You might also like
- Lecture 2: Wave Equations, Green's Function, Huygens' Principle and Fresnel ZonesDocument30 pagesLecture 2: Wave Equations, Green's Function, Huygens' Principle and Fresnel ZonesSohom DasNo ratings yet
- A 3D FDTD Code Implemented in MATLABDocument38 pagesA 3D FDTD Code Implemented in MATLABAli Mhd100% (2)
- CH 10Document25 pagesCH 10Mohammed AliNo ratings yet
- Maxwell's Equations For MagnetsDocument38 pagesMaxwell's Equations For MagnetsYudhistiraMirzaNo ratings yet
- 1st Lecture The Maxwell EquationsDocument4 pages1st Lecture The Maxwell EquationstiagoplopesNo ratings yet
- VV (Associated With: Plane Waves and Refractive IndexDocument18 pagesVV (Associated With: Plane Waves and Refractive IndexDaniel MejiaNo ratings yet
- Phy543 HW Combo PDFDocument3 pagesPhy543 HW Combo PDFAbdul Jalil MondalNo ratings yet
- A Novel Approach to Analyze Circular WaveguidesDocument19 pagesA Novel Approach to Analyze Circular WaveguidesLam DinhNo ratings yet
- Milan PerkovacDocument8 pagesMilan Perkovacjosip_982156232No ratings yet
- Classical Electromagnetism and OpticsDocument159 pagesClassical Electromagnetism and OpticsRodrigo PaludoNo ratings yet
- 2475905Document27 pages2475905Nithyananthan KrishnanNo ratings yet
- Wave EquationDocument14 pagesWave EquationbigouzypolNo ratings yet
- Persamaan Maxwell (Derive Maxwell)Document14 pagesPersamaan Maxwell (Derive Maxwell)M Hilmi ZulkifliNo ratings yet
- Fundamentals of Array Signal Processing: Adaptive Array Systems 2005 John Wiley & Sons, LTD ISBN 0-470-86189-4Document30 pagesFundamentals of Array Signal Processing: Adaptive Array Systems 2005 John Wiley & Sons, LTD ISBN 0-470-86189-4zshabanNo ratings yet
- Symmetry: Implications of Gauge-Free Extended ElectrodynamicsDocument22 pagesSymmetry: Implications of Gauge-Free Extended ElectrodynamicsMo IbraNo ratings yet
- Aperture Coupling - HarringtonDocument24 pagesAperture Coupling - HarringtonPavelVilnerNo ratings yet
- Plasmonic Optics Theory and ApplicationsDocument39 pagesPlasmonic Optics Theory and Applicationstolasa tamasgenNo ratings yet
- Computation of Dyadic Green's Functions For Electrodynamics in Quasi-Static Approximation With Tensor Conductivity PDFDocument16 pagesComputation of Dyadic Green's Functions For Electrodynamics in Quasi-Static Approximation With Tensor Conductivity PDFnbhyblijunNo ratings yet
- Maxwell's Equations (SI Units) Differential Form: Density of ChargesDocument7 pagesMaxwell's Equations (SI Units) Differential Form: Density of Chargesgthulasi787126No ratings yet
- The Magnetic Field Induced by A Lightning Strike's Indirect Effect Double Exponential Current WaveformDocument5 pagesThe Magnetic Field Induced by A Lightning Strike's Indirect Effect Double Exponential Current WaveformVijay KumarNo ratings yet
- Maxwell's Equations ExplainedDocument17 pagesMaxwell's Equations ExplainedMuhammad SaleemNo ratings yet
- Chapter IIDocument28 pagesChapter IISantosh Kumar100% (1)
- Introduction To ElectromagneticsDocument74 pagesIntroduction To ElectromagneticsSamrat PvNo ratings yet
- ElectromagnetismoDocument4 pagesElectromagnetismoolazagutiaNo ratings yet
- Models For Scattering From Rough SurfaceDocument24 pagesModels For Scattering From Rough SurfacesplouvrosNo ratings yet
- Technological Aspects: High Voltage: D.C. FairclothDocument39 pagesTechnological Aspects: High Voltage: D.C. FairclothMuhammad Usama MalikNo ratings yet
