You might also like
- Prevention of Actuator Emissions in the Oil and Gas IndustryFrom EverandPrevention of Actuator Emissions in the Oil and Gas IndustryNo ratings yet
- A Report On Level Measuring Instruments: Submitted byDocument54 pagesA Report On Level Measuring Instruments: Submitted byபிரசன்னகுமார் ஆனந்தன்No ratings yet
- GWR Level Transmitter Working PrincipleDocument3 pagesGWR Level Transmitter Working PrincipleAbarajithan RajendranNo ratings yet
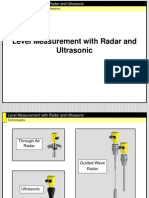
- Radar and Ultrasonic Level MeasurementDocument24 pagesRadar and Ultrasonic Level MeasurementvenkatsubbuNo ratings yet
- Flow Element Sizing & Design (DNARAYAN)Document45 pagesFlow Element Sizing & Design (DNARAYAN)AttyubNo ratings yet
- Turbine Meter Tech GuideDocument24 pagesTurbine Meter Tech GuideDenilson Souto Dos Santos100% (1)
- Subsea Production Control Systems: 1 ForewordDocument25 pagesSubsea Production Control Systems: 1 ForewordBSFNo ratings yet
- Tutorial 4Document40 pagesTutorial 4LEDNo ratings yet
- Basics of Instrumentation & ControlDocument29 pagesBasics of Instrumentation & ControlprathmeshNo ratings yet
- Turbine Meter Calculation FundamentalDocument10 pagesTurbine Meter Calculation FundamentalMuhammad Sa'adNo ratings yet
- Sensepoint XCD TechMan MAN0873 Iss8 0913 EMEAIDocument84 pagesSensepoint XCD TechMan MAN0873 Iss8 0913 EMEAImusajcNo ratings yet
- New USM Installation ProcedureDocument18 pagesNew USM Installation ProcedureAldeline Sungahid100% (1)
- Analyzer Sample Systems Ver HappenDocument12 pagesAnalyzer Sample Systems Ver HappenIñaki Eseberri100% (1)
- Operating Instructions Flowsic600 Ultrasonic Gas Flow Meter en Im0011355Document138 pagesOperating Instructions Flowsic600 Ultrasonic Gas Flow Meter en Im0011355farhan100% (1)
- (SS0V002) Bi-Directional Sphere Type ProverDocument2 pages(SS0V002) Bi-Directional Sphere Type ProverRoberto Carlos TeixeiraNo ratings yet
- Ultrasonic Measuring DevicesDocument15 pagesUltrasonic Measuring DevicesSohail Aziz Ahmad Malik0% (1)
- Catalogue 2019Document450 pagesCatalogue 2019AntonNo ratings yet
- Coriolis vs. Ultrasonic FlowmetersDocument10 pagesCoriolis vs. Ultrasonic FlowmetersreliableplacementNo ratings yet
- FS 3210 - FS-Gas Flow ComputerDocument6 pagesFS 3210 - FS-Gas Flow ComputerBinu ManiNo ratings yet
- Ultrasonic Flow Meter-Saudi FalDocument19 pagesUltrasonic Flow Meter-Saudi FalMario R. KallabNo ratings yet
- Instrument Power Cable Sizing Part 1Document2 pagesInstrument Power Cable Sizing Part 1Art G. EnziNo ratings yet
- Design of TAS Using PLC and Batch Controller: Sreeraj SDocument7 pagesDesign of TAS Using PLC and Batch Controller: Sreeraj SSreerajNo ratings yet
- Control Systems Guide For Inteface Between Control Systems and ElectricalDocument4 pagesControl Systems Guide For Inteface Between Control Systems and Electricalaugur886No ratings yet
- Faure Herman TurbineDocument3 pagesFaure Herman TurbinedidikosanNo ratings yet
- Coriolis Flow MeterDocument4 pagesCoriolis Flow MeterIsares PodkohNo ratings yet
- Process Control (Level)Document12 pagesProcess Control (Level)Gino GalanoNo ratings yet
- Abb GCDocument105 pagesAbb GCMarthen TangkeNo ratings yet
- Flow Metering Tutorial Part 4 Ultrasonic Flow MetersDocument4 pagesFlow Metering Tutorial Part 4 Ultrasonic Flow MetersSenthil KumarNo ratings yet
- Introduction To Fiscal MeteringDocument24 pagesIntroduction To Fiscal MeteringAliNo ratings yet
- T10 Turbine Meters PDFDocument59 pagesT10 Turbine Meters PDFVictor Enrique Rosales Parada100% (1)
- Flow Measurement TechnologyDocument59 pagesFlow Measurement TechnologyIamPedroNo ratings yet
