You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- What Is A Temperature Sensor?: Variable ResistorDocument7 pagesWhat Is A Temperature Sensor?: Variable ResistorAashish KumarNo ratings yet
- Power Supply Projects: A Collection of Innovative and Practical Design ProjectsFrom EverandPower Supply Projects: A Collection of Innovative and Practical Design ProjectsRating: 3 out of 5 stars3/5 (2)
- Thermocouple Trainer REV 02Document7 pagesThermocouple Trainer REV 02Raj Mehra MeharNo ratings yet
- EC335 Power Electronics & Instrumentation Lab PDFDocument33 pagesEC335 Power Electronics & Instrumentation Lab PDFAnu RajNo ratings yet
- Intelligent Fire Detector With Automatic Water Sprinkler System To Avoid Fire AccidentsDocument11 pagesIntelligent Fire Detector With Automatic Water Sprinkler System To Avoid Fire Accidentssk THOUFIQNo ratings yet
- Module 6Document15 pagesModule 6syamalaNo ratings yet
- Emi Lab Sem V (Ece) Experiment No.: 1Document19 pagesEmi Lab Sem V (Ece) Experiment No.: 1neha sharmaNo ratings yet
- LM35 Temperature Sensor Circuit Activates LEDs at ThresholdsDocument5 pagesLM35 Temperature Sensor Circuit Activates LEDs at ThresholdsAbhinav Madheshiya100% (1)
- Hardware_mini_project (1)_removedDocument12 pagesHardware_mini_project (1)_removedAyushi singh PariharNo ratings yet
- Practicas Digiac 1750 2Document26 pagesPracticas Digiac 1750 2Cristy De Jesus GonzalezNo ratings yet
- Eee 308Document52 pagesEee 308Samuel SamsonNo ratings yet
- Smart HeaterDocument4 pagesSmart HeaterseventhsensegroupNo ratings yet
- Project On Room Temperature Controller Using LM 324 and NCT ThermistorDocument12 pagesProject On Room Temperature Controller Using LM 324 and NCT ThermistorMd.Sameul IslamNo ratings yet
- Power Requirement Is Very Low For Controlling The Electrical or Electronic SystemDocument9 pagesPower Requirement Is Very Low For Controlling The Electrical or Electronic SystemVineela ThonduriNo ratings yet
- TransducerDocument42 pagesTransducerShreyash SargarNo ratings yet
- Unit V Transducers and Data Acquisition Systems TransducersDocument13 pagesUnit V Transducers and Data Acquisition Systems TransducersViswanathan ASNo ratings yet
- Interfacing of Temperature Sensor LM 35Document9 pagesInterfacing of Temperature Sensor LM 35shubham309No ratings yet
- Instrumenatation Project FileDocument8 pagesInstrumenatation Project FileAshaal AalamNo ratings yet
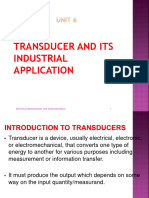
- Unit 6Document65 pagesUnit 6ELIAS AyeleNo ratings yet
- Into Electrical Form Which Can Be Further Used For Electronic Devices. A SensorDocument11 pagesInto Electrical Form Which Can Be Further Used For Electronic Devices. A SensorGaurav SharmaNo ratings yet
- Sensors and TransducersDocument15 pagesSensors and TransducersWaqas AhmadNo ratings yet
- Main AfsDocument14 pagesMain AfsIbrahim KaithakkodanNo ratings yet
- Sensors in WordDocument14 pagesSensors in WorddawitNo ratings yet
- EEE202H Group4 (179-183) Project ReportDocument9 pagesEEE202H Group4 (179-183) Project ReportShamsul HaqueNo ratings yet
- Total Circuit Internal Working ExplanationDocument11 pagesTotal Circuit Internal Working ExplanationRajkumar NmlNo ratings yet
- Semester Project PDFDocument5 pagesSemester Project PDFDimaghkhrab haiNo ratings yet
- Anil-Poudel31049 IVDocument16 pagesAnil-Poudel31049 IVrayeke8859No ratings yet
- Introduction to Digiac 1750 Transducers & InstrumentationDocument18 pagesIntroduction to Digiac 1750 Transducers & Instrumentationmalimanaz100% (1)