- Investigation of Radiation Problem For Two Separated MediumsDocument9 pagesInvestigation of Radiation Problem For Two Separated MediumsAJER JOURNALNo ratings yet
- Talk (Hehl & Obukhov)Document22 pagesTalk (Hehl & Obukhov)Nilson Yecid BautistaNo ratings yet
- 34995051Document18 pages34995051moalaa123321No ratings yet
- Wave EquationDocument14 pagesWave EquationSawon KhanNo ratings yet
- EMF - 2 Mark & 16 MarksDocument26 pagesEMF - 2 Mark & 16 MarksKALAIMATHINo ratings yet
- Basics of Electrodynamics: 2.1 The Maxwell EquationsDocument8 pagesBasics of Electrodynamics: 2.1 The Maxwell EquationsGerardo Urrutia Sánchez100% (1)
- Part 1: Maxwell's Equations: PHYS370 - Advanced ElectromagnetismDocument29 pagesPart 1: Maxwell's Equations: PHYS370 - Advanced ElectromagnetismGuru VelmathiNo ratings yet
- Chapter 1Document7 pagesChapter 1Aykut YilmazNo ratings yet
- C: Theory of EM Field Propagation in The Earth: Geophysics 424 - January 2012Document16 pagesC: Theory of EM Field Propagation in The Earth: Geophysics 424 - January 2012Muhammad Amir ZainNo ratings yet
- Sri 05 09 351Document8 pagesSri 05 09 351Hanbin KangNo ratings yet
- Magnetohydrodyna Mics: Latest of AllDocument11 pagesMagnetohydrodyna Mics: Latest of Allshailesh singhNo ratings yet
- Raven 2018 J. Phys. Commun. 2 035028Document11 pagesRaven 2018 J. Phys. Commun. 2 035028Eduard Luka MudriNo ratings yet
- Comeelini Et Al. A Computer Program For Determining Electrical Resistance and Reactance of Any Transmission LineDocument7 pagesComeelini Et Al. A Computer Program For Determining Electrical Resistance and Reactance of Any Transmission LineMarcos EmmanuelNo ratings yet
- Maxwells EquationsDocument9 pagesMaxwells EquationsPuneeth SiddappaNo ratings yet
- Calculation of The Ionized Field Around The DC Voltage DividerDocument4 pagesCalculation of The Ionized Field Around The DC Voltage DividerElhanafi OuatahNo ratings yet
- Boerner 2008BeijingReview SG 2010 PDFDocument21 pagesBoerner 2008BeijingReview SG 2010 PDFjuvitoQQNo ratings yet
- Wei - Paper For PetrophysicDocument13 pagesWei - Paper For Petrophysicyangwei00414312No ratings yet
- Important Concepts in High Frequency Electromagnetics: Edl HDLDocument72 pagesImportant Concepts in High Frequency Electromagnetics: Edl HDLRajen Kumar PatraNo ratings yet
- Preliminary Background PDFDocument44 pagesPreliminary Background PDFOzlem OzgunNo ratings yet
- 02chapters1 3Document30 pages02chapters1 3Robbi HidayatNo ratings yet
- c2Document103 pagesc2Abdias YanVidiNo ratings yet
- Questions & Answers On Maxwell EquationsDocument20 pagesQuestions & Answers On Maxwell Equationskibrom atsbha50% (2)
- Introduction To Quantum Mechanics: Historical BackgroundDocument9 pagesIntroduction To Quantum Mechanics: Historical BackgroundEnesEmreTaşNo ratings yet
- PhysRevB 102 064212Document4 pagesPhysRevB 102 064212leNo ratings yet
- Estimation of Hydraulic Parameters From Vertical Electrical Resistivity SoundingDocument12 pagesEstimation of Hydraulic Parameters From Vertical Electrical Resistivity SoundingHassan HamzaNo ratings yet
- Maximum Limit of Rotational Energy Transfers in C - He System and Power Gap LawDocument6 pagesMaximum Limit of Rotational Energy Transfers in C - He System and Power Gap LawInternational Organization of Scientific Research (IOSR)No ratings yet
- EM Chapter 07Document68 pagesEM Chapter 07Naureen ButtNo ratings yet