- Presentation On Automation, PLC and Scada: By, Saikat Rahut Instrumentation and Control EngineeringDocument15 pagesPresentation On Automation, PLC and Scada: By, Saikat Rahut Instrumentation and Control EngineeringShivani SrivastavaNo ratings yet
- Flow Measurement Workshop Papers on Reducing UncertaintyDocument8 pagesFlow Measurement Workshop Papers on Reducing UncertaintyjohnzrwNo ratings yet
- Ultrasonic Flow Meter SpecsDocument8 pagesUltrasonic Flow Meter SpecsAbhijit HavalNo ratings yet
- Ultrasonic Gas Metering System ComponentsDocument6 pagesUltrasonic Gas Metering System ComponentsMostafa NabilNo ratings yet
- TransmittersDocument20 pagesTransmittersTimothy LeonardNo ratings yet
- Software Redundancy For S7-300 S7-400Document4 pagesSoftware Redundancy For S7-300 S7-400Minhvuong TrannguyenNo ratings yet
- Validation of Inlet Gas Metering InstrumentationDocument13 pagesValidation of Inlet Gas Metering InstrumentationDeborah MalanumNo ratings yet
- API MPMS Chapter 8.2 Automatic Petroleum SamplingDocument3 pagesAPI MPMS Chapter 8.2 Automatic Petroleum SamplingrizkiNo ratings yet
- SS SamplingValveBrochureDocument12 pagesSS SamplingValveBrochureJOBRAN SofienNo ratings yet
- SPI BATCH LOOP AND TAG CREATIONDocument13 pagesSPI BATCH LOOP AND TAG CREATIONRomay EdoguwaNo ratings yet
- New Applications For Coriolis Meter-Based Multiphase Flow Metering in The Oil and Gas IndustriesDocument6 pagesNew Applications For Coriolis Meter-Based Multiphase Flow Metering in The Oil and Gas IndustriesJhennifer Echeverria100% (1)
- Reliable Process Analyzers Require Well-Designed Sample SystemsDocument7 pagesReliable Process Analyzers Require Well-Designed Sample Systemsaugur886No ratings yet
- Coriolis Flowmeters Are Relatively New Compared To Other Flowmeters. They WereDocument9 pagesCoriolis Flowmeters Are Relatively New Compared To Other Flowmeters. They WereAyu AgustinaNo ratings yet
- Magnetic Flow Meter 1 - 6f9aDocument16 pagesMagnetic Flow Meter 1 - 6f9aSilvaACANo ratings yet
- Instrumentation Interview QuestionDocument35 pagesInstrumentation Interview Questionabbutalibb100% (1)
- Flowmeter Selection Guide: Close WindowDocument1 pageFlowmeter Selection Guide: Close Windowduong hoang tin100% (1)
- Radar and Ultrasonic Level MeasurementDocument25 pagesRadar and Ultrasonic Level MeasurementPrashant ShahNo ratings yet
- Principle of Mass Flow Meter: Presented byDocument22 pagesPrinciple of Mass Flow Meter: Presented byParth PatelNo ratings yet
- PFS WedgeDocument26 pagesPFS WedgeMontheardNo ratings yet
- Basic Inst.Document15 pagesBasic Inst.mahesh4975No ratings yet
- Electromagnetic Flow MetersDocument11 pagesElectromagnetic Flow MeterssethuraghulNo ratings yet
- Level Measuring Instruments Selection ApplicationsDocument87 pagesLevel Measuring Instruments Selection ApplicationsArunan M100% (1)
- Godfrey - Mark Manual of Petroleum Measurement Standards Chapter 21 EFM Final PDFDocument20 pagesGodfrey - Mark Manual of Petroleum Measurement Standards Chapter 21 EFM Final PDFIman AkbariNo ratings yet
- Smith Meter UPTDocument6 pagesSmith Meter UPTvalimironescuNo ratings yet
- Paper ID-44201631Document13 pagesPaper ID-44201631lataNo ratings yet
- AnnexuresDocument10 pagesAnnexuresSahithiNo ratings yet
- Flow Measurement GuidelinesDocument13 pagesFlow Measurement GuidelinesalainNo ratings yet
- Calibrate Fire & Gas Detection SystemsDocument5 pagesCalibrate Fire & Gas Detection Systemskirandevi1981No ratings yet
- Glaxosmithkline Speeds Up Batch Release Time With Mes TechnologyDocument4 pagesGlaxosmithkline Speeds Up Batch Release Time With Mes Technologykumar_chemicalNo ratings yet
- Urs Template ContentsDocument8 pagesUrs Template ContentsipatoffNo ratings yet
