You might also like
- Major Utilities Relocation For UndergroundDocument2 pagesMajor Utilities Relocation For UndergroundShekh Muhsen Uddin AhmedNo ratings yet
- Getting Started PDFDocument14 pagesGetting Started PDFCeliz MedinaNo ratings yet
- UG Water Line RelocationDocument1 pageUG Water Line RelocationShekh Muhsen Uddin AhmedNo ratings yet
- Data Interpolation From Table Using ExcelDocument1 pageData Interpolation From Table Using ExcelShekh Muhsen Uddin AhmedNo ratings yet
- WALLPRES ExcavationDocument11 pagesWALLPRES ExcavationShekh Muhsen Uddin AhmedNo ratings yet
- Advance Utilities Relocation For Underground StationDocument1 pageAdvance Utilities Relocation For Underground StationShekh Muhsen Uddin AhmedNo ratings yet
- Hydro Utility Relocation For Laird StationDocument2 pagesHydro Utility Relocation For Laird StationShekh Muhsen Uddin AhmedNo ratings yet
- Pile DetailsDocument1 pagePile DetailsShekh Muhsen Uddin AhmedNo ratings yet
- Diaphragm Wall ConstructionDocument9 pagesDiaphragm Wall ConstructionShekh Muhsen Uddin AhmedNo ratings yet
- ConstructionPracticesAnsProceduresManual PDFDocument64 pagesConstructionPracticesAnsProceduresManual PDFAnonymous 2BfRGloP9iNo ratings yet
- Large Underground Station ConstructionDocument2 pagesLarge Underground Station ConstructionShekh Muhsen Uddin AhmedNo ratings yet
- Linear Static Seismic Force Procedures <40Document28 pagesLinear Static Seismic Force Procedures <40alfieNo ratings yet
- Underground Station ConstructionDocument1 pageUnderground Station ConstructionShekh Muhsen Uddin AhmedNo ratings yet
- International Lateral LoadsDocument38 pagesInternational Lateral LoadsRamilArtates100% (1)
- Linear Static Seismic Force Procedures <40Document28 pagesLinear Static Seismic Force Procedures <40alfieNo ratings yet
- Section DesignerDocument191 pagesSection DesignergreatwellwisherNo ratings yet
- Pile DetailsDocument1 pagePile DetailsShekh Muhsen Uddin AhmedNo ratings yet
- b2b SpliceDocument5 pagesb2b SpliceShekh Muhsen Uddin AhmedNo ratings yet
- Plaxis Tutorial 01Document33 pagesPlaxis Tutorial 01Duc Tran0% (2)
- Channai MetroDocument11 pagesChannai MetroShekh Muhsen Uddin AhmedNo ratings yet
- Torsional Irregularity Plan ASCE 7-10 EC8Document11 pagesTorsional Irregularity Plan ASCE 7-10 EC8Shekh Muhsen Uddin AhmedNo ratings yet
- Targeted Worker Summary Report: Economically Disadvantaged Area Hours SubtotalDocument1 pageTargeted Worker Summary Report: Economically Disadvantaged Area Hours SubtotalShekh Muhsen Uddin AhmedNo ratings yet
- A Time History Analysis Method-4689Document8 pagesA Time History Analysis Method-4689Shekh Muhsen Uddin AhmedNo ratings yet
- IBC1997-UBC2000 Structural Comparison and Cross ReferenceDocument240 pagesIBC1997-UBC2000 Structural Comparison and Cross Referencerobersasmita100% (1)
- Osha 3115Document30 pagesOsha 3115aaa206No ratings yet
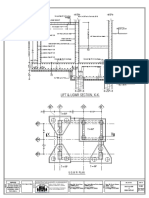
- Under Ground Reservoir DetailsDocument1 pageUnder Ground Reservoir DetailsShekh Muhsen Uddin AhmedNo ratings yet
- Structural steel beam dimensions and properties tableDocument42 pagesStructural steel beam dimensions and properties tableShekh Muhsen Uddin AhmedNo ratings yet
- Structural steel beam dimensions and properties tableDocument42 pagesStructural steel beam dimensions and properties tableShekh Muhsen Uddin AhmedNo ratings yet
- ELECTRICAL PLAN LEGENDDocument3 pagesELECTRICAL PLAN LEGENDShekh Muhsen Uddin AhmedNo ratings yet
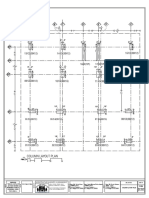