- Chapter 5. Atmospheric Effects in Radio Waves PropagationDocument229 pagesChapter 5. Atmospheric Effects in Radio Waves PropagationRahma SariNo ratings yet
- Additional Losses in Massive Copper Due To Eddy-Currents ConductorDocument5 pagesAdditional Losses in Massive Copper Due To Eddy-Currents ConductorVahidNo ratings yet
- Charged Particle Motion in Time-Varying Electromagnetic FieldsDocument2 pagesCharged Particle Motion in Time-Varying Electromagnetic FieldsMridusmita BoruahNo ratings yet
- EEE 498/598 Overview of Electrical Engineering Lecture 2 Maxwell's Equations and Introduction to ElectromagneticsDocument78 pagesEEE 498/598 Overview of Electrical Engineering Lecture 2 Maxwell's Equations and Introduction to ElectromagneticsDhondiram Maruthi KakreNo ratings yet
- Feynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterFrom EverandFeynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterNo ratings yet
- Harmonic Vector Fields: Variational Principles and Differential GeometryFrom EverandHarmonic Vector Fields: Variational Principles and Differential GeometryRating: 5 out of 5 stars5/5 (1)
- Geophysical Field Theory and Method, Part B: Electromagnetic Fields IFrom EverandGeophysical Field Theory and Method, Part B: Electromagnetic Fields INo ratings yet
- Data Management & Warehousing: MPBA G506Document16 pagesData Management & Warehousing: MPBA G506Nitin RAJNo ratings yet
- Data Management & Warehousing: MPBA G506Document17 pagesData Management & Warehousing: MPBA G506Nitin RAJNo ratings yet
- PTT WindsorRegionalHospital CaseStudy enDocument2 pagesPTT WindsorRegionalHospital CaseStudy enNitin RAJNo ratings yet
- ACFrOgCQZVULXT RMN8gQxrb CtuGOVYmLi6Piu1Et4giY5itNf68 Fa6IMImkElWjCHJcWa9PRfn5IVe1woeDTO49YNtkugY5AApudJJqEhJcSNpHi4vw8m QtFZPnckXrxs2pZ1VMzt EXWwEDocument4 pagesACFrOgCQZVULXT RMN8gQxrb CtuGOVYmLi6Piu1Et4giY5itNf68 Fa6IMImkElWjCHJcWa9PRfn5IVe1woeDTO49YNtkugY5AApudJJqEhJcSNpHi4vw8m QtFZPnckXrxs2pZ1VMzt EXWwENitin RAJNo ratings yet
- Practice Puzzle - 1: New Batch For CAT - Online Classes - Call - 7009218049 For EnquiryDocument7 pagesPractice Puzzle - 1: New Batch For CAT - Online Classes - Call - 7009218049 For EnquiryNitin RAJNo ratings yet
- ACFrOgBy2JBx Jof0bJzInxOS Oi DthePEgdd2lX75sCb0eD-2zAWVUzUUyJuVyO3Rr4FfNLjPIJkwuR6zXYFoVoiXHac9ClXuYHYFI-YdiZb VQimmXt7iXSSsN5h7RZ6Y3VuDmenk6t2JgtGkDocument19 pagesACFrOgBy2JBx Jof0bJzInxOS Oi DthePEgdd2lX75sCb0eD-2zAWVUzUUyJuVyO3Rr4FfNLjPIJkwuR6zXYFoVoiXHac9ClXuYHYFI-YdiZb VQimmXt7iXSSsN5h7RZ6Y3VuDmenk6t2JgtGkNitin RAJNo ratings yet
- Data Management & Warehousing: MPBA G506Document17 pagesData Management & Warehousing: MPBA G506Nitin RAJNo ratings yet
- Ee461 S2a HandoutDocument14 pagesEe461 S2a HandoutNitin RAJNo ratings yet
- Microwave and Optical Communications Lab ManualDocument142 pagesMicrowave and Optical Communications Lab ManualNitin RAJ100% (1)
- Signals, Systems & ControlDocument2 pagesSignals, Systems & ControlNitin RAJNo ratings yet
- Saudi Aramco Test ReportDocument10 pagesSaudi Aramco Test Reportkarthi51289100% (1)
- Using an Oscilloscope and Function GeneratorDocument21 pagesUsing an Oscilloscope and Function GeneratorBaya LilypinkNo ratings yet
- cx-400 v2 Inst eDocument9 pagescx-400 v2 Inst edao trong nghiaNo ratings yet
- TeslaDocument3 pagesTeslaKESH MusicNo ratings yet