- 5 AbstractDocument13 pages5 AbstractIntanbyzuri ARNo ratings yet
- Introduction of TransducerDocument6 pagesIntroduction of TransducerFairus AffiniNo ratings yet
- Advance Elevator SystemDocument16 pagesAdvance Elevator SystemAyeshaNo ratings yet
- AutomationDocument2 pagesAutomationTaanzNo ratings yet
- 02-LVDT Trainer UITM-02 Range - 10mm NewDocument13 pages02-LVDT Trainer UITM-02 Range - 10mm Newhydromec_indiaNo ratings yet
- 1 EO 102 Transducers and Instrumentation PDFDocument102 pages1 EO 102 Transducers and Instrumentation PDFFarhan Ahmad60% (5)
- Sensor interfacing techniquesDocument16 pagesSensor interfacing techniquesRaja VenkateshNo ratings yet
- Harish Exp9Document7 pagesHarish Exp9Harish Kumar K.SNo ratings yet
- LVDT RTDDocument7 pagesLVDT RTDAjit PatraNo ratings yet
- Detect Earthquake Warnings with SensorsDocument30 pagesDetect Earthquake Warnings with SensorstibbuNo ratings yet
- Mainly Instruments For Measurement and ControlDocument17 pagesMainly Instruments For Measurement and ControlbeselamuNo ratings yet
- Automatic Temperature Controlled FanDocument27 pagesAutomatic Temperature Controlled Fankannan100% (2)
- Industrial Equipment Controlled With Temperature123Document41 pagesIndustrial Equipment Controlled With Temperature123sunnypratyuNo ratings yet
- Presented By:-: Temperature Controlled DC FanDocument19 pagesPresented By:-: Temperature Controlled DC FanAkash HalliNo ratings yet
- Instrumentation - Unit 5Document125 pagesInstrumentation - Unit 5Rinki KeswaniNo ratings yet
- Open Loop Control Using PWM for Motor and LightDocument18 pagesOpen Loop Control Using PWM for Motor and Lightafshan ishaqNo ratings yet
- Sensors & ActuatorsDocument67 pagesSensors & Actuatorsmahendra naik100% (1)
- UntitledDocument13 pagesUntitledrejianbuNo ratings yet
- Automated Unified System For LPG UsingDocument84 pagesAutomated Unified System For LPG UsingVirat KaliNo ratings yet
- Chapter 5 Signal ConditioningDocument70 pagesChapter 5 Signal ConditioningAkramNo ratings yet
- LM 358 IC: Component DiscriptionDocument15 pagesLM 358 IC: Component DiscriptionLokesh RawatNo ratings yet
- Study of Temp. Transducers.Document13 pagesStudy of Temp. Transducers.Dr. Poonamlata YadavNo ratings yet
- Photo-Coupler and Touch Alarm Switch: Experiment #9Document10 pagesPhoto-Coupler and Touch Alarm Switch: Experiment #9Taha Khan 4ANo ratings yet
- Microwave Engineering-Microwave MeasurementsDocument28 pagesMicrowave Engineering-Microwave MeasurementsKobid KarkeeNo ratings yet
- Photo-Coupler and Touch Alarm SwitchDocument9 pagesPhoto-Coupler and Touch Alarm SwitchZeeshan RafiqNo ratings yet
- Lesson 1452, Optoelectronics: Experiment 6, Photodiode and Phototransistor Current MeasurementsDocument30 pagesLesson 1452, Optoelectronics: Experiment 6, Photodiode and Phototransistor Current MeasurementsMagaNo ratings yet
- Block Diagram of Infrared Remote Control SwitchDocument4 pagesBlock Diagram of Infrared Remote Control SwitchminthooNo ratings yet
- Solar Energy Measurement SystemDocument8 pagesSolar Energy Measurement SystemLuke Nihal DasariNo ratings yet
- Remote Control Home Appliance Usinng RF Without MicrocontrollerDocument67 pagesRemote Control Home Appliance Usinng RF Without MicrocontrollerRamalingam Shanmugam100% (1)
- 01-Strain - Uitm-01Document14 pages01-Strain - Uitm-01Harish BabuNo ratings yet
