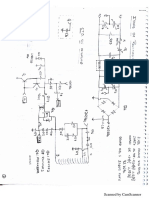
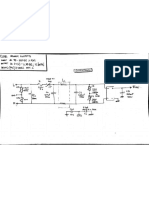
- Build 6L6GC Single Tube AmpDocument20 pagesBuild 6L6GC Single Tube Ampmb_raghavendraNo ratings yet
- Appendix I - GuideToSupplyMetering - (v6) PDFDocument24 pagesAppendix I - GuideToSupplyMetering - (v6) PDFAdrianSebastianDarmansyahNo ratings yet
- Joslyn VBM Switches InstructionsDocument34 pagesJoslyn VBM Switches InstructionsItalo MartinangeliNo ratings yet
- Small Wonder QRP Bitx40Document5 pagesSmall Wonder QRP Bitx40Jonathan ReaNo ratings yet
- Applications and Working of PMBLDC MotorsDocument8 pagesApplications and Working of PMBLDC MotorsvlkumashankardeekshithNo ratings yet
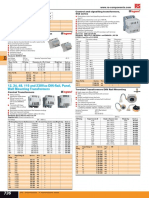
- Transformers: 12, 24, 48, 115 and 230vac DIN-Rail, Panel, Wall Mounting TransformersDocument1 pageTransformers: 12, 24, 48, 115 and 230vac DIN-Rail, Panel, Wall Mounting TransformersЛеха ЯнчукNo ratings yet
- Generator Capability CurveDocument20 pagesGenerator Capability Curvenabil160874No ratings yet