- Analisis de Riesgo 2010MA-Online - QuintoDocument9 pagesAnalisis de Riesgo 2010MA-Online - QuintoSteven Correa MNo ratings yet
- Process Quality Risk Assessment at NovartisDocument13 pagesProcess Quality Risk Assessment at Novartiskumar_chemicalNo ratings yet
- Wanbury Profile February 2006Document32 pagesWanbury Profile February 2006kumar_chemicalNo ratings yet
- 3110336715Document580 pages3110336715kumar_chemicalNo ratings yet
- 01 Brambilla CH 01Document28 pages01 Brambilla CH 01kumar_chemicalNo ratings yet
- Equipment Costing: Chapter 22 (p558-597) CH EN 4253 Terry A. RingDocument20 pagesEquipment Costing: Chapter 22 (p558-597) CH EN 4253 Terry A. RingLívia AlmeidaNo ratings yet
- Batch Process WhitePaperDocument9 pagesBatch Process WhitePaperImadudin AlaNo ratings yet
- Time-Cycle For DistillationDocument7 pagesTime-Cycle For Distillationkumar_chemicalNo ratings yet
- Rouge Pharmaceutical Water Steam SystemsDocument8 pagesRouge Pharmaceutical Water Steam Systemshareesh13hNo ratings yet
- Compliance Road Maps: Staying on Track with Evolving RegulationsDocument49 pagesCompliance Road Maps: Staying on Track with Evolving Regulationskumar_chemical100% (1)
- Course Title Credits Th. Pr. Tr. Tu. Total Pre-Requisites: Course Role in Curriculum Catalogue DescriptionDocument2 pagesCourse Title Credits Th. Pr. Tr. Tu. Total Pre-Requisites: Course Role in Curriculum Catalogue Descriptionkumar_chemicalNo ratings yet
- 13MA Rich PDFDocument9 pages13MA Rich PDFkumar_chemicalNo ratings yet
- Travelling Expenses China-2016Document2 pagesTravelling Expenses China-2016kumar_chemicalNo ratings yet
- Troup and Georgakis CPC08 2012 - FINAL-FinalDocument25 pagesTroup and Georgakis CPC08 2012 - FINAL-Finalkumar_chemicalNo ratings yet
- Laureates: Junior Prizes of The SCS Fall Meeting 2016: DitorialDocument2 pagesLaureates: Junior Prizes of The SCS Fall Meeting 2016: Ditorialkumar_chemicalNo ratings yet
- Conceptual Production Plant DesignDocument22 pagesConceptual Production Plant Designkumar_chemicalNo ratings yet
- RAJIV GANDHI UNIVERSITY OF HEALTH SCIENCES CLEANING VALIDATIONDocument10 pagesRAJIV GANDHI UNIVERSITY OF HEALTH SCIENCES CLEANING VALIDATIONkumar_chemicalNo ratings yet
- Publications in Brief: BooksDocument3 pagesPublications in Brief: Booksbhawanisr@gmail.comNo ratings yet
- Rouge Pharmaceutical Water Steam SystemsDocument8 pagesRouge Pharmaceutical Water Steam Systemshareesh13hNo ratings yet
- E111 0Document4 pagesE111 0kumar_chemicalNo ratings yet
- 4731Document2 pages4731kumar_chemicalNo ratings yet
- 11ND Walsh PDFDocument7 pages11ND Walsh PDFAshok LenkaNo ratings yet
- Vessel VolumesDocument75 pagesVessel Volumeskumar_chemicalNo ratings yet
- 10 3303cet1648004Document7 pages10 3303cet1648004kumar_chemicalNo ratings yet
- How Operational Excellence Works - Process Optimization TechniquesDocument6 pagesHow Operational Excellence Works - Process Optimization Techniqueskumar_chemicalNo ratings yet
- 3.ITEC Shanghai 2007 Mothes Final 2007-4-17Document19 pages3.ITEC Shanghai 2007 Mothes Final 2007-4-17kumar_chemicalNo ratings yet
- How Operational Excellence Works - Process Optimization TechniquesDocument6 pagesHow Operational Excellence Works - Process Optimization Techniqueskumar_chemicalNo ratings yet
- Aspenone Production Management Execution PharmaceuticalsDocument4 pagesAspenone Production Management Execution Pharmaceuticalskumar_chemicalNo ratings yet
- Chapter 7 - The Superposition of Waves PDFDocument20 pagesChapter 7 - The Superposition of Waves PDFCcA BcggNo ratings yet
- Design and Construction of A Gallium Fixed-Point Blackbody at CENAMDocument3 pagesDesign and Construction of A Gallium Fixed-Point Blackbody at CENAMjrlr65No ratings yet