- CMP Chemical Mechanical Polishing Process Smooths SurfacesDocument3 pagesCMP Chemical Mechanical Polishing Process Smooths SurfacesjintoNo ratings yet
- Chakras (Easternbody)Document23 pagesChakras (Easternbody)iliikoNo ratings yet
- Life Meaning in ShortDocument1 pageLife Meaning in ShortjintoNo ratings yet
- Theory of Machines Questions and Answers OldDocument123 pagesTheory of Machines Questions and Answers OldSaajal Sharma81% (27)
- Audio Quality White Paper (YAMAHA)Document76 pagesAudio Quality White Paper (YAMAHA)KennyChoeNo ratings yet
- Med TransDocument8 pagesMed TransAnya MayNo ratings yet
- Salesforce Pages Developers GuideDocument798 pagesSalesforce Pages Developers GuideMalladi KowshikNo ratings yet
- Introduction To Computers and Programming Languages: Animated VersionDocument9 pagesIntroduction To Computers and Programming Languages: Animated VersionJuan Del AngelNo ratings yet
- Hcna-Hntd Entry Lab Guide v2.1Document136 pagesHcna-Hntd Entry Lab Guide v2.1ALMACHIUS RWERENGELANo ratings yet
- FLEXIBOWL V2.0 - Electrical Panel (EN)Document7 pagesFLEXIBOWL V2.0 - Electrical Panel (EN)Adolfo ReverteNo ratings yet
- Shashank Kumar: Morgantown, West VirginiaDocument1 pageShashank Kumar: Morgantown, West VirginiaShashank KumarNo ratings yet
- Bilgmon488 Instruction Manual VT PDFDocument33 pagesBilgmon488 Instruction Manual VT PDFharikrishnanpd3327No ratings yet
- 5539 Project ManagementDocument6 pages5539 Project Managementmeelas123No ratings yet
- Bbab 13 Ekontek PDFDocument16 pagesBbab 13 Ekontek PDFeva apriliaNo ratings yet
- Power Supply Systems Surge Arresters - Type 2: SPD Type 2 According To EN 61643-11 SPD Class II According To IEC 61643-1Document3 pagesPower Supply Systems Surge Arresters - Type 2: SPD Type 2 According To EN 61643-11 SPD Class II According To IEC 61643-1Jonathan Quispe TNo ratings yet
- China Mobile Unlock Code With PDFDocument5 pagesChina Mobile Unlock Code With PDFhusyn488450% (4)
- Study Permit Re-Application for Computer Systems ProgramDocument8 pagesStudy Permit Re-Application for Computer Systems ProgramKeshavDhanwantryNo ratings yet
- Daikin Altherma 3 Low Capacity Monobloc - 764Document11 pagesDaikin Altherma 3 Low Capacity Monobloc - 764Florea Nicolae AlexandruNo ratings yet
- Ladder Diagram: Rung 1 Rung 2 Rung 3Document26 pagesLadder Diagram: Rung 1 Rung 2 Rung 3abdullah 3mar abou reashaNo ratings yet
- Siebel Field ServiceDocument4 pagesSiebel Field ServicesubbaraocrmNo ratings yet
- 9590-4002 v5 Wired Control Installation Owners-2Document32 pages9590-4002 v5 Wired Control Installation Owners-2Phương LanNo ratings yet
- Introduction To FlowchartingDocument32 pagesIntroduction To FlowchartingMissia H. SabtalNo ratings yet
- Symmetric Hash Encryption Image As KeyDocument5 pagesSymmetric Hash Encryption Image As KeySkaManojNo ratings yet
- Buc NorsatDocument3 pagesBuc NorsatedgarlibanioNo ratings yet
- Alkiviadis Papadakis CVDocument4 pagesAlkiviadis Papadakis CVAlkiviadis PapadakisNo ratings yet
- The Bootcampers Guide To Web AccessibilityDocument137 pagesThe Bootcampers Guide To Web AccessibilityNguyen Duy HaiNo ratings yet
- E7756v1 3 PDFDocument82 pagesE7756v1 3 PDFxmieNo ratings yet
- (LTE) - Default Bearer, Dedicated Bearer PDFDocument7 pages(LTE) - Default Bearer, Dedicated Bearer PDFABHISHEK AGARWALNo ratings yet
- Legal NewayDocument2 pagesLegal Newayhr pslNo ratings yet
- View JournalDocument724 pagesView JournalDIY ELECTRONo ratings yet
