You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hawkboard Schematics v1Document11 pagesHawkboard Schematics v1Sam KhawseNo ratings yet
- PLC FatekDocument36 pagesPLC FatekM7mud M7mdNo ratings yet
- Power GatingDocument20 pagesPower GatingNandhita AureaNo ratings yet
- Topics Covered: - Bistables - R-S Bistables - D-Type Bistables - J-K BistablesDocument49 pagesTopics Covered: - Bistables - R-S Bistables - D-Type Bistables - J-K Bistablesmahendra naikNo ratings yet
- Course OutlineDocument4 pagesCourse Outlinemralex11No ratings yet
- SyntutDocument182 pagesSyntutThomaselvaNo ratings yet
- Arduino Ethernet development board guideDocument6 pagesArduino Ethernet development board guideAVRNATORNo ratings yet
- Digital Electronics & Computer Fundamentals Theory.Document137 pagesDigital Electronics & Computer Fundamentals Theory.Raju Ali Kawsar50% (2)
- Programmer Pinouts: 2016 Benedikt StockebrandDocument4 pagesProgrammer Pinouts: 2016 Benedikt Stockebrandsalelg1980No ratings yet
- 01 IntroductionDocument31 pages01 IntroductionZulhazlin Bin AbasNo ratings yet
- Byte Alignment and OrderingDocument5 pagesByte Alignment and OrderingrupjyotisarmahNo ratings yet
- Super BufferDocument41 pagesSuper Bufferurallalone100% (1)
- 220-601 With AnswersDocument134 pages220-601 With AnswersQueetco100% (2)
- DS2480BDocument32 pagesDS2480Bmarte129No ratings yet
- MB Manual Ga-g41m-Combo v2.0 eDocument44 pagesMB Manual Ga-g41m-Combo v2.0 eblackguard999No ratings yet
- Microcontroller 1 J2 and 3 Module NotesDocument38 pagesMicrocontroller 1 J2 and 3 Module NotesArun RajNo ratings yet
- Asic Interview QuestionsDocument11 pagesAsic Interview QuestionspvegaNo ratings yet
- Manual Pluto DataDocument8 pagesManual Pluto DataDouglas RodriguesNo ratings yet
- Ec8681 MPMC Lab - Vi Sem EceDocument166 pagesEc8681 MPMC Lab - Vi Sem EceEzhil Azhahi.AM Assistant Professor100% (5)
- JPEG Encoder IP CoreDocument3 pagesJPEG Encoder IP CoreLundgrenNo ratings yet
- JQ6500 Voice ModuleDocument9 pagesJQ6500 Voice ModuleAquiles Esquivel Madrazo0% (1)
- X10SRA-F - Motherboards - Products - Super Micro Computer, Inc PDFDocument4 pagesX10SRA-F - Motherboards - Products - Super Micro Computer, Inc PDFJem TorresNo ratings yet
- Internal Structure of CPUDocument5 pagesInternal Structure of CPUSaad KhanNo ratings yet
- CMOS Inverter: DC Analysis: Courtesy: Prof Andrew MasonDocument8 pagesCMOS Inverter: DC Analysis: Courtesy: Prof Andrew MasonvmspraneethNo ratings yet
- Program AVRs using Arduino Uno as an ISPDocument8 pagesProgram AVRs using Arduino Uno as an ISPHrvojeNo ratings yet
- Hardware Hacking 101: Bsides Munich 2019 Radek Domanski, Johannes WagnerDocument38 pagesHardware Hacking 101: Bsides Munich 2019 Radek Domanski, Johannes WagnerSadry Fievet100% (1)
- Caracteristicas MemoriasDocument87 pagesCaracteristicas MemoriasMastroiani OsvaldoNo ratings yet
- Ap7202-Asic and FpgaDocument12 pagesAp7202-Asic and FpgaMOTHI.R MEC-AP/ECENo ratings yet
- V3R1 Progress CodeDocument126 pagesV3R1 Progress CodeBalan LanNo ratings yet
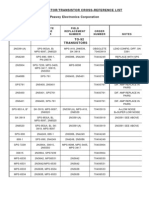
- Peavey Semiconductor Cross Reference ListDocument24 pagesPeavey Semiconductor Cross Reference Listren_theoriginalpunks100% (9)