- 1A Adjustable/Fixed Low Dropout Linear Regulator: Key Features General DescriptionDocument9 pages1A Adjustable/Fixed Low Dropout Linear Regulator: Key Features General DescriptionEDSONNo ratings yet
- Calculate Cable Size and Voltage Drop Electrical Notes Articles PDFDocument10 pagesCalculate Cable Size and Voltage Drop Electrical Notes Articles PDFKamugasha Kagonyera100% (1)
- Motor StartingDocument24 pagesMotor Startingeng_mahmoud3000100% (1)
- 07.12.2021 Maha+revisionDocument376 pages07.12.2021 Maha+revisionDeepak YadavNo ratings yet
- Hand Book ProteccionesDocument356 pagesHand Book ProteccionesFrozen TgrNo ratings yet
- ABB ACS 1000 Tech Catalog RevDDocument161 pagesABB ACS 1000 Tech Catalog RevDElena Koneva50% (2)
- Introduction To Semiconductor Lasers For Optical CommunicationsDocument369 pagesIntroduction To Semiconductor Lasers For Optical CommunicationsDetian WangNo ratings yet
- Ccs 646v e GV e DatasheetDocument2 pagesCcs 646v e GV e DatasheetLeonardNo ratings yet
- Laser Emitting DiodeDocument25 pagesLaser Emitting Diodelaurilla22_No ratings yet
- 4 X 13 W Dual/quad Power Amplifier: FeaturesDocument25 pages4 X 13 W Dual/quad Power Amplifier: FeaturesDaruslan StrNo ratings yet
- AC 800PEC Control SystemDocument37 pagesAC 800PEC Control Systemn_navaneethNo ratings yet
- Energies: Analysis and Design of High-Efficiency Bidirectional Gan-Based CLLC Resonant ConverterDocument13 pagesEnergies: Analysis and Design of High-Efficiency Bidirectional Gan-Based CLLC Resonant ConverterThien DinhNo ratings yet
- Figure 1: Dipole AntennaDocument2 pagesFigure 1: Dipole Antennahasnizaaziz39No ratings yet
- EIM - (Common) Terminate and Connect Electrical WiringDocument17 pagesEIM - (Common) Terminate and Connect Electrical WiringOliver Sy100% (1)
- Be Winter 2018Document2 pagesBe Winter 2018vikram patilNo ratings yet
- A State Space Single-Phase Transformer Model Incorporating Nonlinear Phenomena Magnetic Saturation and Hysteresis For Transient and Periodic Steady-State AnalysisDocument5 pagesA State Space Single-Phase Transformer Model Incorporating Nonlinear Phenomena Magnetic Saturation and Hysteresis For Transient and Periodic Steady-State Analysissreekantha2013No ratings yet
- Electro ChemistryDocument34 pagesElectro ChemistryFam IlyNo ratings yet
- TEFELEN Technical Product CatalogueDocument16 pagesTEFELEN Technical Product CatalogueDiego MantillaNo ratings yet
- Case Studies On Tariff Discovery Through Competitive Bidding, of PowerDocument67 pagesCase Studies On Tariff Discovery Through Competitive Bidding, of Powerkchoudhary86No ratings yet
- Akash Singh's Document on Liquid LensesDocument27 pagesAkash Singh's Document on Liquid LensesAbhay SinghNo ratings yet
- J12-1000 A 07-3.1Document99 pagesJ12-1000 A 07-3.1SawonNo ratings yet
- Apostila CLP Omrom BRDocument671 pagesApostila CLP Omrom BRreinaldopf2011No ratings yet
- EM1 CompsDocument5 pagesEM1 CompsDelta VisionNo ratings yet
- St. Andrew's Junior College JC2 2015 Preliminary Exam Physics Paper 2Document24 pagesSt. Andrew's Junior College JC2 2015 Preliminary Exam Physics Paper 2VarshLokNo ratings yet
- ELECS1 Module 1 Introduction and HistoryDocument20 pagesELECS1 Module 1 Introduction and HistoryJuan Miguel VillarroelNo ratings yet
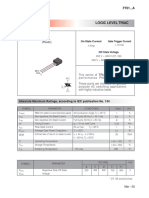
- LOGIC LEVEL TRIAC TECHNICAL SPECIFICATIONSDocument4 pagesLOGIC LEVEL TRIAC TECHNICAL SPECIFICATIONSAnatoly WolkoffNo ratings yet