- Self-Powered Psychotronic GeneratorDocument5 pagesSelf-Powered Psychotronic GeneratorevandrojsilvaNo ratings yet
- Chapter 6 ACKulkarniDocument43 pagesChapter 6 ACKulkarnipurijatinNo ratings yet
- Course Name: Basic Electronics: B.Tech First YearDocument25 pagesCourse Name: Basic Electronics: B.Tech First YearNeha GabaNo ratings yet
- Ncert Solutions Class 11 Physics Chapter 4 Motion in A Plane - 0Document37 pagesNcert Solutions Class 11 Physics Chapter 4 Motion in A Plane - 0RudraNo ratings yet
- Pathfit 2 Babe Sheena EsperatDocument7 pagesPathfit 2 Babe Sheena EsperatNur SetsuNo ratings yet
- Experiment - Phase Diagram - Three Component Liquid SystemDocument12 pagesExperiment - Phase Diagram - Three Component Liquid SystemEric K50% (2)
- Projectile Motion Honors PhysicsDocument29 pagesProjectile Motion Honors PhysicsDeepanshu GautamNo ratings yet
- ME 218 - Spring 2018 - Week05 HandoutDocument7 pagesME 218 - Spring 2018 - Week05 HandoutNitin BhatiNo ratings yet
- Bangladesh University of Engineering and Technology: Name of The Experiment: Verification of KVL & Voltage Devider RuleDocument7 pagesBangladesh University of Engineering and Technology: Name of The Experiment: Verification of KVL & Voltage Devider RuleSayeed Mohammed100% (1)
- Ce 6306 Som Part A AnswersDocument21 pagesCe 6306 Som Part A Answersommech2020No ratings yet
- Ee - Electromagnetic Theory PDFDocument86 pagesEe - Electromagnetic Theory PDFSh. ANUJ KUMAR SHARMANo ratings yet
- CRT Monitor PhysicsDocument2 pagesCRT Monitor PhysicsAbdullionNo ratings yet
- States of Matter PDFDocument42 pagesStates of Matter PDFSarthak GuptaNo ratings yet
- Career Endeavour Test Series1Document13 pagesCareer Endeavour Test Series1Gugan Raj100% (1)
- Conductance ManualDocument12 pagesConductance ManualhannibalmrNo ratings yet
- Electromagnetism ExperimentsDocument6 pagesElectromagnetism ExperimentsSalmizam IzamNo ratings yet
- DSCE ENGINEERING MATHEMATICS-I AND PHYSICS SYLLABUSDocument119 pagesDSCE ENGINEERING MATHEMATICS-I AND PHYSICS SYLLABUSNandan MaheshNo ratings yet
- Introduction 2Document30 pagesIntroduction 2niteshNo ratings yet
- Symmetric Teleparallel Gauss-Bonnet Gravity and Its ExtensionsDocument23 pagesSymmetric Teleparallel Gauss-Bonnet Gravity and Its ExtensionsjahsdkfjahsldfkhsdfkajsdflNo ratings yet
- 123Document16 pages123Jj MontillaNo ratings yet
- 1st Year Chemistry All MCQS Short Questions For Federal Board Punjab BoardDocument8 pages1st Year Chemistry All MCQS Short Questions For Federal Board Punjab BoardDaniyal yousaf100% (1)
- DIAGNOSTIC TEST in Physical Science 2ndquarterDocument10 pagesDIAGNOSTIC TEST in Physical Science 2ndquarterMELTON MERZANo ratings yet
- Physics Internal AssessmentDocument14 pagesPhysics Internal AssessmentRachitNo ratings yet
- Temperature and Heat: Heat Is A Flow of Energy Due To Temperature DifferencesDocument16 pagesTemperature and Heat: Heat Is A Flow of Energy Due To Temperature DifferencesPelentina SimangunsongNo ratings yet
- Turbomachines: (Physical Interpretation: What Are We Doing Today?)Document29 pagesTurbomachines: (Physical Interpretation: What Are We Doing Today?)Khalid AlhashimNo ratings yet
- Chapter 7 Fourier Series: 1 Learning OutcomesDocument12 pagesChapter 7 Fourier Series: 1 Learning OutcomesMorsaleen ChowdhuryNo ratings yet
- Reheat Factor - Mollier DiiagramDocument40 pagesReheat Factor - Mollier DiiagramTanmay MajhiNo ratings yet
- Photoluminescence and Photocatalytic Activity of Spin Coated Ag+ Doped Anatase TiO2 Thin FilmsDocument14 pagesPhotoluminescence and Photocatalytic Activity of Spin Coated Ag+ Doped Anatase TiO2 Thin FilmsJasielRuizDesalesNo ratings yet