- Galaxy 5500 - SpecificationsDocument36 pagesGalaxy 5500 - SpecificationsVu Minh TuanNo ratings yet
- Digitarq: Creating and Managing A Digital Archive.: January 2004Document9 pagesDigitarq: Creating and Managing A Digital Archive.: January 2004Oumayma AyadiNo ratings yet
- Solved Problems in Probability 2017Document24 pagesSolved Problems in Probability 2017WendyWendyU0% (3)
- Fifth Edition: Decision Structures and Boolean LogicDocument45 pagesFifth Edition: Decision Structures and Boolean LogicChloe LINNo ratings yet
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (542)
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsFrom EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsRating: 4 out of 5 stars4/5 (1)
- Lithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsFrom EverandLithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsRating: 5 out of 5 stars5/5 (2)
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026From EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Rating: 5 out of 5 stars5/5 (1)
- Off-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemFrom EverandOff-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemNo ratings yet
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4 out of 5 stars4/5 (331)
- Understanding Automotive Electronics: An Engineering PerspectiveFrom EverandUnderstanding Automotive Electronics: An Engineering PerspectiveRating: 3.5 out of 5 stars3.5/5 (16)
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- C++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingFrom EverandC++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingRating: 4 out of 5 stars4/5 (1)
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesFrom EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesRating: 5 out of 5 stars5/5 (1)
- Build Your Own Electric Vehicle, Third EditionFrom EverandBuild Your Own Electric Vehicle, Third EditionRating: 4.5 out of 5 stars4.5/5 (3)
- Ramblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowFrom EverandRamblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowNo ratings yet
- The Rare Metals War: the dark side of clean energy and digital technologiesFrom EverandThe Rare Metals War: the dark side of clean energy and digital technologiesRating: 5 out of 5 stars5/5 (2)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 5 out of 5 stars5/5 (8)
- Beginner's Guide to Reading Schematics, Fourth EditionFrom EverandBeginner's Guide to Reading Schematics, Fourth EditionRating: 3.5 out of 5 stars3.5/5 (10)
- Current Interruption Transients CalculationFrom EverandCurrent Interruption Transients CalculationRating: 4 out of 5 stars4/5 (1)
- Operational Amplifier Circuits: Analysis and DesignFrom EverandOperational Amplifier Circuits: Analysis and DesignRating: 4.5 out of 5 stars4.5/5 (2)
- Digital Gold: The Beginner's Guide to Digital Product Success, Learn Useful Tips and Methods on How to Create Digital Products and Earn Massive ProfitsFrom EverandDigital Gold: The Beginner's Guide to Digital Product Success, Learn Useful Tips and Methods on How to Create Digital Products and Earn Massive ProfitsRating: 5 out of 5 stars5/5 (3)
- The Graphene Revolution: The Weird Science of the Ultra-thinFrom EverandThe Graphene Revolution: The Weird Science of the Ultra-thinRating: 4.5 out of 5 stars4.5/5 (4)
- Electrical Principles and Technology for EngineeringFrom EverandElectrical Principles and Technology for EngineeringRating: 4 out of 5 stars4/5 (4)