You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- An Introductory Study To Cyber Security in NECDocument180 pagesAn Introductory Study To Cyber Security in NECTrang-Nhung PhamNo ratings yet
- IBM Whitepaper Maximo For Business and IDocument16 pagesIBM Whitepaper Maximo For Business and Initinkr80No ratings yet
- LMR + LTE - The Evolving Public-Safety NetworkDocument63 pagesLMR + LTE - The Evolving Public-Safety NetworkGeoffrey AlleyneNo ratings yet
- Bi SC 75 3 - FinalDocument277 pagesBi SC 75 3 - FinalHenry ArnoldNo ratings yet
- RFP DataLytics - Vol 1Document101 pagesRFP DataLytics - Vol 1gk9No ratings yet
- Web Services Material - Sriman Latest PDFDocument300 pagesWeb Services Material - Sriman Latest PDFArupanand NayakNo ratings yet
- EPRI CIM and 61850 Harmonization 061610Document29 pagesEPRI CIM and 61850 Harmonization 061610Jaime A. SánchezNo ratings yet
- The Malaysian Public Sector ICT Strategic Plan - Powering Public Sector Digital Transformation 2011-2015Document48 pagesThe Malaysian Public Sector ICT Strategic Plan - Powering Public Sector Digital Transformation 2011-2015AdeNMNo ratings yet
- Calculation The Spacing of Discontinuities From 3D Point CloudsDocument9 pagesCalculation The Spacing of Discontinuities From 3D Point CloudsrNo ratings yet
- Elmo 2014Document13 pagesElmo 2014rNo ratings yet
- Fault in IranDocument1 pageFault in IranrNo ratings yet
- Convvra: A Center of Excellence in Earth Sciences and EngineeringDocument22 pagesConvvra: A Center of Excellence in Earth Sciences and EngineeringrNo ratings yet
- Determination Rock Quality Designation RQD Basis On Joints: January 2011Document6 pagesDetermination Rock Quality Designation RQD Basis On Joints: January 2011rNo ratings yet
- Three-Dimensional Strength-Reduction Finite Element Analysis of Slopes: Geometric EffectsDocument15 pagesThree-Dimensional Strength-Reduction Finite Element Analysis of Slopes: Geometric EffectsrNo ratings yet
- Pitwall Stability Analysis-Case StudiesDocument6 pagesPitwall Stability Analysis-Case StudiesrNo ratings yet
- Gravitational Stresses in Anisotropic Rock Masses With Inclined StrataDocument12 pagesGravitational Stresses in Anisotropic Rock Masses With Inclined StratarNo ratings yet
- Chinnery 1966 FaultsDocument16 pagesChinnery 1966 FaultsrNo ratings yet
- Analysis of A Rock Slide Stabilized With A Toe-Berm: A Case Study in British Columbia, CanadaDocument13 pagesAnalysis of A Rock Slide Stabilized With A Toe-Berm: A Case Study in British Columbia, CanadarNo ratings yet
- Men and 2010 DykesDocument12 pagesMen and 2010 DykesrNo ratings yet
- Rubin 1995Document50 pagesRubin 1995r100% (1)
- Stability Analysis of A Jointed Rock Slope in HimalayasDocument7 pagesStability Analysis of A Jointed Rock Slope in HimalayasrNo ratings yet
- Characteriz FracturesDocument11 pagesCharacteriz FracturesrNo ratings yet
- Transpetional CinematicsDocument15 pagesTranspetional CinematicsrNo ratings yet
- Walkeretal GeologyDocument5 pagesWalkeretal GeologyrNo ratings yet
- Dershowitz 1988Document31 pagesDershowitz 1988rNo ratings yet
- 01 93 00 Building Information ModelDocument15 pages01 93 00 Building Information ModelShahid AkramNo ratings yet
- ANT+ Device Profile: Legacy Fitness Equipment (EOL)Document56 pagesANT+ Device Profile: Legacy Fitness Equipment (EOL)David RamirezNo ratings yet
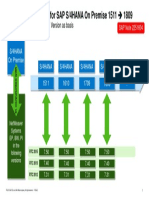
- Version Interoperability For SAP S/4HANA On Premise 1511 1809Document1 pageVersion Interoperability For SAP S/4HANA On Premise 1511 1809vinodhNo ratings yet
- Technology ReportsDocument49 pagesTechnology ReportsmbhangaleNo ratings yet
- DICOM Conformance StatementDocument97 pagesDICOM Conformance Statementheyuna08No ratings yet
- TSIccsDocument30 pagesTSIccsRăzvan PopaNo ratings yet
- Videoid Userid Username VideonameDocument332 pagesVideoid Userid Username Videonamesayed sabryNo ratings yet
- Usvisit Biometric StandardsDocument70 pagesUsvisit Biometric StandardsJuan Carlos MendezNo ratings yet
- ORAN-WG4 IOT 0-v01 00 PDFDocument70 pagesORAN-WG4 IOT 0-v01 00 PDFelectrico servicesNo ratings yet
- Dutch Quant WP TranslationDocument25 pagesDutch Quant WP TranslationKai BloetjesNo ratings yet
- JISC QA PolicyDocument8 pagesJISC QA PolicyJo-Sharon UdohNo ratings yet
- "This Is Not For Kids'' /+27715451704 HOW TO JOIN ILLUMINATI SOCIETY IN SOUTH AFRICA AND UK!FOR MONEY, FAME, WEALTH AND POWER 100%Document16 pages"This Is Not For Kids'' /+27715451704 HOW TO JOIN ILLUMINATI SOCIETY IN SOUTH AFRICA AND UK!FOR MONEY, FAME, WEALTH AND POWER 100%Priesty JosephNo ratings yet
- Border ManagementDocument8 pagesBorder ManagementanthonymugalaNo ratings yet
- Read This First Creo 4 m020Document14 pagesRead This First Creo 4 m020GilbertoNo ratings yet
- Software: Its Nature and QualitiesDocument11 pagesSoftware: Its Nature and QualitiesAkhil V MohanNo ratings yet
- 201124f I40 SPS 2020 Talk News From The Asset Administration Shell ENDocument17 pages201124f I40 SPS 2020 Talk News From The Asset Administration Shell ENddssaNo ratings yet
- Group 01: Articles For ReviewDocument4 pagesGroup 01: Articles For ReviewPrincess Krenzelle BañagaNo ratings yet
- Single Window ProspectsDocument9 pagesSingle Window ProspectsTezeen ANo ratings yet
- SKEMA Inventory of PSW and PCSDocument59 pagesSKEMA Inventory of PSW and PCSIlhamRifaldiNo ratings yet
- Bechtel Telecommunications Technical Journal: January 2007Document100 pagesBechtel Telecommunications Technical Journal: January 2007Glenn Allen Torshizi100% (2)
- Atlantic Voices, Vol. 3, No. 2Document12 pagesAtlantic Voices, Vol. 3, No. 2Dragos AlexandruNo ratings yet
- SIMATIC S7-1200 CP 1243-1 V3.2 CP 1243-7 LTE V3.3 CP 1243-8 IRC V3.2 Protocol IEC 60870-5-104 Interoperability List V3.3Document17 pagesSIMATIC S7-1200 CP 1243-1 V3.2 CP 1243-7 LTE V3.3 CP 1243-8 IRC V3.2 Protocol IEC 60870-5-104 Interoperability List V3.3Florin Marian MoiseNo ratings yet