- Column Layout PlanDocument1 pageColumn Layout PlanShekh Muhsen Uddin Ahmed0% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Folleto PDFDocument232 pagesFolleto PDFpabloNo ratings yet
- 732S-EN - Euro4 Display IC05Document24 pages732S-EN - Euro4 Display IC05HamidNo ratings yet
- Centrifugal Pump Final Lab ReportDocument14 pagesCentrifugal Pump Final Lab Reportcracking khalifNo ratings yet
- 933E Excavator: Tough World. Tough EquipmentDocument2 pages933E Excavator: Tough World. Tough EquipmentMamoune DassouliNo ratings yet
- Great Dane 03chariot - PartscatalogDocument48 pagesGreat Dane 03chariot - Partscatalogcricket2654No ratings yet
- Objective Questions On Induction Motor - 1 - Electrical4uDocument11 pagesObjective Questions On Induction Motor - 1 - Electrical4uMahesh MandalaNo ratings yet
- AGC-3 Operators Manual 4189340525 ESDocument40 pagesAGC-3 Operators Manual 4189340525 ESWilliam AlvaradoNo ratings yet
- Electrical Wiring Components and AccessoriesDocument14 pagesElectrical Wiring Components and AccessoriesHarshit SaraswatNo ratings yet
- Fire Pumps and Pump GroupsDocument44 pagesFire Pumps and Pump GroupsDamarys A. Ulloa S.No ratings yet
- Funk™ 23000 HMD Transmission: Industrial Drivetrain SpecificationsDocument1 pageFunk™ 23000 HMD Transmission: Industrial Drivetrain SpecificationsNoe Melgarejo PonceNo ratings yet
- APP Pumps: APP 0.6-1.0 / APP 1.5-3.5 / APP (W) 5.1-10.2 / APP 11-13 / APP 16-22 / APP 21-43Document42 pagesAPP Pumps: APP 0.6-1.0 / APP 1.5-3.5 / APP (W) 5.1-10.2 / APP 11-13 / APP 16-22 / APP 21-43Bear LoeraNo ratings yet
- Function6 SARKARDocument4 pagesFunction6 SARKARRavi royNo ratings yet
- Connecting Rod BoltsDocument2 pagesConnecting Rod BoltsRachitNo ratings yet
- Reman Unit New Service Unit: 5 SpeedsDocument51 pagesReman Unit New Service Unit: 5 SpeedsHamilton MirandaNo ratings yet
- Restraint PDFDocument119 pagesRestraint PDFErkki IsokangasNo ratings yet
- Service Manual #41Document106 pagesService Manual #41CharlesWhiteNo ratings yet
- 1.3 Hydraulic PumpsDocument15 pages1.3 Hydraulic Pumpsdoan lucNo ratings yet
- D37PX-21 M Eeam024300 D31 37 39 Ex PX 21 0509Document258 pagesD37PX-21 M Eeam024300 D31 37 39 Ex PX 21 0509Chrissz Noxd100% (2)
- Chassis 21Document2 pagesChassis 21Roberto MarianoNo ratings yet
- P - 202G Revised Job PlanDocument33 pagesP - 202G Revised Job Plandanish moinNo ratings yet
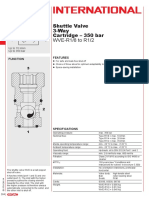
- Shuttle Valve 3-Way Cartridge - 350 Bar WVE-R1/8 To R1/2: Features FunctionDocument4 pagesShuttle Valve 3-Way Cartridge - 350 Bar WVE-R1/8 To R1/2: Features FunctionLevi BriceñoNo ratings yet
- Blink Fault Code Diagnostic Reference For Volkswagen & Audi (USA Only)Document5 pagesBlink Fault Code Diagnostic Reference For Volkswagen & Audi (USA Only)Dane DanijelNo ratings yet
- Wedge Lock Splice - ConnectorsDocument8 pagesWedge Lock Splice - ConnectorsadhithyaNo ratings yet
- SAFETY TIPS FOR WORKING ON LOCOMOTIVESDocument4 pagesSAFETY TIPS FOR WORKING ON LOCOMOTIVESankur bhatnagarNo ratings yet
- Link Belt298 HSLTDocument36 pagesLink Belt298 HSLTIvan Sevillano Sanchez100% (1)
- 16s151 PDFDocument28 pages16s151 PDFYazid KarimNo ratings yet
- Acer Group Lathe Lubrication Oil ChartDocument1 pageAcer Group Lathe Lubrication Oil ChartAlexNo ratings yet
- Ampacity of Copper Conductors Including Wire in RacewayDocument2 pagesAmpacity of Copper Conductors Including Wire in RacewayTenda Kyojin0% (1)
- Butterfly ValveDocument14 pagesButterfly ValveSingSareblakKanaManahNo ratings yet
- Manual of Gear PumpDocument5 pagesManual of Gear PumpJaianshu SharmaNo ratings yet